







1.坐标映射算法
坐标映射旨在建立投影图像与计算机放映图像之间的坐标映射关系,如图所示。

图: 坐标映射关系示意图
上图中,左边图像为摄像头采集到的投影图像,右边图像为计算机的放映图像,在投影图像中检测出激光点的位置后,需要将其映射到计算机放映图像中的对应点,从而确定后续交互行为的分析,如鼠标点击的位置,绘图标注的位置等。坐标映射关系一般在预处理阶段通过训练确定,首先投影特征图像,获得投影图像与计算机放映图像匹配特征点作为训练数据,假设有个匹配点和,然后训练一种参数模型得到坐标映射关系。
在激光笔交互系统中,摄像头摆放位置需要视具体应用场景而定,采集的投影图像相对于计算机放映图像,可能会产生一定程度的旋转、平移以及尺度上的变化,且会受到光照条件的影响;另外摄像头的摆放位置较偏僻、投影变换失真、弧形投影屏幕等因素,会造成采集的投影图像出现非线性畸变,因此坐标映射算法应该对上述问题具有鲁棒性。下面分别介绍现有的匹配点提取算法和所用的参数模型。
2.匹配点提取
利用棋盘图像作为特征图像,然后利用Harris角点检测算法检测投影图像和放映图像的角点,获得匹配特征点


图: 棋盘图像 (a)采集投影图像 (b)计算机放映图像
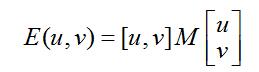
Harris利用角点在水平和垂直方向均有较大灰度值变化来检测角点,首先定义图像窗口移动微小量[u,v]后的灰度变化量为:

其中 

其中

其中det(M)为矩阵M的行列式值,tr(M)为矩阵M的迹,k为权重,取值为0.04~0.5,Th为角点检测的阈值。
利用Harris角点检测可以准确检测出棋盘图像中的角点,然而并不能将投影图像与相应的计算机放映图像的角点相匹配,因此会得到错误的匹配数据。
3.参数模型
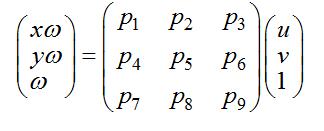
假定投影屏幕是平的,并且摄像头采集的投影图像没有产生任何畸变,进而利用单应性(Homography)建模坐标映射关系:

其中p=(p1,...,p9)为模型参数,其模值归一化为1,(u,v)和(x,y)为采集的投影图像与计算机放映图像的匹配点。将转化为矩阵形式:
由于模型参数的模值归一化为1,因此模型参数的自由度为8,只要有四组匹配点即可求出参数,当获得的匹配点多于四组时,采用最小二乘拟合的方法求出模型参数,假定匹配点为
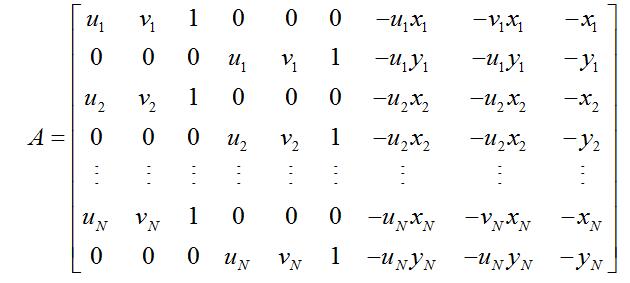
则模型参数可以通过求解下式优化问题获得最小二乘解:

上式的最优解为矩阵AT*A最小特征值对应的特征向量。
考虑到交互中常用的投影屏幕为弧形屏幕,因此在单应性的基础上,增加了二次项来建模坐标映射关系,其表达式为:
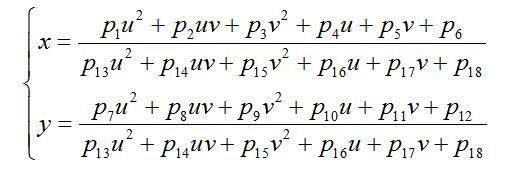
进而将其转化为矩阵形式:
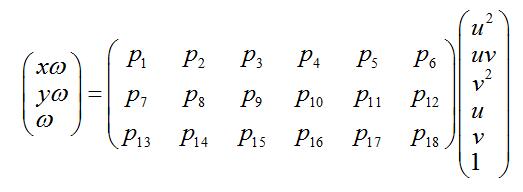
然后利用与相同的方式求解参数的最小二乘解。为模型增加二次项可以一定程度上解决弧形投影屏幕问题,然而该模型并不能解决任意的非线性畸变,因此利用该二次模型建模坐标映射关系,仍然会带来误差,进而影响激光笔交互的性能。
参考文献:
[1] 徐一华, 李善青, 贾云得. 一种基于视觉的手指屏幕交互方法[J]. 电子学报, 2007, 35(11): 2236-2240.
[2] Harris C, Stephens M. A combined corner and edge detector[C]. Manchester: Alvey vision conference. 1988.
[3] Sukthankar R, Stockton R G, Mullin M D. Smarter presentations: Exploiting homography in camera-projector systems[C]. Vancouver, Canada: Computer Vision, 2001.















 88
88

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









