







原文地址:http://blog.csdn.net/jinshengtao/article/details/30970733
http://blog.csdn.net/jinshengtao?viewmode=contents
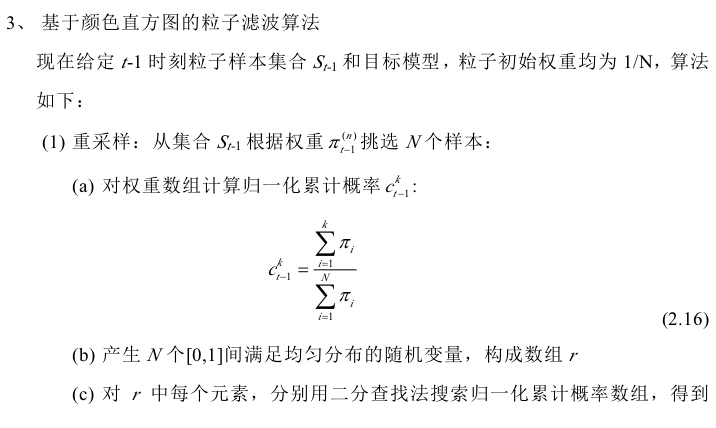
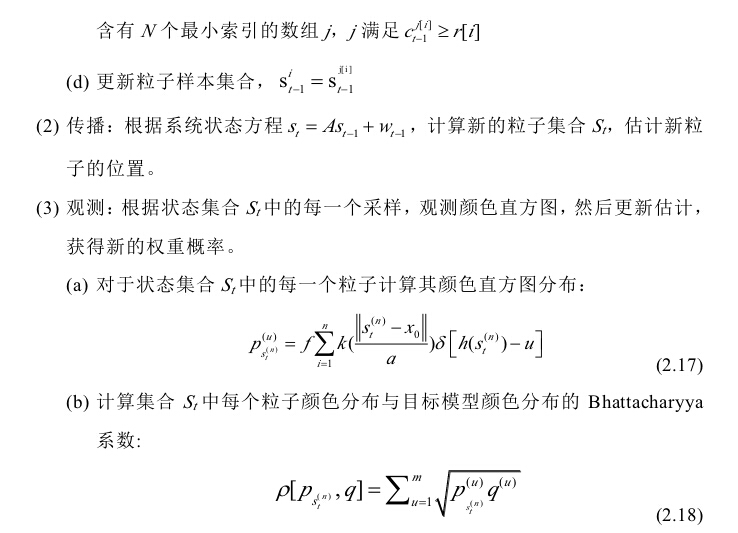
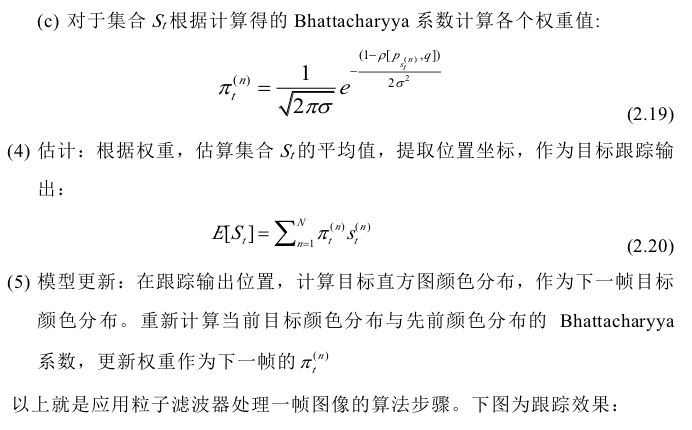
推荐大家看论文《An adaptive color-based particle filter》
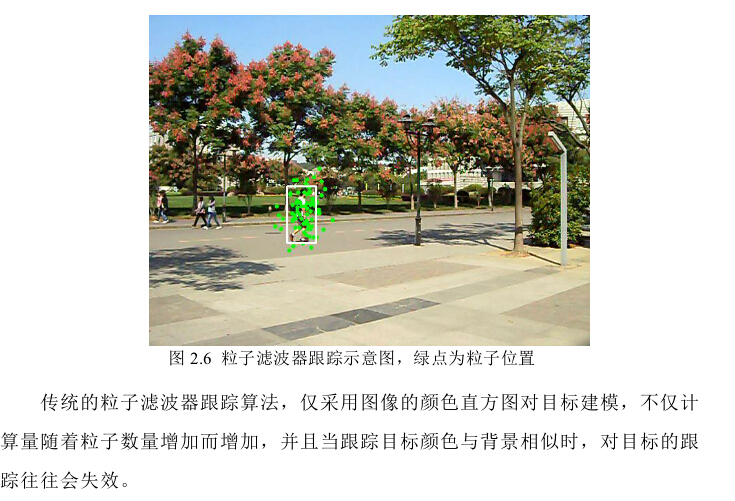
这次我直接截图我的硕士毕业论文的第二章的一部分,应该讲得比较详细了。最后给出我当时在pudn找到的最适合学习的实现代码
代码实现:
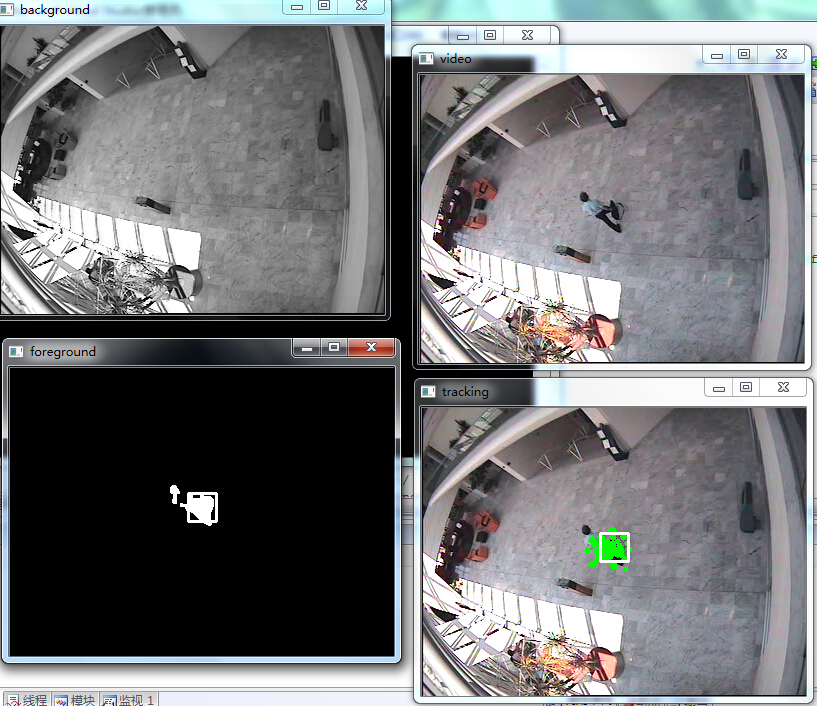
运行方式:按P停止,在前景窗口鼠标点击目标,会自动生成外接矩形,再次按P,对该选定目标进行跟踪。
- // TwoLevel.cpp : 定义控制台应用程序的入口点。
- //
- /************************************************************************/
- /*参考文献real-time Multiple Objects Tracking with Occlusion Handling in Dynamic Scenes */
- /************************************************************************/
- #include "stdafx.h"
- #include <cv.h>
- #include <cxcore.h>
- #include <highgui.h>
- #include <math.h>
- # include <time.h>
- #include <iostream>
- using namespace std;
- #define B(image,x,y) ((uchar*)(image->imageData + image->widthStep*(y)))[(x)*3] //B
- #define G(image,x,y) ((uchar*)(image->imageData + image->widthStep*(y)))[(x)*3+1] //G
- #define R(image,x,y) ((uchar*)(image->imageData + image->widthStep*(y)))[(x)*3+2] //R
- #define S(image,x,y) ((uchar*)(image->imageData + image->widthStep*(y)))[(x)]
- #define Num 10 //帧差的间隔
- #define T 40 //Tf
- #define Re 30 //
- #define ai 0.08 //学习率
- #define CONTOUR_MAX_AREA 10000
- #define CONTOUR_MIN_AREA 50
- # define R_BIN 8 /* 红色分量的直方图条数 */
- # define G_BIN 8 /* 绿色分量的直方图条数 */
- # define B_BIN 8 /* 兰色分量的直方图条数 */
- # define R_SHIFT 5 /* 与上述直方图条数对应 */
- # define G_SHIFT 5 /* 的R、G、B分量左移位数 */
- # define B_SHIFT 5 /* log2( 256/8 )为移动位数 */
- /*
- 采用Park and Miller方法产生[0,1]之间均匀分布的伪随机数
- 算法详细描述见:
- [1] NUMERICAL RECIPES IN C: THE ART OF SCIENTIFIC COMPUTING.
- Cambridge University Press. 1992. pp.278-279.
- [2] Park, S.K., and Miller, K.W. 1988, Communications of the ACM,
- vol. 31, pp. 1192–1201.
- */
- #define IA 16807
- #define IM 2147483647
- #define AM (1.0/IM)
- #define IQ 127773
- #define IR 2836
- #define MASK 123459876
- typedef struct __SpaceState { /* 状态空间变量 */
- int xt; /* x坐标位置 */
- int yt; /* x坐标位置 */
- float v_xt; /* x方向运动速度 */
- float v_yt; /* y方向运动速度 */
- int Hxt; /* x方向半窗宽 */
- int Hyt; /* y方向半窗宽 */
- float at_dot; /* 尺度变换速度 */
- } SPACESTATE;
- bool pause=false;//是否暂停
- bool track = false;//是否跟踪
- IplImage *curframe=NULL;
- IplImage *pBackImg=NULL;
- IplImage *pFrontImg=NULL;
- IplImage *pTrackImg =NULL;
- unsigned char * img;//把iplimg改到char* 便于计算
- int xin,yin;//跟踪时输入的中心点
- int xout,yout;//跟踪时得到的输出中心点
- int Wid,Hei;//图像的大小
- int WidIn,HeiIn;//输入的半宽与半高
- int WidOut,HeiOut;//输出的半宽与半高
- long ran_seed = 802163120; /* 随机数种子,为全局变量,设置缺省值 */
- float DELTA_T = (float)0.05; /* 帧频,可以为30,25,15,10等 */
- int POSITION_DISTURB = 15; /* 位置扰动幅度 */
- float VELOCITY_DISTURB = 40.0; /* 速度扰动幅值 */
- float SCALE_DISTURB = 0.0; /* 窗宽高扰动幅度 */
- float SCALE_CHANGE_D = (float)0.001; /* 尺度变换速度扰动幅度 */
- int NParticle = 75; /* 粒子个数 */
- float * ModelHist = NULL; /* 模型直方图 */
- SPACESTATE * states = NULL; /* 状态数组 */
- float * weights = NULL; /* 每个粒子的权重 */
- int nbin; /* 直方图条数 */
- float Pi_Thres = (float)0.90; /* 权重阈值 */
- float Weight_Thres = (float)0.0001; /* 最大权重阈值,用来判断是否目标丢失 */
- /*
- 设置种子数
- 一般利用系统时间来进行设置,也可以直接传入一个long型整数
- */
- long set_seed( long setvalue )
- {
- if ( setvalue != 0 ) /* 如果传入的参数setvalue!=0,设置该数为种子 */
- ran_seed = setvalue;
- else /* 否则,利用系统时间为种子数 */
- {
- ran_seed = time(NULL);
- }
- return( ran_seed );
- }
- /*
- 计算一幅图像中某个区域的彩色直方图分布
- 输入参数:
- int x0, y0: 指定图像区域的中心点
- int Wx, Hy: 指定图像区域的半宽和半高
- unsigned char * image:图像数据,按从左至右,从上至下的顺序扫描,
- 颜色排列次序:RGB, RGB, ...
- (或者:YUV, YUV, ...)
- int W, H: 图像的宽和高
- 输出参数:
- float * ColorHist: 彩色直方图,颜色索引按:
- i = r * G_BIN * B_BIN + g * B_BIN + b排列
- int bins: 彩色直方图的条数R_BIN*G_BIN*B_BIN(这里取8x8x8=512)
- */
- void CalcuColorHistogram( int x0, int y0, int Wx, int Hy,
- unsigned char * image, int W, int H,
- float * ColorHist, int bins )
- {
- int x_begin, y_begin; /* 指定图像区域的左上角坐标 */
- int y_end, x_end;
- int x, y, i, index;
- int r, g, b;
- float k, r2, f;
- int a2;
- for ( i = 0; i < bins; i++ ) /* 直方图各个值赋0 */
- ColorHist[i] = 0.0;
- /* 考虑特殊情况:x0, y0在图像外面,或者,Wx<=0, Hy<=0 */
- /* 此时强制令彩色直方图为0 */
- if ( ( x0 < 0 ) || (x0 >= W) || ( y0 < 0 ) || ( y0 >= H )
- || ( Wx <= 0 ) || ( Hy <= 0 ) ) return;
- x_begin = x0 - Wx; /* 计算实际高宽和区域起始点 */
- y_begin = y0 - Hy;
- if ( x_begin < 0 ) x_begin = 0;
- if ( y_begin < 0 ) y_begin = 0;
- x_end = x0 + Wx;
- y_end = y0 + Hy;
- if ( x_end >= W ) x_end = W-1;
- if ( y_end >= H ) y_end = H-1;
- a2 = Wx*Wx+Hy*Hy; /* 计算核函数半径平方a^2 */
- f = 0.0; /* 归一化系数 */
- for ( y = y_begin; y <= y_end; y++ )
- for ( x = x_begin; x <= x_end; x++ )
- {
- r = image[(y*W+x)*3] >> R_SHIFT; /* 计算直方图 */
- g = image[(y*W+x)*3+1] >> G_SHIFT; /*移位位数根据R、G、B条数 */
- b = image[(y*W+x)*3+2] >> B_SHIFT;
- index = r * G_BIN * B_BIN + g * B_BIN + b;
- r2 = (float)(((y-y0)*(y-y0)+(x-x0)*(x-x0))*1.0/a2); /* 计算半径平方r^2 */
- k = 1 - r2; /* 核函数k(r) = 1-r^2, |r| < 1; 其他值 k(r) = 0 */
- f = f + k;
- ColorHist[index] = ColorHist[index] + k; /* 计算核密度加权彩色直方图 */
- }
- for ( i = 0; i < bins; i++ ) /* 归一化直方图 */
- ColorHist[i] = ColorHist[i]/f;
- return;
- }
- /*
- 计算Bhattacharyya系数
- 输入参数:
- float * p, * q: 两个彩色直方图密度估计
- int bins: 直方图条数
- 返回值:
- Bhattacharyya系数
- */
- float CalcuBhattacharyya( float * p, float * q, int bins )
- {
- int i;
- float rho;
- rho = 0.0;
- for ( i = 0; i < bins; i++ )
- rho = (float)(rho + sqrt( p[i]*q[i] ));
- return( rho );
- }
- /*# define RECIP_SIGMA 3.98942280401 / * 1/(sqrt(2*pi)*sigma), 这里sigma = 0.1 * /*/
- # define SIGMA2 0.02 /* 2*sigma^2, 这里sigma = 0.1 */
- float CalcuWeightedPi( float rho )
- {
- float pi_n, d2;
- d2 = 1 - rho;
- //pi_n = (float)(RECIP_SIGMA * exp( - d2/SIGMA2 ));
- pi_n = (float)(exp( - d2/SIGMA2 ));
- return( pi_n );
- }
- /*
- 采用Park and Miller方法产生[0,1]之间均匀分布的伪随机数
- 算法详细描述见:
- [1] NUMERICAL RECIPES IN C: THE ART OF SCIENTIFIC COMPUTING.
- Cambridge University Press. 1992. pp.278-279.
- [2] Park, S.K., and Miller, K.W. 1988, Communications of the ACM,
- vol. 31, pp. 1192–1201.
- */
- float ran0(long *idum)
- {
- long k;
- float ans;
- /* *idum ^= MASK;*/ /* XORing with MASK allows use of zero and other */
- k=(*idum)/IQ; /* simple bit patterns for idum. */
- *idum=IA*(*idum-k*IQ)-IR*k; /* Compute idum=(IA*idum) % IM without over- */
- if (*idum < 0) *idum += IM; /* flows by Schrage’s method. */
- ans=AM*(*idum); /* Convert idum to a floating result. */
- /* *idum ^= MASK;*/ /* Unmask before return. */
- return ans;
- }
- /*
- 获得一个[0,1]之间均匀分布的随机数
- */
- float rand0_1()
- {
- return( ran0( &ran_seed ) );
- }
- /*
- 获得一个x - N(u,sigma)Gaussian分布的随机数
- */
- float randGaussian( float u, float sigma )
- {
- float x1, x2, v1, v2;
- float s = 100.0;
- float y;
- /*
- 使用筛选法产生正态分布N(0,1)的随机数(Box-Mulles方法)
- 1. 产生[0,1]上均匀随机变量X1,X2
- 2. 计算V1=2*X1-1,V2=2*X2-1,s=V1^2+V2^2
- 3. 若s<=1,转向步骤4,否则转1
- 4. 计算A=(-2ln(s)/s)^(1/2),y1=V1*A, y2=V2*A
- y1,y2为N(0,1)随机变量
- */
- while ( s > 1.0 )
- {
- x1 = rand0_1();
- x2 = rand0_1();
- v1 = 2 * x1 - 1;
- v2 = 2 * x2 - 1;
- s = v1*v1 + v2*v2;
- }
- y = (float)(sqrt( -2.0 * log(s)/s ) * v1);
- /*
- 根据公式
- z = sigma * y + u
- 将y变量转换成N(u,sigma)分布
- */
- return( sigma * y + u );
- }
- /*
- 初始化系统
- int x0, y0: 初始给定的图像目标区域坐标
- int Wx, Hy: 目标的半宽高
- unsigned char * img:图像数据,RGB形式
- int W, H: 图像宽高
- */
- int Initialize( int x0, int y0, int Wx, int Hy,
- unsigned char * img, int W, int H )
- {
- int i, j;
- float rn[7];
- set_seed( 0 ); /* 使用系统时钟作为种子,这个函数在 */
- /* 系统初始化时候要调用一次,且仅调用1次 */
- //NParticle = 75; /* 采样粒子个数 */
- //Pi_Thres = (float)0.90; /* 设置权重阈值 */
- states = new SPACESTATE [NParticle]; /* 申请状态数组的空间 */
- if ( states == NULL ) return( -2 );
- weights = new float [NParticle]; /* 申请粒子权重数组的空间 */
- if ( weights == NULL ) return( -3 );
- nbin = R_BIN * G_BIN * B_BIN; /* 确定直方图条数 */
- ModelHist = new float [nbin]; /* 申请直方图内存 */
- if ( ModelHist == NULL ) return( -1 );
- /* 计算目标模板直方图 */
- CalcuColorHistogram( x0, y0, Wx, Hy, img, W, H, ModelHist, nbin );
- /* 初始化粒子状态(以(x0,y0,1,1,Wx,Hy,0.1)为中心呈N(0,0.4)正态分布) */
- states[0].xt = x0;
- states[0].yt = y0;
- states[0].v_xt = (float)0.0; // 1.0
- states[0].v_yt = (float)0.0; // 1.0
- states[0].Hxt = Wx;
- states[0].Hyt = Hy;
- states[0].at_dot = (float)0.0; // 0.1
- weights[0] = (float)(1.0/NParticle); /* 0.9; */
- for ( i = 1; i < NParticle; i++ )
- {
- for ( j = 0; j < 7; j++ ) rn[j] = randGaussian( 0, (float)0.6 ); /* 产生7个随机高斯分布的数 */
- states[i].xt = (int)( states[0].xt + rn[0] * Wx );
- states[i].yt = (int)( states[0].yt + rn[1] * Hy );
- states[i].v_xt = (float)( states[0].v_xt + rn[2] * VELOCITY_DISTURB );
- states[i].v_yt = (float)( states[0].v_yt + rn[3] * VELOCITY_DISTURB );
- states[i].Hxt = (int)( states[0].Hxt + rn[4] * SCALE_DISTURB );
- states[i].Hyt = (int)( states[0].Hyt + rn[5] * SCALE_DISTURB );
- states[i].at_dot = (float)( states[0].at_dot + rn[6] * SCALE_CHANGE_D );
- /* 权重统一为1/N,让每个粒子有相等的机会 */
- weights[i] = (float)(1.0/NParticle);
- }
- return( 1 );
- }
- /*
- 计算归一化累计概率c'_i
- 输入参数:
- float * weight: 为一个有N个权重(概率)的数组
- int N: 数组元素个数
- 输出参数:
- float * cumulateWeight: 为一个有N+1个累计权重的数组,
- cumulateWeight[0] = 0;
- */
- void NormalizeCumulatedWeight( float * weight, float * cumulateWeight, int N )
- {
- int i;
- for ( i = 0; i < N+1; i++ )
- cumulateWeight[i] = 0;
- for ( i = 0; i < N; i++ )
- cumulateWeight[i+1] = cumulateWeight[i] + weight[i];
- for ( i = 0; i < N+1; i++ )
- cumulateWeight[i] = cumulateWeight[i]/ cumulateWeight[N];
- return;
- }
- /*
- 折半查找,在数组NCumuWeight[N]中寻找一个最小的j,使得
- NCumuWeight[j] <=v
- float v: 一个给定的随机数
- float * NCumuWeight: 权重数组
- int N: 数组维数
- 返回值:
- 数组下标序号
- */
- int BinearySearch( float v, float * NCumuWeight, int N )
- {
- int l, r, m;
- l = 0; r = N-1; /* extreme left and extreme right components' indexes */
- while ( r >= l)
- {
- m = (l+r)/2;
- if ( v >= NCumuWeight[m] && v < NCumuWeight[m+1] ) return( m );
- if ( v < NCumuWeight[m] ) r = m - 1;
- else l = m + 1;
- }
- return( 0 );
- }
- /*
- 重新进行重要性采样
- 输入参数:
- float * c: 对应样本权重数组pi(n)
- int N: 权重数组、重采样索引数组元素个数
- 输出参数:
- int * ResampleIndex:重采样索引数组
- */
- void ImportanceSampling( float * c, int * ResampleIndex, int N )
- {
- float rnum, * cumulateWeight;
- int i, j;
- cumulateWeight = new float [N+1]; /* 申请累计权重数组内存,大小为N+1 */
- NormalizeCumulatedWeight( c, cumulateWeight, N ); /* 计算累计权重 */
- for ( i = 0; i < N; i++ )
- {
- rnum = rand0_1(); /* 随机产生一个[0,1]间均匀分布的数 */
- j = BinearySearch( rnum, cumulateWeight, N+1 ); /* 搜索<=rnum的最小索引j */
- if ( j == N ) j--;
- ResampleIndex[i] = j; /* 放入重采样索引数组 */
- }
- delete cumulateWeight;
- return;
- }
- /*
- 样本选择,从N个输入样本中根据权重重新挑选出N个
- 输入参数:
- SPACESTATE * state: 原始样本集合(共N个)
- float * weight: N个原始样本对应的权重
- int N: 样本个数
- 输出参数:
- SPACESTATE * state: 更新过的样本集
- */
- void ReSelect( SPACESTATE * state, float * weight, int N )
- {
- SPACESTATE * tmpState;
- int i, * rsIdx;
- tmpState = new SPACESTATE[N];
- rsIdx = new int[N];
- ImportanceSampling( weight, rsIdx, N ); /* 根据权重重新采样 */
- for ( i = 0; i < N; i++ )
- tmpState[i] = state[rsIdx[i]];//temState为临时变量,其中state[i]用state[rsIdx[i]]来代替
- for ( i = 0; i < N; i++ )
- state[i] = tmpState[i];
- delete[] tmpState;
- delete[] rsIdx;
- return;
- }
- /*
- 传播:根据系统状态方程求取状态预测量
- 状态方程为: S(t) = A S(t-1) + W(t-1)
- W(t-1)为高斯噪声
- 输入参数:
- SPACESTATE * state: 待求的状态量数组
- int N: 待求状态个数
- 输出参数:
- SPACESTATE * state: 更新后的预测状态量数组
- */
- void Propagate( SPACESTATE * state, int N)
- {
- int i;
- int j;
- float rn[7];
- /* 对每一个状态向量state[i](共N个)进行更新 */
- for ( i = 0; i < N; i++ ) /* 加入均值为0的随机高斯噪声 */
- {
- for ( j = 0; j < 7; j++ ) rn[j] = randGaussian( 0, (float)0.6 ); /* 产生7个随机高斯分布的数 */
- state[i].xt = (int)(state[i].xt + state[i].v_xt * DELTA_T + rn[0] * state[i].Hxt + 0.5);
- state[i].yt = (int)(state[i].yt + state[i].v_yt * DELTA_T + rn[1] * state[i].Hyt + 0.5);
- state[i].v_xt = (float)(state[i].v_xt + rn[2] * VELOCITY_DISTURB);
- state[i].v_yt = (float)(state[i].v_yt + rn[3] * VELOCITY_DISTURB);
- state[i].Hxt = (int)(state[i].Hxt+state[i].Hxt*state[i].at_dot + rn[4] * SCALE_DISTURB + 0.5);
- state[i].Hyt = (int)(state[i].Hyt+state[i].Hyt*state[i].at_dot + rn[5] * SCALE_DISTURB + 0.5);
- state[i].at_dot = (float)(state[i].at_dot + rn[6] * SCALE_CHANGE_D);
- cvCircle(pTrackImg,cvPoint(state[i].xt,state[i].yt),3, CV_RGB(0,255,0),-1);
- }
- return;
- }
- /*
- 观测,根据状态集合St中的每一个采样,观测直方图,然后
- 更新估计量,获得新的权重概率
- 输入参数:
- SPACESTATE * state: 状态量数组
- int N: 状态量数组维数
- unsigned char * image: 图像数据,按从左至右,从上至下的顺序扫描,
- 颜色排列次序:RGB, RGB, ...
- int W, H: 图像的宽和高
- float * ObjectHist: 目标直方图
- int hbins: 目标直方图条数
- 输出参数:
- float * weight: 更新后的权重
- */
- void Observe( SPACESTATE * state, float * weight, int N,
- unsigned char * image, int W, int H,
- float * ObjectHist, int hbins )
- {
- int i;
- float * ColorHist;
- float rho;
- ColorHist = new float[hbins];
- for ( i = 0; i < N; i++ )
- {
- /* (1) 计算彩色直方图分布 */
- CalcuColorHistogram( state[i].xt, state[i].yt,state[i].Hxt, state[i].Hyt,
- image, W, H, ColorHist, hbins );
- /* (2) Bhattacharyya系数 */
- rho = CalcuBhattacharyya( ColorHist, ObjectHist, hbins );
- /* (3) 根据计算得的Bhattacharyya系数计算各个权重值 */
- weight[i] = CalcuWeightedPi( rho );
- }
- delete ColorHist;
- return;
- }
- /*
- 估计,根据权重,估计一个状态量作为跟踪输出
- 输入参数:
- SPACESTATE * state: 状态量数组
- float * weight: 对应权重
- int N: 状态量数组维数
- 输出参数:
- SPACESTATE * EstState: 估计出的状态量
- */
- void Estimation( SPACESTATE * state, float * weight, int N,
- SPACESTATE & EstState )
- {
- int i;
- float at_dot, Hxt, Hyt, v_xt, v_yt, xt, yt;
- float weight_sum;
- at_dot = 0;
- Hxt = 0; Hyt = 0;
- v_xt = 0; v_yt = 0;
- xt = 0; yt = 0;
- weight_sum = 0;
- for ( i = 0; i < N; i++ ) /* 求和 */
- {
- at_dot += state[i].at_dot * weight[i];
- Hxt += state[i].Hxt * weight[i];
- Hyt += state[i].Hyt * weight[i];
- v_xt += state[i].v_xt * weight[i];
- v_yt += state[i].v_yt * weight[i];
- xt += state[i].xt * weight[i];
- yt += state[i].yt * weight[i];
- weight_sum += weight[i];
- }
- /* 求平均 */
- if ( weight_sum <= 0 ) weight_sum = 1; /* 防止被0除,一般不会发生 */
- EstState.at_dot = at_dot/weight_sum;
- EstState.Hxt = (int)(Hxt/weight_sum + 0.5 );
- EstState.Hyt = (int)(Hyt/weight_sum + 0.5 );
- EstState.v_xt = v_xt/weight_sum;
- EstState.v_yt = v_yt/weight_sum;
- EstState.xt = (int)(xt/weight_sum + 0.5 );
- EstState.yt = (int)(yt/weight_sum + 0.5 );
- return;
- }
- /************************************************************
- 模型更新
- 输入参数:
- SPACESTATE EstState: 状态量的估计值
- float * TargetHist: 目标直方图
- int bins: 直方图条数
- float PiT: 阈值(权重阈值)
- unsigned char * img: 图像数据,RGB形式
- int W, H: 图像宽高
- 输出:
- float * TargetHist: 更新的目标直方图
- ************************************************************/
- # define ALPHA_COEFFICIENT 0.2 /* 目标模型更新权重取0.1-0.3 */
- int ModelUpdate( SPACESTATE EstState, float * TargetHist, int bins, float PiT,
- unsigned char * img, int W, int H )
- {
- float * EstHist, Bha, Pi_E;
- int i, rvalue = -1;
- EstHist = new float [bins];
- /* (1)在估计值处计算目标直方图 */
- CalcuColorHistogram( EstState.xt, EstState.yt, EstState.Hxt,
- EstState.Hyt, img, W, H, EstHist, bins );
- /* (2)计算Bhattacharyya系数 */
- Bha = CalcuBhattacharyya( EstHist, TargetHist, bins );
- /* (3)计算概率权重 */
- Pi_E = CalcuWeightedPi( Bha );
- if ( Pi_E > PiT )
- {
- for ( i = 0; i < bins; i++ )
- {
- TargetHist[i] = (float)((1.0 - ALPHA_COEFFICIENT) * TargetHist[i]
- + ALPHA_COEFFICIENT * EstHist[i]);
- }
- rvalue = 1;
- }
- delete EstHist;
- return( rvalue );
- }
- /*
- 系统清除
- */
- void ClearAll()
- {
- if ( ModelHist != NULL ) delete [] ModelHist;
- if ( states != NULL ) delete [] states;
- if ( weights != NULL ) delete [] weights;
- return;
- }
- /**********************************************************************
- 基于彩色直方图的粒子滤波算法总流程
- 输入参数:
- unsigned char * img: 图像数据,RGB形式
- int W, H: 图像宽高
- 输出参数:
- int &xc, &yc: 找到的图像目标区域中心坐标
- int &Wx_h, &Hy_h: 找到的目标的半宽高
- float &max_weight: 最大权重值
- 返回值:
- 成功1,否则-1
- 基于彩色直方图的粒子滤波跟踪算法的完整使用方法为:
- (1)读取彩色视频中的1帧,并确定初始区域,以此获得该区域的中心点、
- 目标的半高、宽,和图像数组(RGB形式)、图像高宽参数。
- 采用初始化函数进行初始化
- int Initialize( int x0, int y0, int Wx, int Hy,
- unsigned char * img, int W, int H )
- (2)循环调用下面函数,直到N帧图像结束
- int ColorParticleTracking( unsigned char * image, int W, int H,
- int & xc, int & yc, int & Wx_h, int & Hy_h )
- 每次调用的输出为:目标中心坐标和目标的半高宽
- 如果函数返回值<0,则表明目标丢失。
- (3)清除系统各个变量,结束跟踪
- void ClearAll()
- **********************************************************************/
- int ColorParticleTracking( unsigned char * image, int W, int H,
- int & xc, int & yc, int & Wx_h, int & Hy_h,
- float & max_weight)
- {
- SPACESTATE EState;
- int i;
- /* 选择:选择样本,并进行重采样 */
- ReSelect( states, weights, NParticle );
- /* 传播:采样状态方程,对状态变量进行预测 */
- Propagate( states, NParticle);
- /* 观测:对状态量进行更新 */
- Observe( states, weights, NParticle, image, W, H,
- ModelHist, nbin );
- /* 估计:对状态量进行估计,提取位置量 */
- Estimation( states, weights, NParticle, EState );
- xc = EState.xt;
- yc = EState.yt;
- Wx_h = EState.Hxt;
- Hy_h = EState.Hyt;
- /* 模型更新 */
- ModelUpdate( EState, ModelHist, nbin, Pi_Thres, image, W, H );
- /* 计算最大权重值 */
- max_weight = weights[0];
- for ( i = 1; i < NParticle; i++ )
- max_weight = max_weight < weights[i] ? weights[i] : max_weight;
- /* 进行合法性检验,不合法返回-1 */
- if ( xc < 0 || yc < 0 || xc >= W || yc >= H ||
- Wx_h <= 0 || Hy_h <= 0 ) return( -1 );
- else
- return( 1 );
- }
- //把iplimage 转到img 数组中,BGR->RGB
- void IplToImge(IplImage* src, int w,int h)
- {
- int i,j;
- for ( j = 0; j < h; j++ ) // 转成正向图像
- for ( i = 0; i < w; i++ )
- {
- img[ ( j*w+i )*3 ] = R(src,i,j);
- img[ ( j*w+i )*3+1 ] = G(src,i,j);
- img[ ( j*w+i )*3+2 ] = B(src,i,j);
- }
- }
- void mouseHandler(int event, int x, int y, int flags, void* param)//在这里要注意到要再次调用cvShowImage,才能显示方框
- {
- CvMemStorage* storage = cvCreateMemStorage(0);
- CvSeq * contours;
- IplImage* pFrontImg1 = 0;
- int centerX,centerY;
- int delt = 10;
- pFrontImg1=cvCloneImage(pFrontImg);//这里也要注意到如果在 cvShowImage("foreground",pFrontImg1)中用pFrontImg产效果,得重新定义并复制
- switch(event){
- case CV_EVENT_LBUTTONDOWN:
- //printf("laskjfkoasfl\n");
- //寻找轮廓
- if(pause)
- {
- cvFindContours(pFrontImg,storage,&contours,sizeof(CvContour),CV_RETR_EXTERNAL,
- CV_CHAIN_APPROX_SIMPLE);
- //在原场景中绘制目标轮廓的外接矩形
- for (;contours;contours = contours->h_next)
- {
- CvRect r = ((CvContour*)contours)->rect;
- if(x>r.x&&x<(r.x+r.width)&&y>r.y&&r.y<(r.y+r.height))
- {
- if (r.height*r.width>CONTOUR_MIN_AREA && r.height*r.width<CONTOUR_MAX_AREA)
- {
- centerX = r.x+r.width/2;//得到目标中心点
- centerY = r.y+r.height/2;
- WidIn = r.width/2;//得到目标半宽与半高
- HeiIn = r.height/2;
- xin = centerX;
- yin = centerY;
- cvRectangle(pFrontImg1,cvPoint(r.x,r.y),cvPoint(r.x+r.width,r.y+r.height),cvScalar(255,255,255),2,8,0);
- //Initial_MeanShift_tracker(centerX,centerY,WidIn,HeiIn,img,Wid,Hei,1./delt); //初始化跟踪变量
- /* 初始化跟踪器 */
- Initialize( centerX, centerY, WidIn, HeiIn, img, Wid, Hei );
- track = true;//进行跟踪
- cvShowImage("foreground",pFrontImg1);
- return;
- }
- }
- }
- }
- break;
- case CV_EVENT_LBUTTONUP:
- printf("Left button up\n");
- break;
- }
- }
- //void on_mouse(int event, int x, int y, int flags, void *param)
- //{
- // if(!image)
- // return ;
- // if(image->origin)
- // {
- // image->origin = 0;
- // y = image->height - y;
- // }
- // if(selecting) //正在选择物体
- // {
- // selection.x = MIN(x,origin.x);
- // selection.y = MIN(y,origin.y);
- // selection.width = selection.x + CV_IABS(x - origin.x);
- // selection.height = selection.y + CV_IABS(y - origin.y);
- //
- // selection.x = MAX(selection.x ,0);
- // selection.y = MAX(selection.y,0);
- // selection.width = MIN(selection.width,image->width);
- // selection.height = MIN(selection.height,image->height);
- // selection.width -= selection.x;
- // selection.height -= selection.y;
- // }
- // switch(event)
- // {
- // case CV_EVENT_LBUTTONDOWN:
- // origin = cvPoint(x,y);
- // selection = cvRect(x,y,0,0);
- // selecting = 1;
- // break;
- // case CV_EVENT_LBUTTONUP:
- // selecting = 0;
- // if(selection.width >0 && selection.height >0)
- // selected = 1;
- // break;
- // }
- //}
- void main()
- {
- int FrameNum=0; //帧号
- int k=0;
- CvCapture *capture = cvCreateFileCapture("test.avi");
- char res1[20],res2[20];
- //CvCapture *capture = cvCreateFileCapture("test1.avi");
- //CvCapture *capture = cvCreateFileCapture("camera1_mov.avi");
- IplImage* frame[Num]; //用来存放图像
- int i,j;
- uchar key = false; //用来设置暂停
- float rho_v;//表示相似度
- float max_weight;
- int sum=0; //用来存放两图像帧差后的值
- for (i=0;i<Num;i++)
- {
- frame[i]=NULL;
- }
- IplImage *curFrameGray=NULL;
- IplImage *frameGray=NULL;
- CvMat *Mat_D,*Mat_F; //动态矩阵与帧差后矩阵
- int row ,col;
- cvNamedWindow("video",1);
- cvNamedWindow("background",1);
- cvNamedWindow("foreground",1);
- cvNamedWindow("tracking",1);
- cvSetMouseCallback("tracking",mouseHandler,0);//响应鼠标
- while (capture)
- {
- curframe=cvQueryFrame(capture); //抓取一帧
- if(FrameNum<Num)
- {
- if(FrameNum==0)//第一帧时初始化过程
- {
- curFrameGray=cvCreateImage(cvGetSize(curframe),IPL_DEPTH_8U,1);
- frameGray=cvCreateImage(cvGetSize(curframe),IPL_DEPTH_8U,1);
- pBackImg=cvCreateImage(cvGetSize(curframe),IPL_DEPTH_8U,1);
- pFrontImg=cvCreateImage(cvGetSize(curframe),IPL_DEPTH_8U,1);
- pTrackImg = cvCreateImage(cvGetSize(curframe),IPL_DEPTH_8U,3);
- cvSetZero(pFrontImg);
- cvCvtColor(curframe,pBackImg,CV_RGB2GRAY);
- row=curframe->height;
- col=curframe->width;
- Mat_D=cvCreateMat(row,col,CV_32FC1);
- cvSetZero(Mat_D);
- Mat_F=cvCreateMat(row,col,CV_32FC1);
- cvSetZero(Mat_F);
- Wid = curframe->width;
- Hei = curframe->height;
- img = new unsigned char [Wid * Hei * 3];
- }
- frame[k]=cvCloneImage(curframe); //把前num帧存入到图像数组
- pTrackImg = cvCloneImage(curframe);
- }
- else
- {
- k=FrameNum%Num;
- pTrackImg = cvCloneImage(curframe);
- IplToImge(curframe,Wid,Hei);
- cvCvtColor(curframe,curFrameGray,CV_RGB2GRAY);
- cvCvtColor(frame[k],frameGray,CV_RGB2GRAY);
- for(i=0;i<curframe->height;i++)
- for(j=0;j<curframe->width;j++)
- {
- sum=S(curFrameGray,j,i)-S(frameGray,j,i);
- sum=sum<0 ? -sum : sum;
- if(sum>T) //文献中公式(1)
- {
- CV_MAT_ELEM(*Mat_F,float,i,j)=1;
- }
- else
- {
- CV_MAT_ELEM(*Mat_F,float,i,j)=0;
- }
- if(CV_MAT_ELEM(*Mat_F,float,i,j)!=0)//文献中公式(2)
- CV_MAT_ELEM(*Mat_D,float,i,j)=Re;
- else{
- if(CV_MAT_ELEM(*Mat_D,float,i,j)!=0)
- CV_MAT_ELEM(*Mat_D,float,i,j)=CV_MAT_ELEM(*Mat_D,float,i,j)-1;
- }
- if(CV_MAT_ELEM(*Mat_D,float,i,j)==0.0)
- {
- //文献中公式(3)
- S(pBackImg,j,i)=(uchar)((1-ai)*S(pBackImg,j,i)+ai*S(curFrameGray,j,i));
- }
- sum=S(curFrameGray,j,i)-S(pBackImg,j,i);//背景差分法
- sum=sum<0 ? -sum : sum;
- if(sum>40)
- {
- S(pFrontImg,j,i)=255;
- }
- else
- S(pFrontImg,j,i)=0;
- }
- frame[k]=cvCloneImage(curframe);
- }
- FrameNum++;
- k++;
- cout<<FrameNum<<endl;
- //进行形态学滤波,去噪
- cvDilate(pFrontImg, pFrontImg, 0, 2);
- cvErode(pFrontImg, pFrontImg, 0, 3);
- cvDilate(pFrontImg, pFrontImg, 0, 1);
- if(track)
- {
- /* 跟踪一帧 */
- rho_v = ColorParticleTracking( img, Wid, Hei, xout, yout, WidOut, HeiOut, max_weight);
- /* 画框: 新位置为蓝框 */
- if ( rho_v > 0 && max_weight > 0.0001 ) /* 判断是否目标丢失 */
- {
- cvRectangle(pFrontImg,cvPoint(xout - WidOut,yout - HeiOut),cvPoint(xout+WidOut,yout+HeiOut),cvScalar(255,255,255),2,8,0);
- cvRectangle(pTrackImg,cvPoint(xout - WidOut,yout - HeiOut),cvPoint(xout+WidOut,yout+HeiOut),cvScalar(255,255,255),2,8,0);
- xin = xout; yin = yout;
- WidIn = WidOut; HeiIn = HeiOut;
- /*draw_rectangle( pBuffer, Width, Height, xo, Height-yo-1, wo, ho, 0x00ff0000, 2 );
- xb = xo; yb = yo;
- wb = wo; hb = ho;*/
- }
- }
- cvShowImage("video",curframe);
- cvShowImage("foreground",pFrontImg);
- cvShowImage("background",pBackImg);
- cvShowImage("tracking",pTrackImg);
- /*sprintf(res1,"fore%d.jpg",FrameNum);
- cvSaveImage(res1,pFrontImg);
- sprintf(res2,"ground%d.jpg",FrameNum);
- cvSaveImage(res2,pBackImg);*/
- cvSetMouseCallback("foreground",mouseHandler,0);//响应鼠标
- key = cvWaitKey(1);
- if(key == 'p') pause = true;
- while(pause)
- if(cvWaitKey(0)=='p')
- pause = false;
- }
- cvReleaseImage(&curFrameGray);
- cvReleaseImage(&frameGray);
- cvReleaseImage(&pBackImg);
- cvReleaseImage(&pFrontImg);
- cvDestroyAllWindows();
- // Clear_MeanShift_tracker();
- ClearAll();
- }
实验结果:

自此,毕业论文涉及的经典算法已经全部给出,我自己提出的破算法就不献丑了。
马上去华为上班咯,可能搞通信去了,破企业网部门,唉
如果周末有空的话,我还是会继续搞图像处理的,这次下了不少人脸美化、超分辨率修正的论文,得好好读读。
另外打个广告,我毕业前自己弄得android app《色盲相机》,下载地址:
木蚂蚁:http://www.mumayi.com/android-631836.html
360: http://zhushou.360.cn/detail/index/soft_id/1780912
网易: http://m.163.com/android/software/32jkam.html
核心思想来自斯坦福大学的课程设计及一个日本老头公开的matlab代码
有空大家给我点点广告哈~~

















 760
760

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









