






2021年6月1日
常用的采集手机GNSS观测数据的软件:
1.GNSSLogger:有两个版本,一个是在github上维护的开源版本;还有一个是在谷歌应用商店中,非开源,这个是“谷歌分米挑战赛”采集数据的版本。
2.Geo++ Rinex Logger:非开源,版本很久没有更新。
3.GPStest:开源,作者还在持续更新版本,但代码采用Kotlin和JAVA混合方式编写。
4.GNSS/IMU Android Logger:开源软件,可以输出rinex格式的文件。
5.***
2021年12月10日
1.GEO++ RINEX logger
采集数据生成的文件格式rinex3.03
头中:
G:GPS
R:格洛纳斯
E:伽利略
C:北斗
J:日本准天顶星
2021年12月29日
可以查看gnss文件数据类型
https://cddis.nasa.gov/Data_and_Derived_Products/GNSS/hourly_30second_data.html
2022年4月8日
波长λ=光速C/频率f
2022年4月13日
BDS2:5颗地球静止轨道卫星,7颗倾斜地球轨道卫星和3颗中圆轨道卫星
BDS3:24颗中圆轨道卫星,3颗倾斜地球轨道卫星,3颗地球静止轨道卫星
星座信息http://csno-tarc.cn/system/constellation
2022年8月11日
1.星间单差:选取参考星的一般策略是选择卫星高度角最大的卫星,由于卫星高度角最高,理论上卫星观测数据受大气延迟、多路径效应等误差影响最小,构建模型由参考星引入的误差也最小。
2.PPP中对流层延迟:对流层属于非弥散性介质,折射率与电磁波的频率无关。当观测时间较短、气候较稳定时,每个测站只引入一个天顶方向的对流层湿延迟参数,优点是引入的参数少。斜干延迟通过天顶对流层干延迟参数和干延迟投影函数改正,大气中干分量的影响占对流层总延迟的90%左右,湿分量的影响比干分量小很多,约占对流层总延迟的10%左右。
3.PPP中电离层延迟:电离层属于弥散性介质,不同频率的电磁波有不同的传播速度。电离层延迟取决于信号传播过程中的电子总量和信号频率,总电子含量为沿着卫星信号传播路径对电子密度进行积分所获得的结果,对同一电离层而言,从某一测站至各卫星的方向上的总电子含量值是不同的。
2022年8月13日
rtklib中的矩阵以列优先为原则进行存储,以差分定位中udpos中的状态向量时间更新的系数F为例:
F=eye(nx);
/*动态模式,且开启pos1-dynamics,此时F为一个9*9的单位矩阵,如(1)所示
(1)F=
1 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 1
*/
for (i=0;i<6;i++) {
F[i+(i+3)*nx]=tt;//F[27]、F[37]、F[47]、F[57]、F[67]、F[77]、....
}
/* include accel terms if filter is converged */
if (var < rtk->opt.thresar[1]) {
for (i = 0; i < 3; i++) {
F[i + (i + 6) * nx] = SQR(tt) / 2.0;//F[54]、F[64]、F[74]
}
}
else trace(3, "pos var too high for accel term\n");
/*
构造出完整的F矩阵,如(2)所示
(2)F=
1 0 0 tt 0 0 tt*tt/2 0 0
0 1 0 0 tt 0 0 tt*tt/2 0
0 0 1 0 0 tt 0 0 tt*tt/2
0 0 0 1 0 0 tt 0 0
0 0 0 0 1 0 0 tt 0
0 0 0 0 0 1 0 0 tt
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 1
*/
如果以行优先的话,与速度相关的系数应该分别为F[3]、F[13]、F[23]、F[33]、…,与加速度有关的矩阵应该分别为F[6]…,明显是不符合构造过程的。
2022年8月17日
在多系统精密定位中,由于不同的系统具有不同的硬件延迟和时间基准,通过使用两种方法来处理接收机的时钟偏差,一是为每个参与运算的引入独立的接收机钟差参数;二是估计一个系统的接收机钟差和系统间偏差参数。
2022年8月24日
GNSS卫星钟差通常是以某一个指定观测值或某两个频率的消电离层组合观测值为基准。
广播星历卫星钟差基准:BDS是B3I、GPS是P1/P2消电离层组合、galileo是E1/E5a消电离层组合。
2022年8月31日
GPS L1频率是由其卫星上的原子钟所产生的基准频率f0(f0=10.23MHz)的154倍形成
2022年9月16日
BDS-2卫星的伪距观测数据中存在与高度角负相关引起的系统偏差,这种偏差又被称为北斗伪距偏差,初步认为是由于北斗的星上多路径引起。北斗三号试验卫星不存在与高度角相关的伪距偏差。
2022年10月17日
频间钟差IFCB参数一般仅对三频GPS卫星进行估计或改正。
三频精密单点定位:
IF1213模型:需要在第一和第三频率的无电离层组合方程中,伪距的方程增加一个频间偏差IFB(我的初始化方案0.1 900)参数,相位的方程增加一个频间钟差IFCB参数。
UC123模型:需要在第三个频率的伪距方程中增加频间偏差IFB参数,在相位方程中增加频间钟差IFCB参数。
IF123模型:在组合的相位观测值中增加一个频间钟差IFCB参数。
PPP浮点解E方向的定位精度不如N方向的定位精度可能存在的原因:1.E方向与相位模糊度的相关度更高;2.卫星运行方向的影响,GNSS卫星在地心地固坐标系中运行轨迹一般为南北方向,因此E方向的卫星分布要弱于N方向。
2022年11月28日
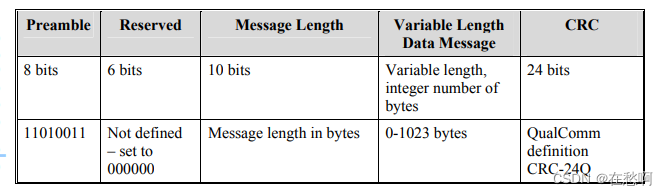
RTCM3报文帧结构:

















 290
290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









