







近期,因为要实现经过多个控制点的曲线拟合,研究起了曲线拟合算法。综合搜索到的资料,发现Bezier曲线拟合算法是一种相对较容易实现、且拟合的效果较好的算法。关于Bezier曲线原理,请参照(Bezier曲线原理),这里就不再做具体介绍了,我们使用的是Besier三次曲线拟合原理。下面主要介绍算法的实现过程。
如下图中,P0、P1、P2、P3四个点,我们最终是想获取过这四个点的封闭平滑曲线。
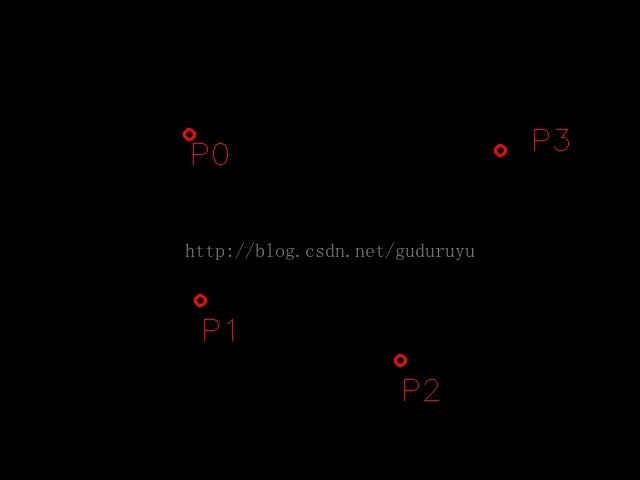
根据Bezier三次曲线拟合的原理,我们可以分别拟合P0P1、P1P2、P2P3、P3P0四段曲线,进而连接成一个封闭的曲线。但是,Bezier三次曲线拟合需要在两点之间找到两个控制点。每个点的控制点可以根据其前后相邻的两点获得,具体实现如下:
void get_control_points(double x0, double y0, double x1, double y1, double x2, double y2,
double& p1x, double& p1y, double& p2x, double& p2y, double t)
{
double d01 = sqrt(pow(x1 - x0, 2) + pow(y1 - y0, 2));
double d12 = sqrt(pow(x2 - x1, 2) + pow(y2 - y1, 2));
double fa = t * d01 / (d01 + d12);
double fb = t * d12 / (d01 + d12);
p1x = x1 - fa * (x2 - x0);
p1y = y1 - fa * (y2 - y0);
p2x = x1 + fb * (x2 - x0);
p2y = y1 + fb * (y2 - y0);
return;
}其中,(x0,y0)、(x1,y1)、(x2,y2)分别为P0、P1、P2三点的坐标;t为曲率因子(取值范围0-1.0),影响的是拟合曲线的曲率,后面将对其作进一步介绍。根据三点的坐标和t,即可求得P1点的两个控制点C10(p1x,p1y)、C11(p2x,p2y)。
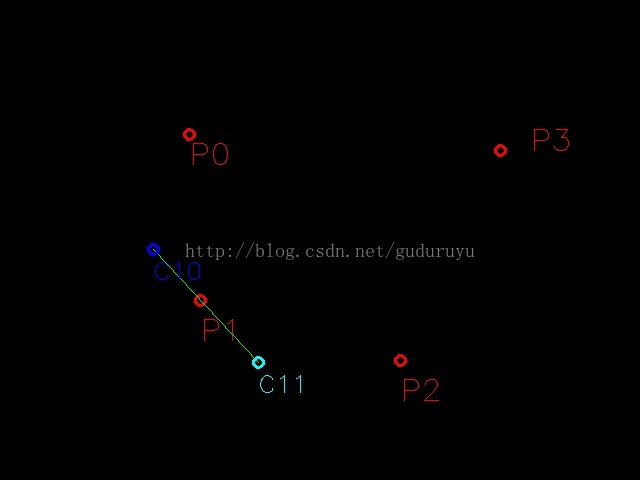
以此类推,我们可分别求得P2、P3、P0等各点的控制点,如下图所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4306
4306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









