






计算机视觉研究院专栏
作者:Edison_G
在过去的十年里,在目标检测方面取得了重大进展,这些目标通常以大规模变化和任意方向分布。然而,现有的大多数方法依赖于具有不同尺度、角度和长宽比的启发式定义anchor,通常在anchor boxes和axis-aligned的卷积特征之间存在严重的不对准,这导致分类分数和定位精度之间存在的共同不一致。
公众号ID|ComputerVisionGzq
学习群|扫码在主页获取加入方式
源码| 回复“SSA”获取论文下载

一、简要
为了解决这个问题,有研究者提出了一个Single-shot Alignment Network(S2A-Net),由两个模块组成:一个特征对齐模块(FAM)和一个定向检测模块(ODM)。FAM可以通过anchor优化网络生成高质量的anchor,并根据anchor boxes与新提出的对齐卷积来自适应对齐卷积特征。ODM首先采用主动active rotating filters对方向信息进行编码,然后产生方向敏感和方向不变的特征,以缓解分类分数与定位精度之间的不一致性。此外,研究者还进一步探索了在大尺寸图像中检测物体的方法,从而在速度和精度之间进行了更好的权衡。
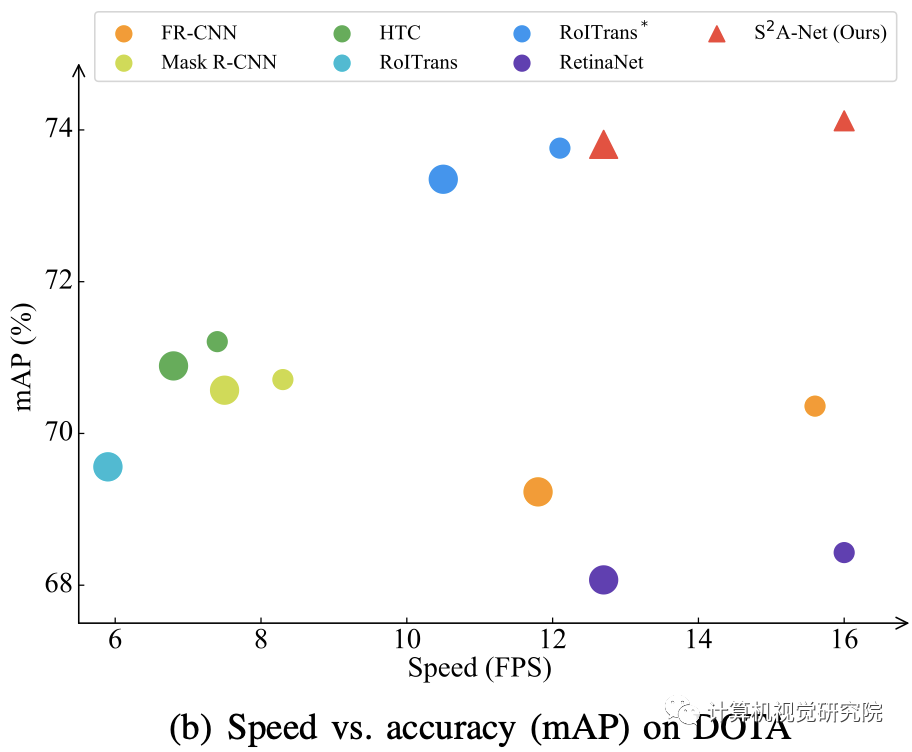
大量的实验表明,新提出的方法可以在两个常用的数据集(DOTA和HRSC2016)上达到最先进的性能,同时保持高效率!
二、背景
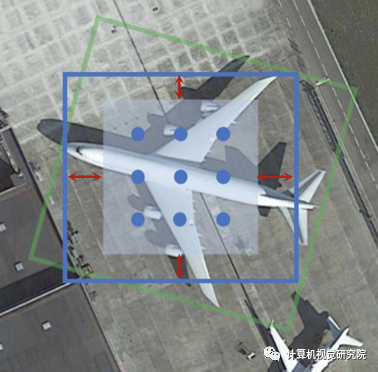
与基于R-CNN的探测器相比,one-stage探测器回归边界框,并直接用常规和密集的采样anchor对它们进行分类。这种架构具有很高的计算效率,但在精度上往往落后于[G.-S. Xia, X. Bai, J. Ding, Z. Zhu, S. Belongie, J. Luo, M. Datcu, M. Pelillo, and L. Zhang, “DOTA: A large-scale dataset for object detection in aerial images,” in CVPR, 2018]。如下图所示,认为one-stage探测器出现严重错位。
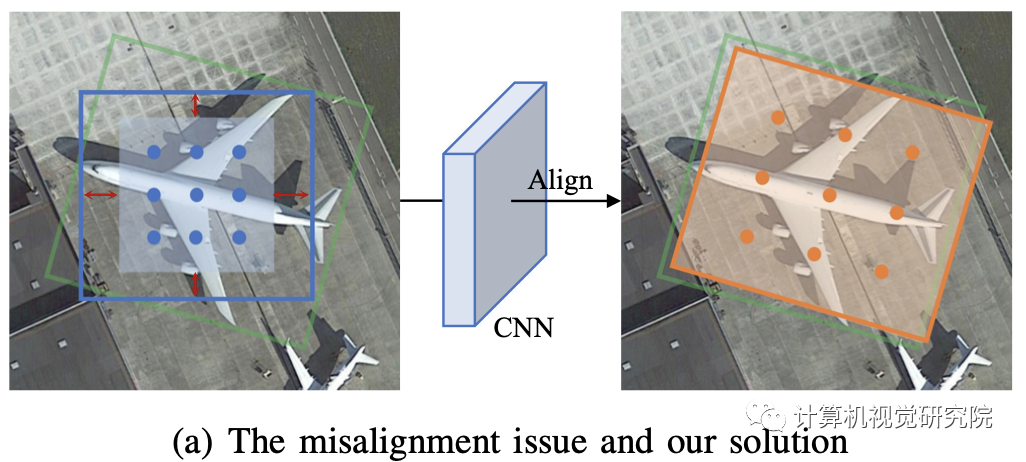
启发式定义的anchor质量低,不能覆盖目标,导致目标和anchor之间的错位。例如,桥的展宽比通常在1/3到1/30之间,只有少数anchor甚至没有anchor可以校准。这种错位通常加剧前景背景类的不平衡,阻碍性能。
主干网络的卷积特征通常与固定的接受场进行轴对齐,而航空图像中的目标则以任意的方向和不同的外观进行分布。即使是anchor boxes被分配给具有高可信度的实例(即IoU),anchor boxes与卷积特征之间仍然存在错位。换句话说,anchor boxes的相应特征在某种程度上难以表示整个目标。结果,最终的分类分数不能准确地反映定位精度,这也阻碍了后处理阶段的检测性能(如NMS)。
相同设置下不同方法的性能比较
三、新框架分析
















 4246
4246











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











