






点击蓝字
关注我们
关注并星标
从此不迷路
计算机视觉研究院

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
计算机视觉研究院专栏
Column of Computer Vision Institute
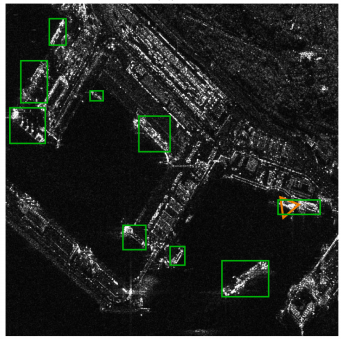
随着深度学习技术的应用,合成孔径雷达(SAR)在船舶目标检测中得到了广泛应用。然而,在某些复杂环境下,如近岸区域或存在小型船舶的场景中,仍然存在误检和漏检的问题。
PART/1
概述
为了解决这些问题,本文提出了一种名为 -YOLO的高精度船舶目标检测方法,该方法以YOLOv7-tiny为基础网络构建。所提出的方法主要包括以下步骤:首先,引入基于可变形卷积网络的特征提取增强网络,以获取各类船舶更全面的特征表示;其次,提出一种基于 BiFormer 注意力机制的自适应特征识别方法,以提高检测精度,这更有助于捕捉近岸船舶和小型船舶;第三,提出一种基于动态非单调聚焦机制的优化交并比(IoU)方法来生成损失函数,从而提高收敛速度和泛化能力。因此,DBW-YOLO方法能够训练出一个更强大的模型,该模型能更好地利用近岸船舶和小型船舶的样本。为了验证该方法的有效性,使用了两个合成孔径雷达数据集,即高分辨率合成孔径雷达图像数据集(HRSID)和舰船目标检测数据集(SSDD)来进行性能评估。与其他广泛使用的方法相比,DBW-YOLO方法在 HRSID 数据集和SSDD数据集上的平均精度均值(mAP)分别达到了88.84%和99.18%。研究结果表明,DBW-YOLO方法在精度和整体性能方面均优于其他具有代表性的合成孔径雷达船舶检测方法。
PART/2
背景
目标检测作为一项基础的视觉任务,旨在识别物体的类别并定位其位置。它在众多应用领域有着广泛用途,如智能安防、自动驾驶、机器人导航以及医学诊断等。高性能
传统的合成孔径雷达(SAR)船舶检测方法以恒虚警率(CFAR)及其改进方法为代表。这些方法通常依赖于利用海上目标与背景之间的差异。当目标的先验信息未知时,恒虚警率检测方法因其较强的散射回波能够取得较好的检测效果。然而,由于它们对背景复杂性较为敏感,且对目标变化的适应性不足,随着雷达平台参数的多样性增加以及模型复杂度的提升,其检测效果较差。
近年来,由于深度学习的快速发展,SAR 船舶检测取得了显著进展。这是因为深度学习技术在从 SAR 图像中提取复杂特征方面表现出了优异的性能,并且具有很强的泛化能力,这极大地提高了 SAR 船舶检测的精度和整体性能。深度学习技术根据阶段数量可分为两类:单阶段检测器和两阶段检测器。你只看一次(YOLO)和单次多框检测器(SSD)是最受欢迎的两种单阶段检测器,而 R-CNN]、快速 R-CNN和更快的R-CNN则是两阶段检测器的代表。然而,两阶段检测器存在船舶识别速度较慢的缺点,而单阶段检测器虽然检测速度较快,但精度适中。
因此,基于单阶段检测器已经开发出了许多有建设性的改进方法。例如,Wang 等人为SSD模型引入了一种增强的SAR检测方法,该方法结合了数据增强和迁移技术。Tang等人展示了一种N-YOLO模型,以减少噪声和海岸线对船舶识别的影响。Sun等人提出了一种基于YOLO的创新方法用于任意方向的SAR船舶检测,名为BiFA-YOLO,以充分利用特征融合和角度分类。Li等人提出了一种结合汇流算法的YOLOv5模型,用于在复杂环境(如近岸或船只过于密集的情况)中检测船舶。Yang等人引入了一种名为改进的FCOS的无锚点检测方法,以解决多分辨率和近岸环境中的目标检测问题。Bai等人提出了一种FEPS-Net,以优化在存在大量散射噪声和小型船只情况下的船舶检测性能。Chen等人提出了一种CSD-YOLO模型,该模型集成了混洗注意力机制和空洞空间金字塔池化,以应对在复杂环境中检测各种船舶的挑战。Ren等人提出了YOLO-Lite,这是一种高效的轻量级网络,用于解决船舶检测中目标定位不准确以及受复杂背景干扰的问题。
尽管在探索提高船舶检测性能方面有许多很有前景的思路,但最先进的算法模型在近岸区域或小型船只等环境中仍然面临误报和漏检的挑战。这是因为:
1)对于文献中提出的方法,这些模型的特征提取网络无法生成纯净的船舶特征,使得它们容易受到周围环境的干扰,特别是对于纹理复杂或尺寸较小的目标,会导致检测精度下降;
2)对于文献,这些模型向网络中引入了全局注意力机制,导致资源消耗巨大和计算负担加重,这阻碍了模型的部署和实际应用;
3)上述所有模型在计算边界框时都没有考虑到高质量锚框与低质量样本产生的有害梯度之间的竞争。在检测近岸船只和小型船只的情况下,它们可能表现不佳,导致定位错误。
为了解决这些问题,设计一种平衡的SAR船舶检测方法至关重要且有益,该方法既能提高检测精度,又能确保在复杂环境中实现实时检测和识别。因此,我们基于YOLOv7-tiny提出了一种名为DBW-YOLO的新型船舶检测方法,该方法集成了 DCNets、BiFormer 和Wise IoU,以提高船舶检测精度。主要贡献概述如下:
1)为了提高检测速度,本文选择YOLOv7-tiny作为DBW-YOLO方法的基础网络,在确保精度要求的同时实现了更快的检测速度。
2)为了提高检测精度,在D-ELAN下采样模块中采用了DCNets,这提高了特征提取能力。
3)为了提高对近岸和小型船只的检测精度,将具有两层路由机制的动态稀疏注意力BiFormer集成到网络中,这有助于捕捉近岸和小型船只。
4)为了提高泛化能力和收敛速度,采用WIoU作为带有动态非单调聚焦机制的损失函数,这有助于更有效地进行网络训练。
PART/3
新方法解释
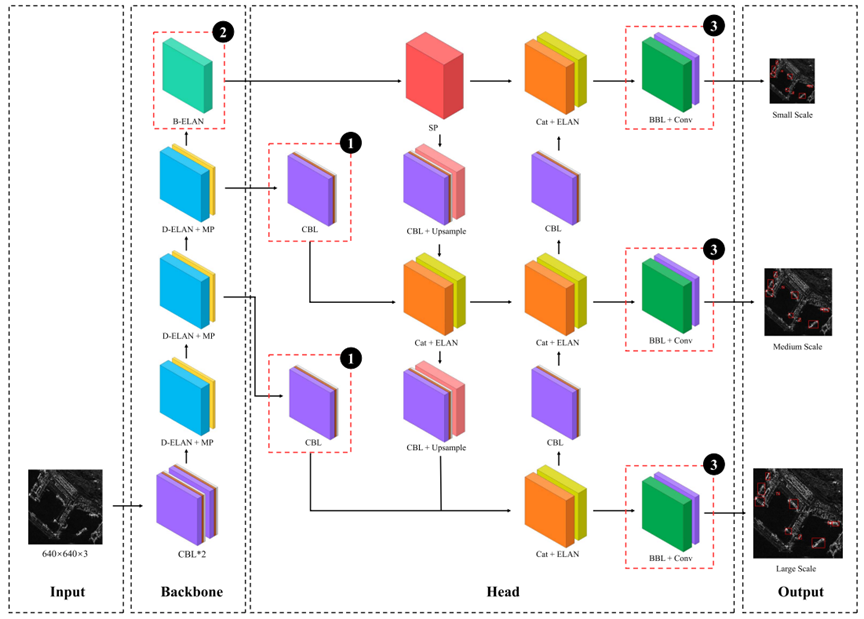
该方法的网络主要由负责提取图像特征的主干网络和用于识别目标类别和锚框的头部网络组成。下图展示了DBW-YOLO网络结构的概述。
其构建步骤如下:
1. 主干网络:DBW-YOLO主干网络受YOLOv7-tiny的启发,集成了卷积块(CBL)、D-ELAN模块、B-ELAN模块和最大池化块(MP 块)。使用两个CBL块对输入图像进行初始特征提取,同时使用MP块进行下采样操作以降低特征图的维度。这两个块的结构与YOLOv7-tiny中的保持不变。为了从图像中充分提取船舶特征,我们在主干网络中专门设计了两个新颖的模块,即D-ELAN和B-ELAN。D-ELAN模块基于原始YOLOv7-tiny框架中的ELAN模块构建,并通过集成DCNet进行了增强,以便更有效地提取船舶特征。B-ELAN模块是D-ELAN模块的进一步改进版本,它融合了ELAN模块、DcNets和BiFormer注意力卷积,能够更好地聚焦于近岸船舶和小型船舶的检测。D-ELAN和B-ELAN在主干网络中插入的位置如上图 所示。
2. 头部网络:DBW-YOLO头部网络由空间金字塔块(SP 块)、特征金字塔网络(FPN)结构和BiFormer块(BBL)组成。SP块用于更全面地提取特征,防止图像失真和冗余特征提取。采用FPN结构来实现有效的特征融合,有助于在多个尺度上识别目标。这些综合措施显著提高了模型准确识别和定位船舶的能力。如上图中位置3所示,在特征融合的末端策略性地添加了三个BBL块。这些添加提高了特征表示能力,并增强了我们方法的整体性能和鲁棒性。因此,不同尺度的特征图被无缝集成到检测网络中。
3. 其他细节:提出了马赛克(mosaic)和混合(mixup)方法的数据增强技术,以有效提高模型的泛化能力并扩展数据集。使用WIoU作为损失函数来优化网络,从而提高收敛速度和检测性能。
B. 组件
DBW-YOLO方法主要由以下四个组件组成,即YOLOv7-tiny、DCNets、BiFormer和WIoU,具体如下:
1. YOLOv7-Tiny:YOLOv7是Wang等人推出的YOLO系列检测器的最新版本之一。它以其高效的实时目标检测能力而闻名,具有快速的推理速度和较低的计算复杂度,这使其非常适合实时应用,并且在处理大型数据集时表现出色。根据代码的不同运行环境,包括云GPU、普通GPU 和边缘GPU,它被分为三个模型,即YOLOv7-w6、YOLOv7和YOLOv7-tiny。与YOLOv7和YOLOv7-w6相比,YOLOv7-tiny具有更紧凑的模型尺寸和更低的计算要求,使其非常适合计算资源有限的场景。此外,YOLOv7-tiny在处理速度方面往往优于其他模型,使其非常适合需要高实时性的场景。因此,本文选择YOLOv7-tiny作为DBW-YOLO方法的基础模型。
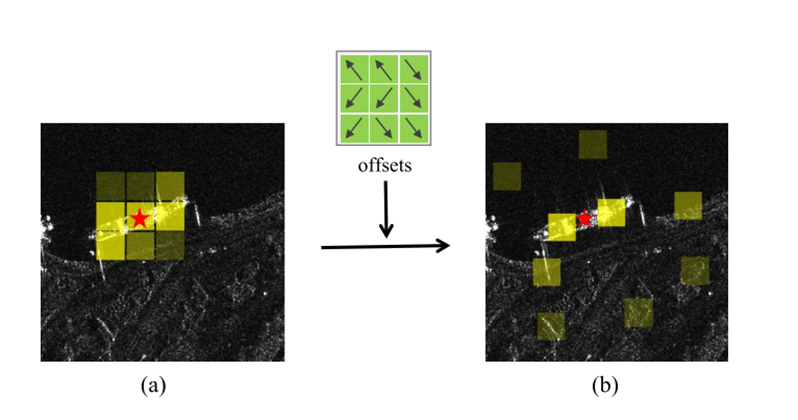
可变形卷积网络(DCNets):与采用固定形状内核的传统卷积不同,DCNets在标准卷积中引入了二维偏移量,使网络能够灵活调整其形状,如下图所示。最新版本的DCNets由Wang等人提出。
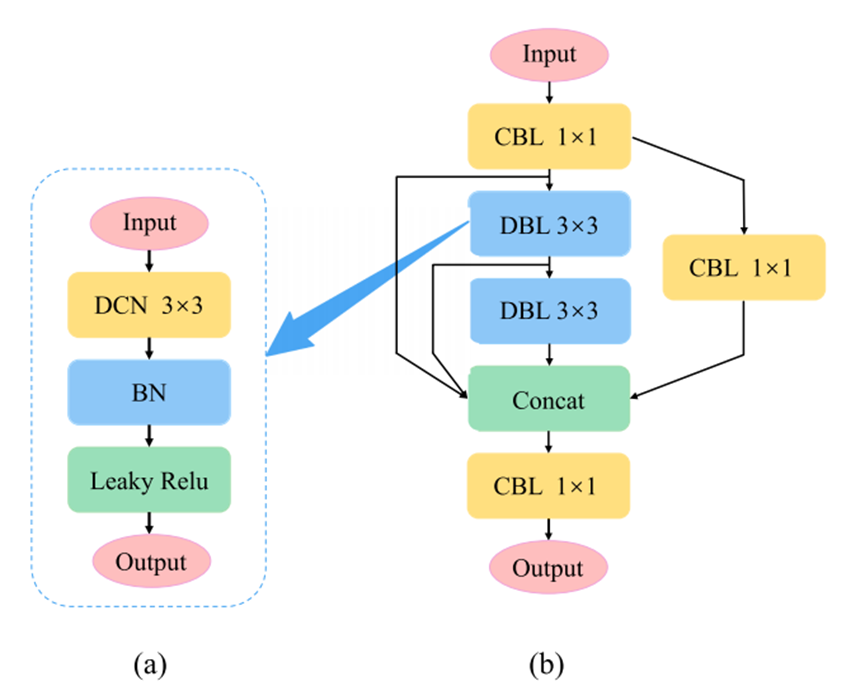
YOLOv7的特征提取网络采用3×3标准卷积,在固定位置对输入特征图进行采样。然而,在处理近岸船舶时,卷积往往会提取大量的背景信息,从而影响网络识别船舶目标的能力。在本节中,为了获得有价值的船舶特征,在DCNets的辅助下设计了两种特征学习增强结构,即DBL块和D-ELAN模块。这解决了传统卷积在近岸船舶目标方面的局限性。通过广泛的实验分析和验证,这种网络结构被证明更适合于SAR船舶目标的特征提取。DBL块和D-ELAN模块的结构细节如下图所示。
通过针对各种船舶目标优化卷积,DCNets不仅增强了网络的特征提取能力,还显著提高了模型的效率和检测性能。主要方面如下:
1.为了优化船舶特征的提取能力,设计了一个DBL块,它用DCNets替换了CBL块中原来的3×3标准卷积。然后,我们使用批量归一化来建立权重关系,并使用Leaky ReLU激活函数来捕捉更复杂的特征。
2.为了增强网络的特征学习能力和鲁棒性,通过在原始ELAN模块中插入两个DBL块创建了一个D-ELAN模块。这些DBL块替换了相应的原始CBL块。通过这种设计,主干网络中的三个ELAN模块被D-ELAN模块替换,以提高整体性能。
3.为了确定DCNets的合适扩展率,进行了严格的对比实验以获得最佳参数。
1、BiFormer:对于SAR目标检测方法,注意力机制通常被纳入网络以增强特征提取。然而,这往往会导致大量的资源消耗和计算负担,给模型的部署和应用带来挑战。在本节中,引入了BiFormer注意力机制以有效地提取图像特征。它采用双层路由注意力作为核心构建模块,这减少了巨大的计算负担并实现了灵活的计算。通过应用BiFormer注意力机制,引入了另外两种特征学习增强结构,即BBL块和B-ELAN模块,以充分利用船舶目标的独特特征。这提高了识别小目标特征的性能,同时降低了计算负载。主要方面概述如下:
为了增强卷积识别船舶特征的能力,引入了带有BiFormer注意力机制的BBL块。与DBL块类似,BBL块中用3×3的BiFormer注意力卷积替换了CBL块中的3×3标准卷积,其详细结构如下图 (a) 所示。如前所述,在替换了原来的CBL块后,该块与一个1×1标准卷积一起被纳入头部网络的位置3处。
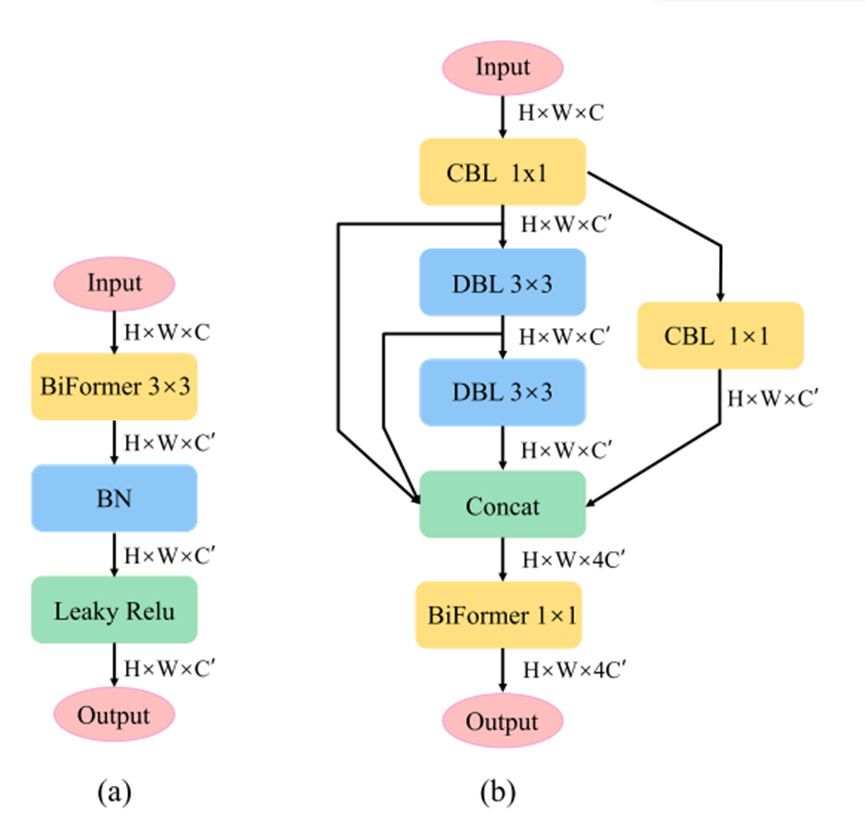
2、为了提高主干网络识别近岸船舶和小型船舶的准确性,基于D-ELAN模块和BiFormer注意力卷积设计了一个B-ELAN模块,如上图(b)所示。D-ELAN模块中最后的1×1标准卷积被替换为1×1的BiFormer注意力卷积,这更有利于捕捉近岸船舶和小型船舶。
3、B-ELAN模块与D-ELAN模块共同构成了主干网络的核心组件。这些协同增强显著提高了模型的检测精度和整体性能。
4、WIoU:边界框回归(BBR)损失函数在船舶检测中具有重要意义。因此,在本节中引入了一种WIoU损失函数,用于从周围背景中识别船舶。与传统的完全交并比(CIoU)损失函数不同,WIoU损失函数引入了一种动态非单调聚焦机制,这提高了收敛速度和泛化能力。使用WIoU时,在目标框的计算中,高质量锚框之间的竞争以及低质量样本产生的有害梯度的影响都显著降低了。从概率角度来看,WIoU提高了模型的泛化能力。
PART/4
实验及结果
实验环境
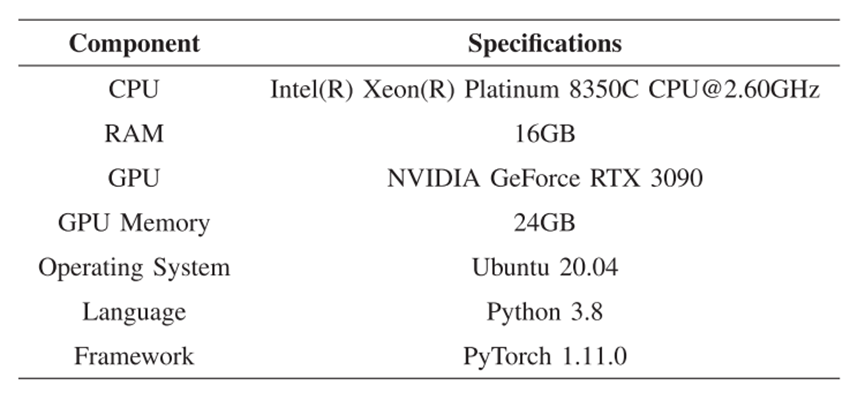
全面概述了本文所使用的实验设置
实验对比与分析
为了评估DBW-YOLO方法的性能,我们进行了一系列实验,这些实验涉及对对比模型的激活函数和各种网络结构进行修改。这些结果可以进一步指导模型的优化。
我们在所有实验中都使用HRSID数据集,并保持统一的实验设置:训练200个轮次(epochs),使用随机梯度下降(SGD)优化器,初始学习率为0.01,批量大小为64,输入图像大小为640×640像素。
1. 可变形卷积网络(DCNets)的效果:为了增强卷积识别船舶特征的能力,我们将改进版本的DCNets融入到YOLOv7-tiny的原始ELAN块中。不同的扩展率对DCNets的性能有显著影响,如下图所示的平均精度(AP)曲线所示。
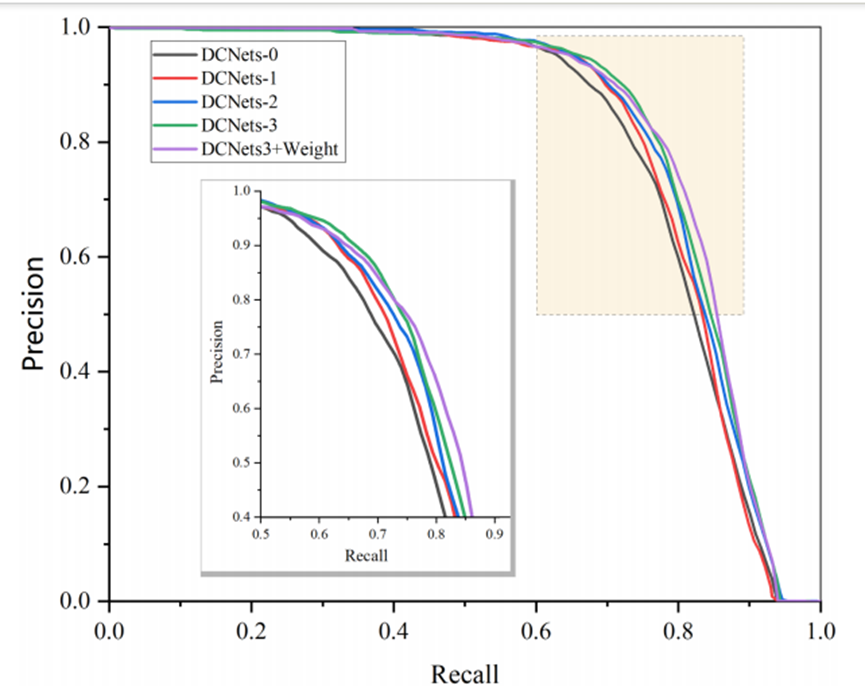
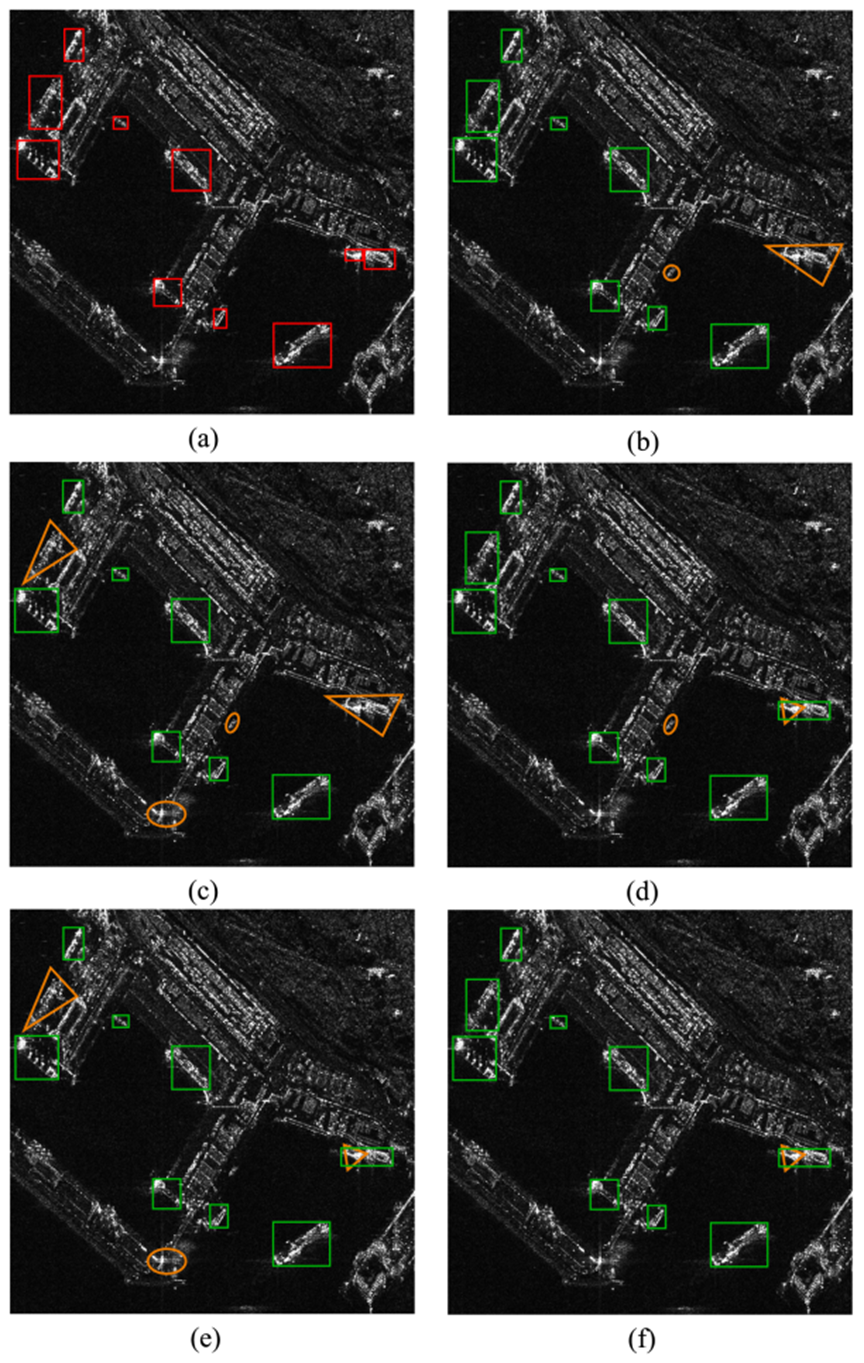
与其他船舶检测模型的比较:为了评估DBW-YOLO在SAR图像上强大的检测能力,我们在相同的条件和参数设置下,将其与四种广泛使用的SAR船舶检测模型(SSD、Faster R-CNN、YOLOv5-s和YOLOv7-tiny)进行了对比分析。使用HRSID和SSDD这两个数据集来评估性能。对比结果见表五和表六,DBW-YOLO与其他模型在 HRSID 数据集上的性能修正比较如下图所示。
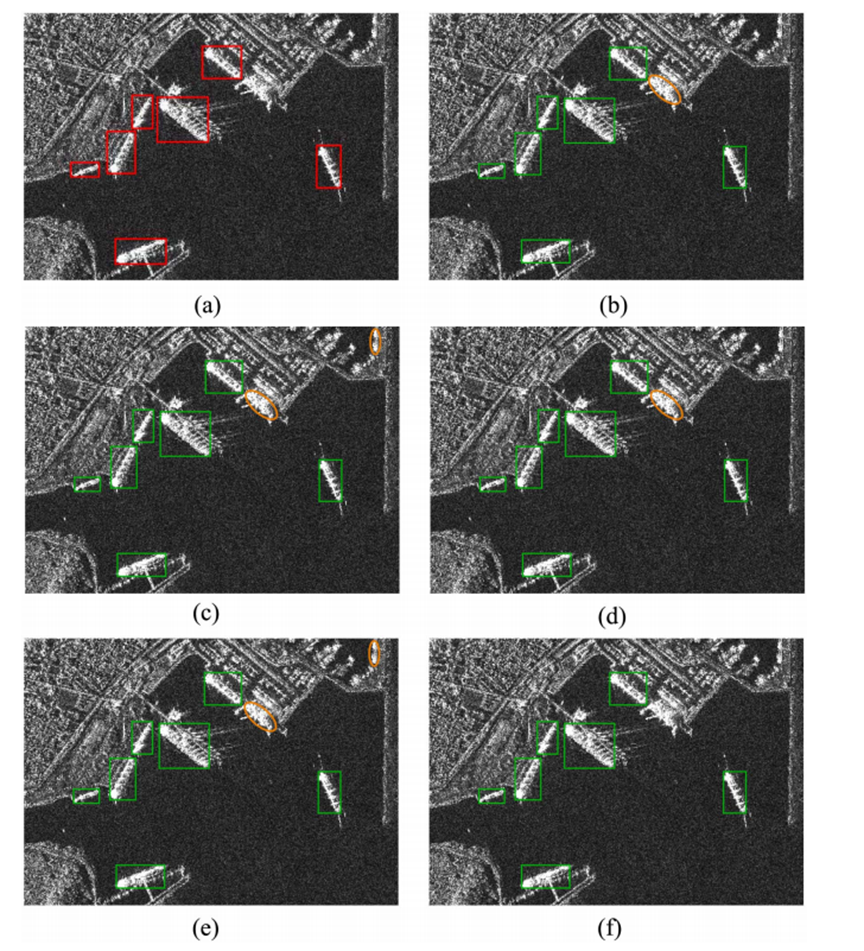
在SSDD数据集上的类似比较如下图所示。
PART/5
结论
本文介绍了一种用于合成孔径雷达船舶检测的DBW-YOLO检测方法。它在检测近岸船舶和小型船舶等复杂环境方面表现良好。使用HRSID和SSDD数据集,将DBW-YOLO的性能与其他广泛使用的船舶检测方法(即 SSD、Faster R-CNN、YOLOv5-s和YOLOv7-tiny)进行了比较。具体而言,DBW-YOLO 在 HRSID 数据集上的mAP达到了88.84%,在SSDD数据集上达到了99.18%,这证明了DBW-YOLO方法在检测精度方面的优越性。
此外,与其他模型相比,DBW-YOLO的精确率和召回率有了显著提高,这证明了我们的方法在鲁棒性方面具有优越的性能。总体而言,DBW-YOLO表现出强大的性能,尤其是在检测合成孔径雷达图像中的近岸船舶和小型船只方面,使其非常适合对高精度检测能力有要求的任务。然而,我们也认识到DBW-YOLO方法存在计算负担过重以及在资源受限环境中检测精度不足的问题。因此,在未来的工作中,我们将更加关注模型的轻量化设计和无锚点算法。
有相关需求的你可以联系我们!


END

转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
计算机视觉研究院主要涉及深度学习领域,主要致力于目标检测、目标跟踪、图像分割、OCR、模型量化、模型部署等研究方向。研究院每日分享最新的论文算法新框架,提供论文一键下载,并分享实战项目。研究院主要着重”技术研究“和“实践落地”。研究院会针对不同领域分享实践过程,让大家真正体会摆脱理论的真实场景,培养爱动手编程爱动脑思考的习惯!
往期推荐
🔗


















 105
105

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











