









sort
卡尔曼滤波
通俗理解
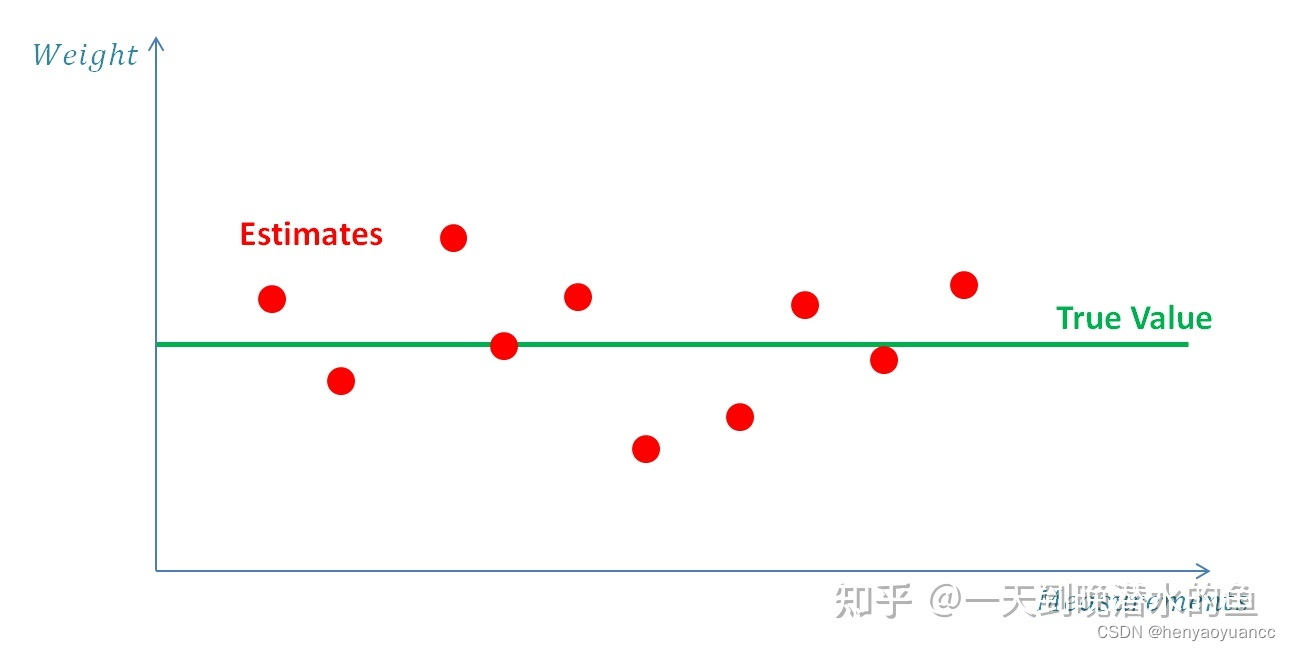
一个估计金条重量的例子
我们先从一个简单的例子开始,在这个例子中我们将会去估计一个静态系统,所谓静态系统就是在一定的时间内其状态不会改变的系统。在这个例子中,我们将估计一个金条的重量。首先假设我们使用的是一个无偏差的秤,也就是没有系统误差,但是测量值是包含随机误差的。这里的系统就是金条,系统的状态就是金条的重量。系统的动态模型是恒定的,因为我们假设金条的重量在短时间内不会发生变化。为了估计系统的状态,我们可以进行多次测量,然后对测量值求平均。
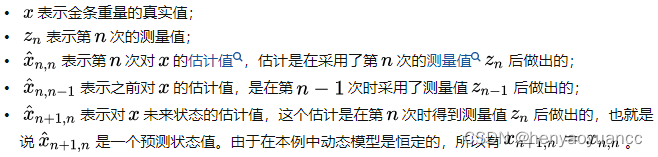
经过N次测量,估计值是之前所有测量值的平均值:

在上式中,
对上式做一下变换



该式就是卡尔曼滤波的状态转移方程,xhead(N,N)是第N次的预测状态,Zn是测量值,1/N是卡尔曼系数,卡尔曼系数越大,代表信任测量值多一些。
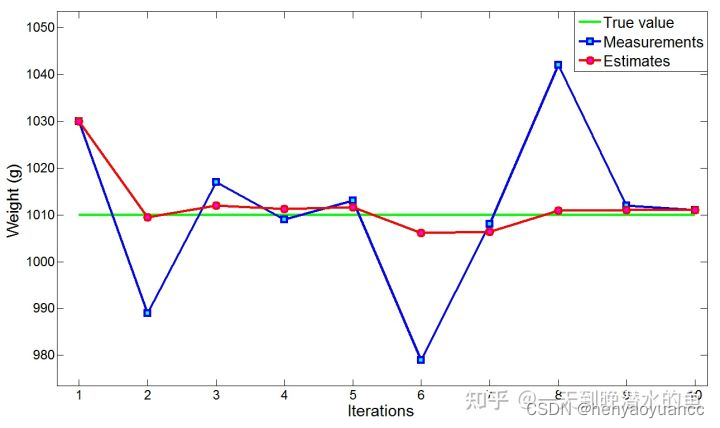
通过这样的步骤,可以看到,使用估计值后,金条重量变化曲线更平稳,这也是卡尔曼滤波的直观意义
公式理解
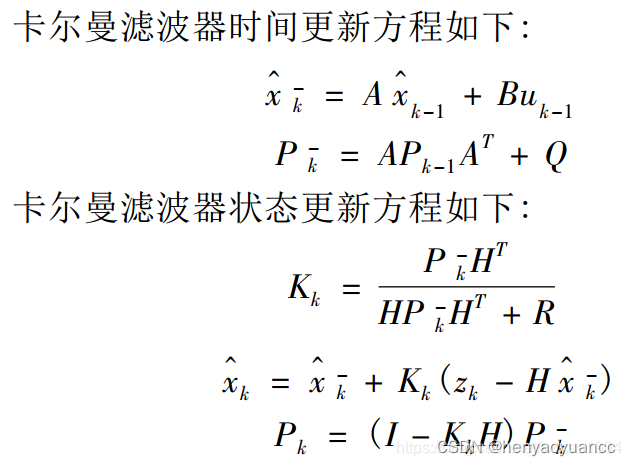
前两个公式是时间更新方程,也叫预测方程。x是观测状态矩阵,p是协方差矩阵,无论是预测值、测量值都是有误差的。预测值本来就是基于一个不确定的值,经过转移方程预测的,因此预测值(下图橙色)不确定性更大(更胖,方差更大)。
下图中的观测值是小车位置,小车位置到底在哪里呢,卡尔曼系数也就是综合这两个分布确定小车的位置(下图绿色),两个高斯分布计算后得出的分布(下图绿色),方差也更小了。
怎么通俗理解呢,天气预报(预测值)说今天七点到九点有雨,我们现在测量一下云的移动速度,云应该八点到十点左右飘到我们头顶上空,基于这两个分布,我们会说今天九点左右下雨的可能性很大。九点是经过卡尔曼系数加权综合得出的观测值(四式),而九点左右的“左右”就是方差,也要经过卡尔曼系数计算(五式),综合后时间区变小了,估计方差小了,与下图绿色分布较窄意义相同。公式四和五就是得出一个新的正态分布啊(均值和方差)
简言之,公式一二,预测一个正态分布,公式三四五,更新一个正态分布!

匈牙利匹配
跟踪还要解决的一个问题是预测框(卡尔曼滤波公式一的预测信息),和当前帧的检测框匹配问题,以进一步判断,哪些轨迹跟上了,哪些丢失了,出现了那些新轨迹等
匈牙利算法是解决二分图最大匹配问题的算法。
首先,要明确什么是二分图。二分图就是被划分为两个部分的特殊的图,两个集合分别记为A和B。无论是A还是B,同一个集合里面的任意两点都不能有连线,而只能是A中的点去与B中的点相连。
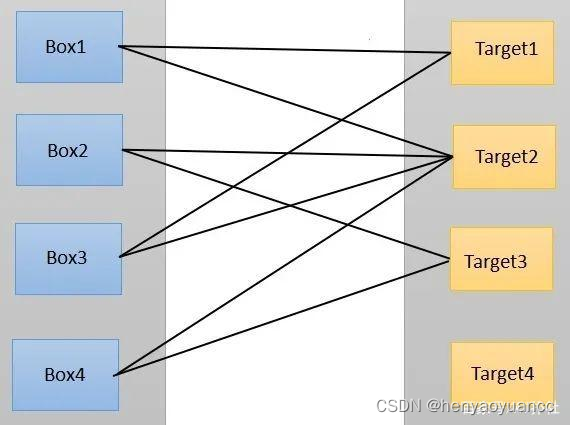
所谓二分图的最大匹配问题,可以看下图。在目标跟踪问题中,假设某一帧的视频中,有四个检测框Box,在这一帧有4个目标Target,中间连接的黑色实线表示:Box和Target有很大的可能是同一个目标(两点之间没有连线表示它们是同一个目标的置信度小于阈值,或者说我们认为二者不是同一个目标)。我们要做的是给检测出的Box尽可能匹配更多的Target。下面我们用匈牙利算法求解这个问题。
首先,初始状态下没有任何点是匹配的。我们给Box1分配给最近的Target1。
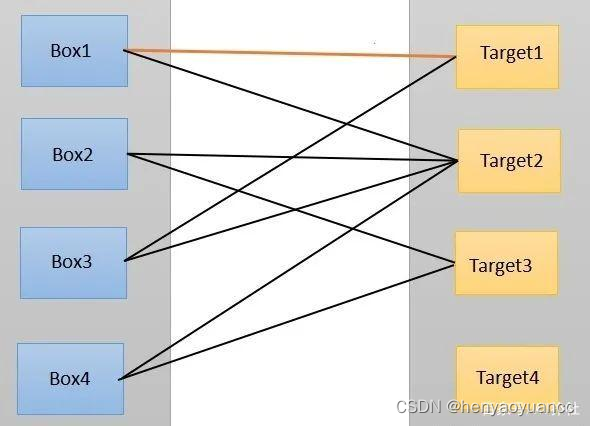
然后,我们看Box2,发现最近的Target2也没有被匹配到,因此给Box2分配给Target2。
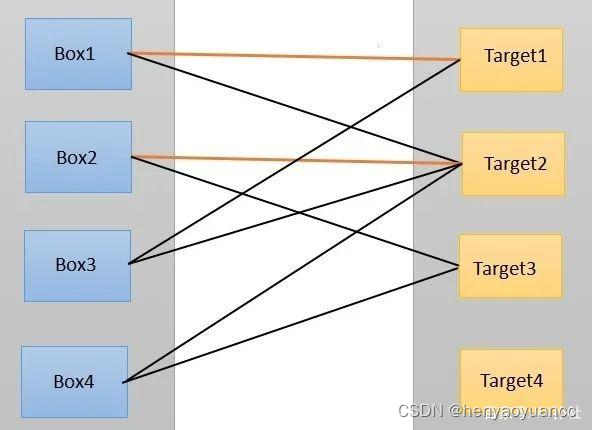
当我们匹配Box3的时候,发现可能与Box3是同一目标的只有Target1和2,但是它们都被匹配上了,怎么办呢?匈牙利算法的思想是:让Box1换个目标匹配试试,给Box3腾个地方,看看行不行。于是,我们让Box1的目标匹配成Target2,但因为Target2也已经被Box2匹配了,所以我们用同样的思想,让Box2也腾个地方,选择另一个目标Target3:
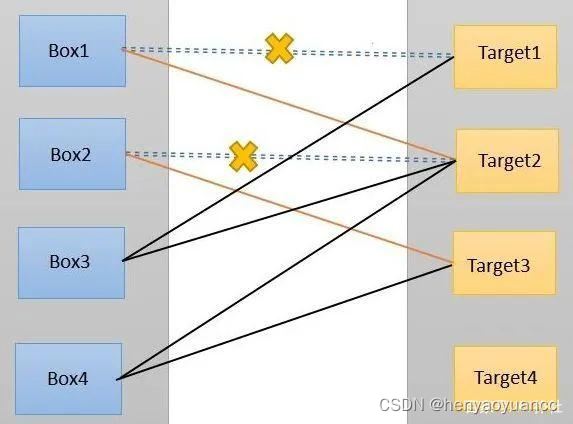
因此,我们发现Target1的地方被腾出来了,Box3恰好可以匹配这Target1,所以把Box3和Target1连线。
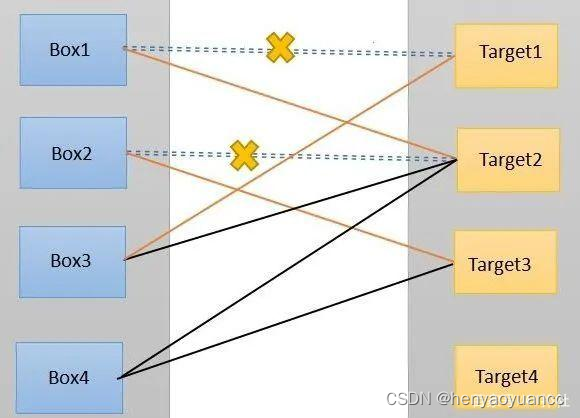
我们再尝试给Box4匹配Target时,发现Target3和Target3都被匹配上了。而Box1、Box2和Box3已经没有多余的位置可腾出来了,因此我们没有办法给Box4安排一个可以匹配的目标。至此,匈牙利算法结束,匹配的最终结果为(Box1, Target2),(Box2, Target3),(Box3, Target1),代表着当前帧中检测框和目标的最大匹配。















 506
506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









