






利用光流法计算人体运动的速度与方向
1.方向的计算
首先计算图像各个象素的光流(opencv LK),然后建立4*4窗口对X,Y方向分别做统计求和,
然后求得 atan(yy/xx)作为光流方向,即为运动的方向.
2.速度的计算
利用帧差分得到运动图像,然后建立4*4窗口对图像进行统计求和,求和值作为权重,表示速度的比例.
即运动区域白色(255)面积越大,速度越大.
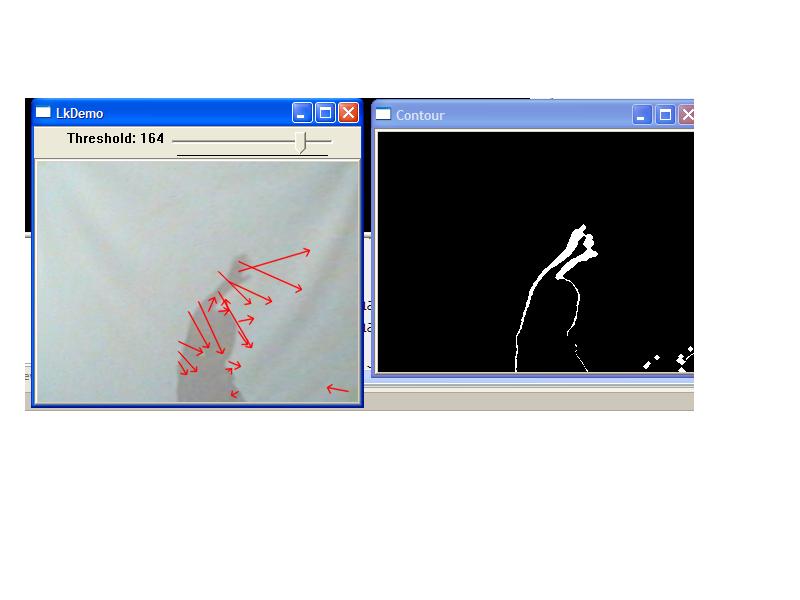
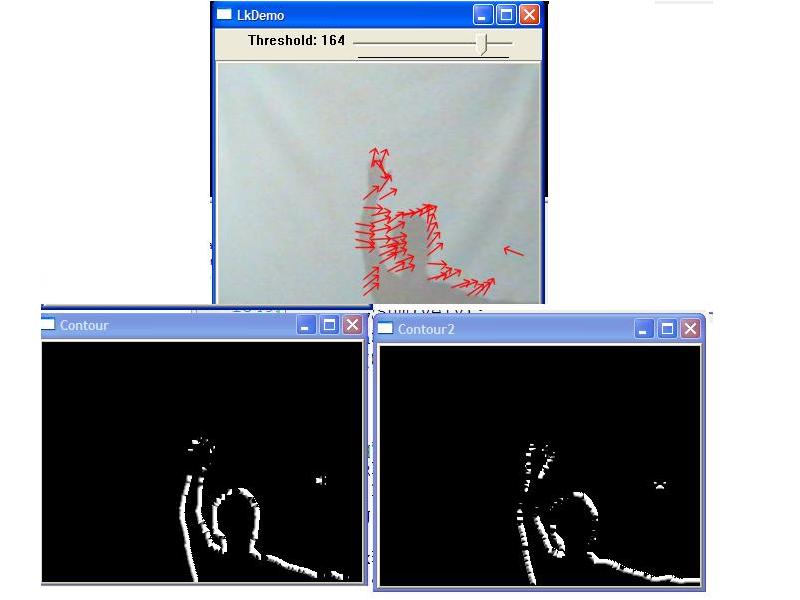
3.结果
大部分运动方向计算正确,少部分有错误,还需要改进算法.(利用统计?)
4.代码:
WW_RETURN HumanMotion::ImgOpticalFlow(IplImage *pre_grey,IplImage *grey)
/*************************************************
Function:
Description: 光流法计算运动速度与方向
Date: 2006-6-14
Author:
Input:
Output:
Return:
Others:
*************************************************/
{
IplImage *velx = cvCreateImage( cvSize(grey->width ,grey->height),IPL_DEPTH_32F, 1 );
IplImage *vely = cvCreateImage( cvSize(grey->width ,grey->height),IPL_DEPTH_32F, 1 );
velx->origin = vely->origin = grey->origin;
CvSize winSize = cvSize(5,5);
cvCalcOpticalFlowLK( prev_grey, grey, winSize, velx, vely );
cvAbsDiff( grey,prev_grey, abs_img );
cvThreshold( abs_img, abs_img, 29, 255, CV_THRESH_BINARY);
CvScalar xc,yc;
for(int y =0 ;y<velx->height; y++)
for(int x =0;x<velx->width;x++ )
{
xc = cvGetAt(velx,y,x);
yc = cvGetAt(vely,y,x);
float x_shift= (float)xc.val[0];
float y_shift= (float)yc.val[0];
const int winsize=5; //计算光流的窗口大小
if((x%(winsize*2)==0) && (y%(winsize*2)==0) )
{
if(x_shift!=0 || y_shift!=0)
{
if(x>winsize && y>winsize && x <(velx->width-winsize) && y<(velx->height-winsize) )
{
cvSetImageROI( velx, cvRect( x-winsize, y-winsize, 2*winsize, 2*winsize));
CvScalar total_x = cvSum(velx);
float xx = (float)total_x.val[0];
cvResetImageROI(velx);
cvSetImageROI( vely, cvRect( x-winsize, y-winsize, 2*winsize, 2*winsize));
CvScalar total_y = cvSum(vely);
float yy = (float)total_y.val[0];
cvResetImageROI(vely);
cvSetImageROI( abs_img, cvRect( x-winsize, y-winsize, 2*winsize, 2*winsize));
CvScalar total_speed = cvSum(abs_img);
float ss = (float)total_speed.val[0]/(4*winsize*winsize)/255;
cvResetImageROI(abs_img);
const double ZERO = 0.000001;
const double pi = 3.1415926;
double alpha_angle;
if(xx<ZERO && xx>-ZERO)
alpha_angle = pi/2;
else
alpha_angle = abs(atan(yy/xx));
if(xx<0 && yy>0) alpha_angle = pi - alpha_angle ;
if(xx<0 && yy<0) alpha_angle = pi + alpha_angle ;
if(xx>0 && yy<0) alpha_angle = 2*pi - alpha_angle ;
CvScalar line_color;
float scale_factor = ss*100;
line_color = CV_RGB(255,0,0);
CvPoint pt1,pt2;
pt1.x = x;
pt1.y = y;
pt2.x = static_cast<int>(x + scale_factor*cos(alpha_angle));
pt2.y = static_cast<int>(y + scale_factor*sin(alpha_angle));
cvLine( image, pt1, pt2 , line_color, 1, CV_AA, 0 );
CvPoint p;
p.x = (int) (pt2.x + 6 * cos(alpha_angle - pi / 4*3));
p.y = (int) (pt2.y + 6 * sin(alpha_angle - pi / 4*3));
cvLine( image, p, pt2, line_color, 1, CV_AA, 0 );
p.x = (int) (pt2.x + 6 * cos(alpha_angle + pi / 4*3));
p.y = (int) (pt2.y + 6 * sin(alpha_angle + pi / 4*3));
cvLine( image, p, pt2, line_color, 1, CV_AA, 0 );
/*
line_color = CV_RGB(255,255,0);
pt1.x = x-winsize;
pt1.y = y-winsize;
pt2.x = x+winsize;
pt2.y = y+winsize;
cvRectangle(image, pt1,pt2,line_color,1,CV_AA,0);
*/
}
}
}
}
cvShowImage( "Contour", abs_img);
cvShowImage( "Contour2", vely);
cvReleaseImage(&velx);
cvReleaseImage(&vely);
cvWaitKey(20);
return WW_OK;
}

















 877
877

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









