







开始之前明确一个东西裸机程序和RTOS程序的差别:参考下面三个连接瞅瞅
理解实时操作系统与裸机的区别-----Free RTOS 简介_书中倦客的博客-CSDN博客_裸机操作系统
裸机与RTOS的理解和并发带来的问题-电子发烧友网 (elecfans.com)
类似于STM32之类的单片机,RTOS比裸机真有那么大优势? (baidu.com)
总得来说呢,就是RTOS会损失部分DSP的运算效率,建议还是开发裸机程序吧。
DSP_基于TMS320F28335和CCS7.2的编程入门_heqiunong的博客-CSDN博客
在上一篇关于DSP的文章中,我们讲到了TMS320F28335芯片的编程入门,这款芯片是单核的,而本文涉及的TMS320F28377D是多核的。那么单核和多核编程直接是啥区别呢?对于TMS320F28377D,我感觉网上的资料不多,而且之前从来没有多核编程的经验,回想当初,我还是有些许的害怕的,其实掌握了还是很简单的,下面记录一下单核到多核的摸索之路。不要慌,循序渐进即可。
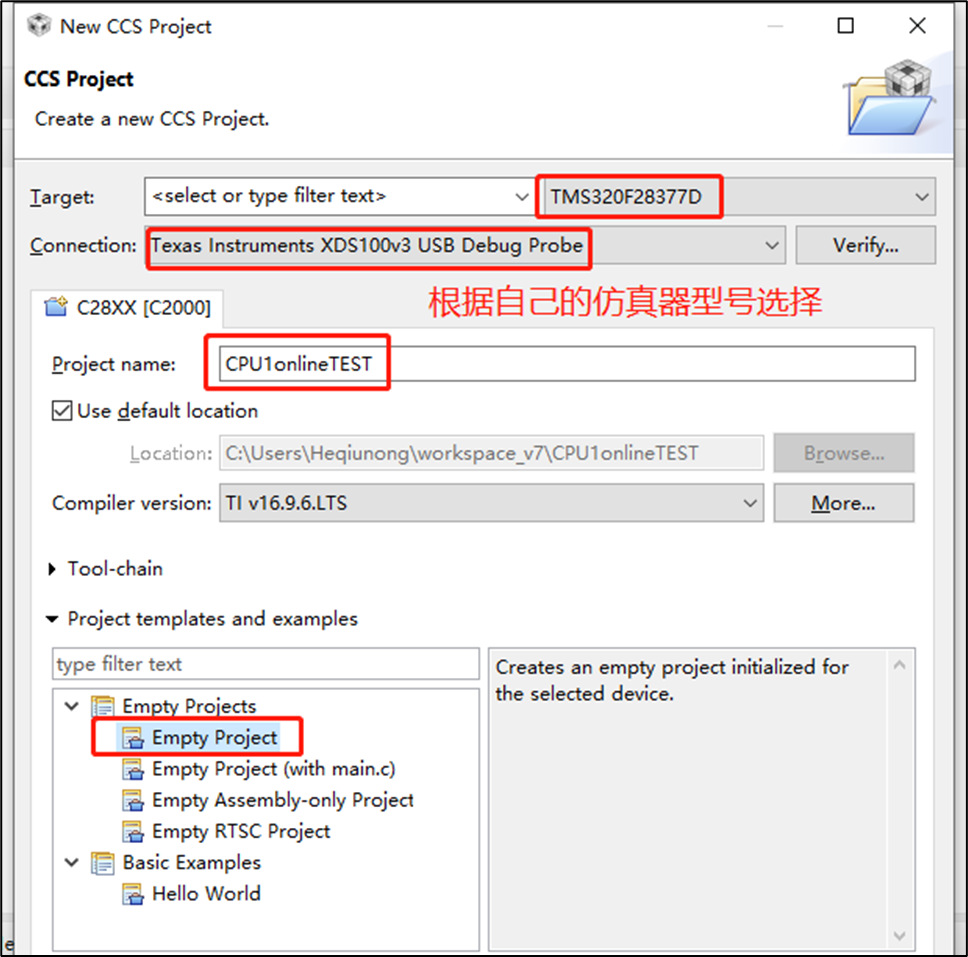
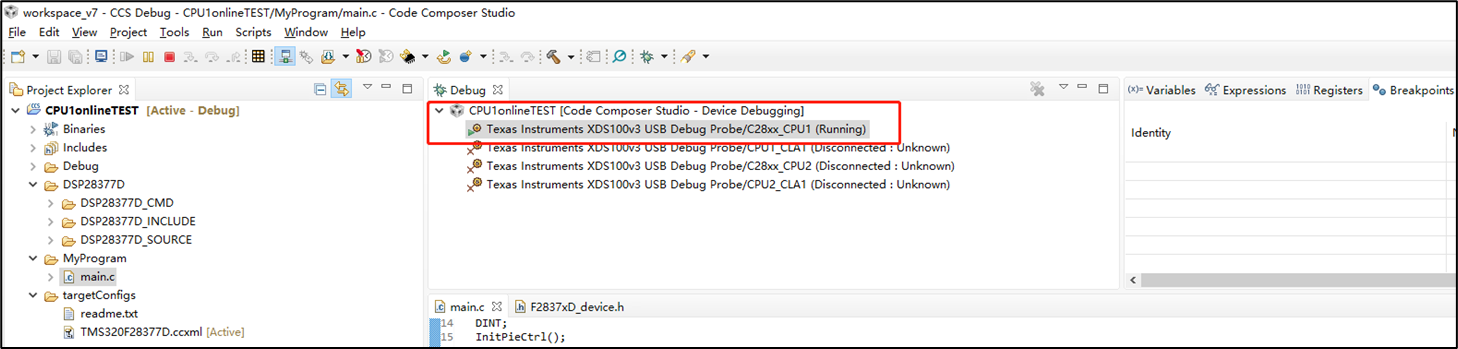
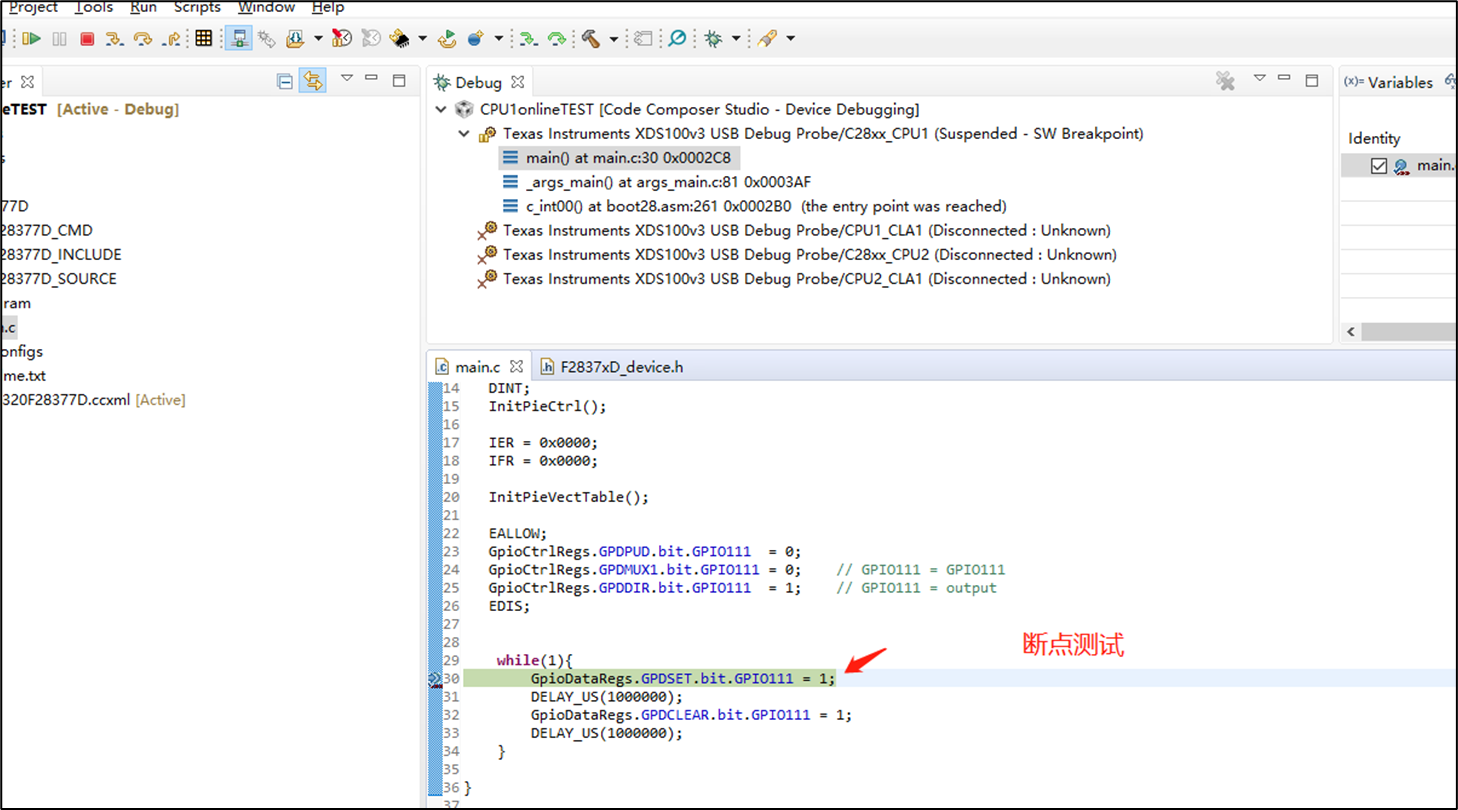
1. 仅用28377D的CPU1实现“单核”+ 在线模式(RAM)
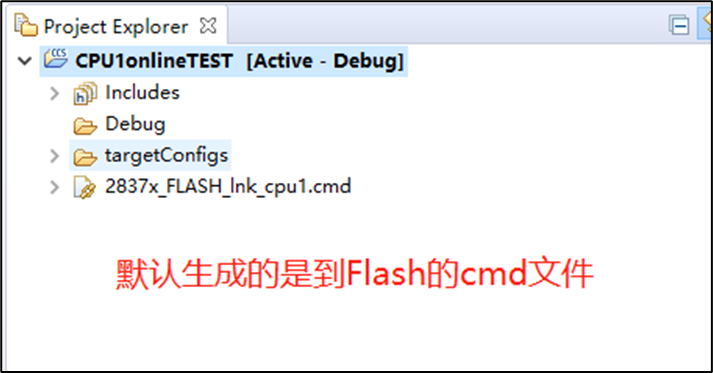
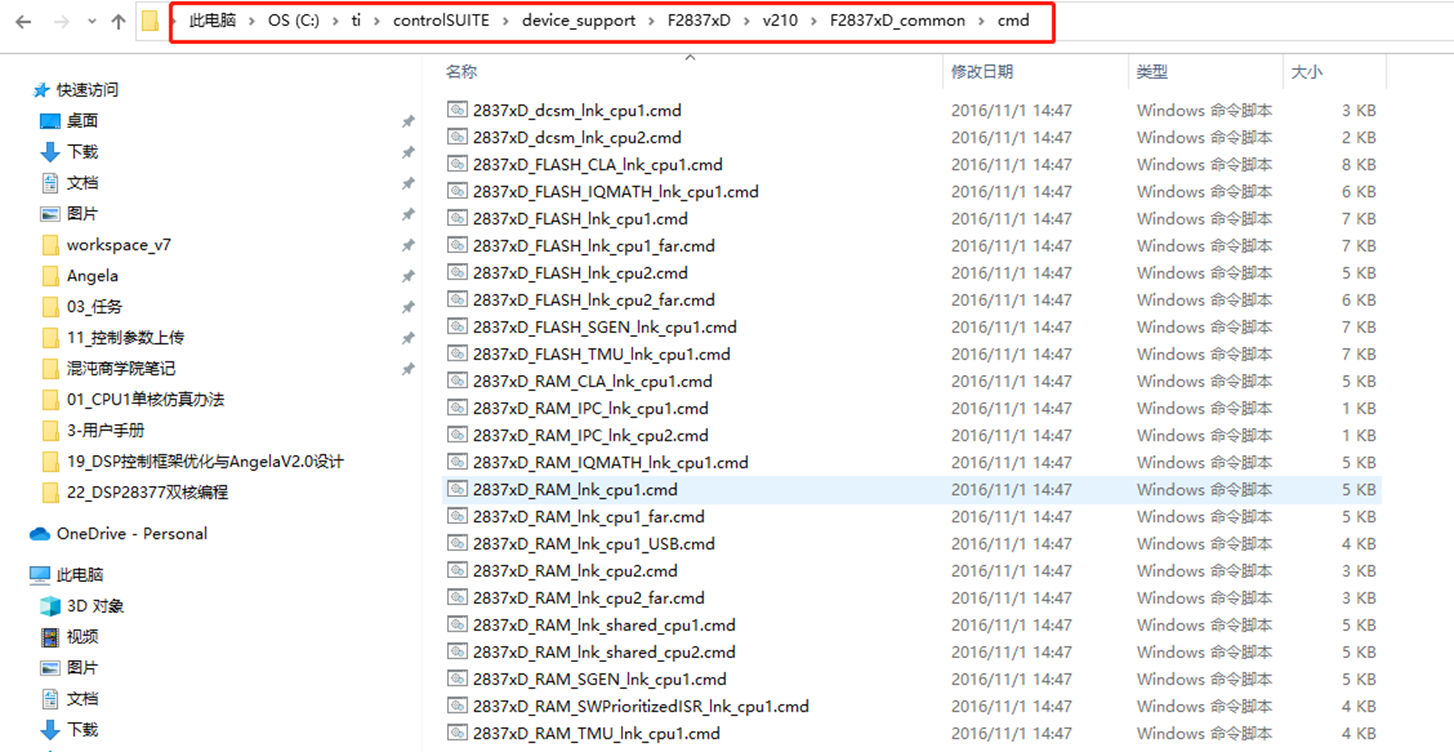
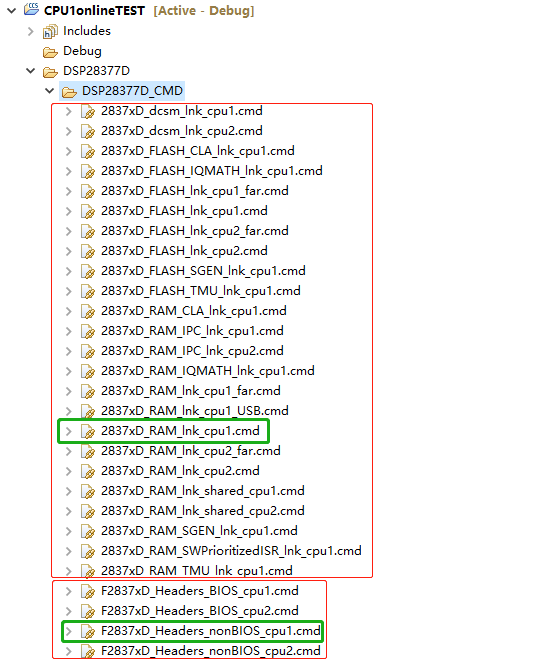
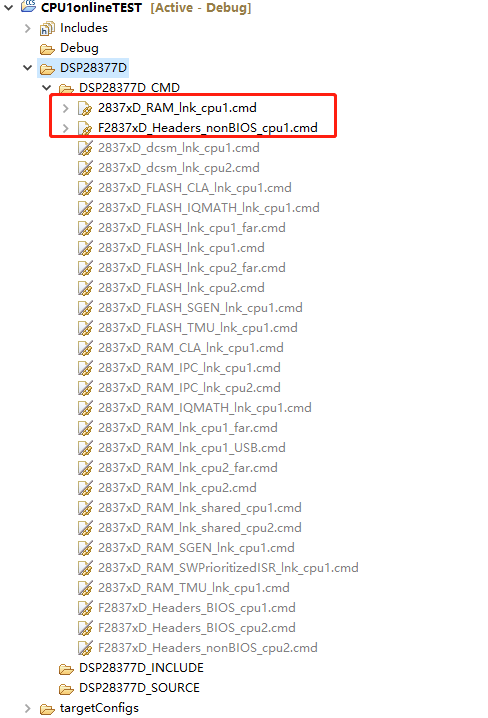
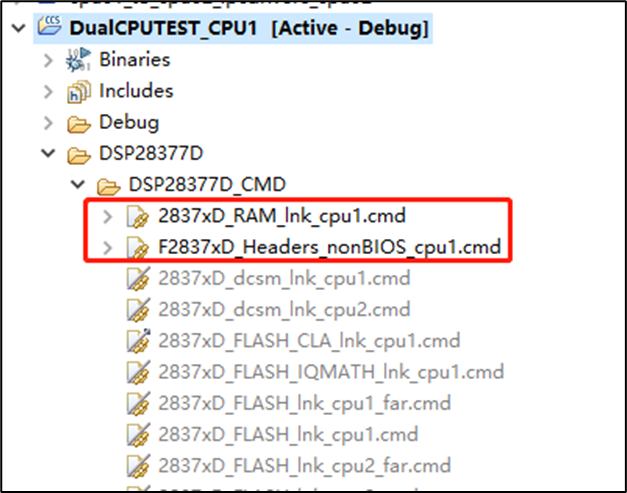
在线模式程序烧写到RAM里运行,CPU1和CPU2的启停都受到仿真器的控制,断电重启后上次运行的程序会丢失,需要重新烧写。需要注意的重点是cmd文件要选对,因为是烧写到RAM,因此选择2837xD_RAM_lnk_cpu1.cmd。另外由于我们用的是裸机程序而非RTOS,因此还需要选择F2837xD_Headers_nonBIOS_cpu1.cmd。
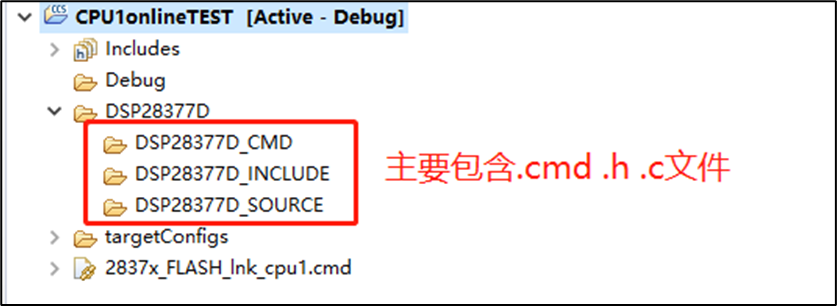
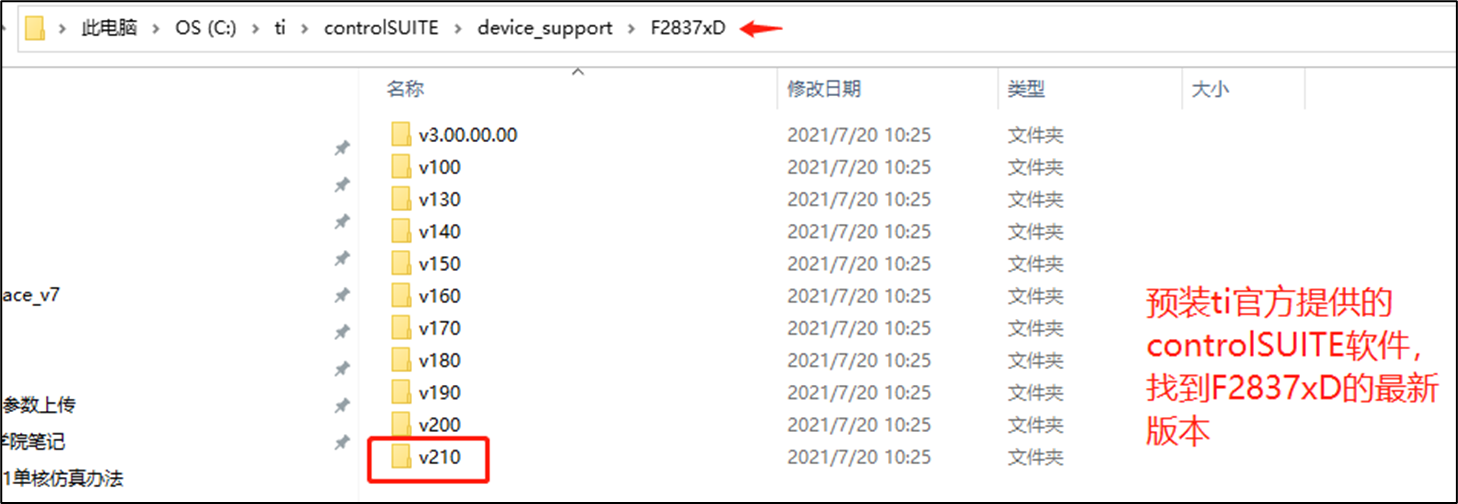
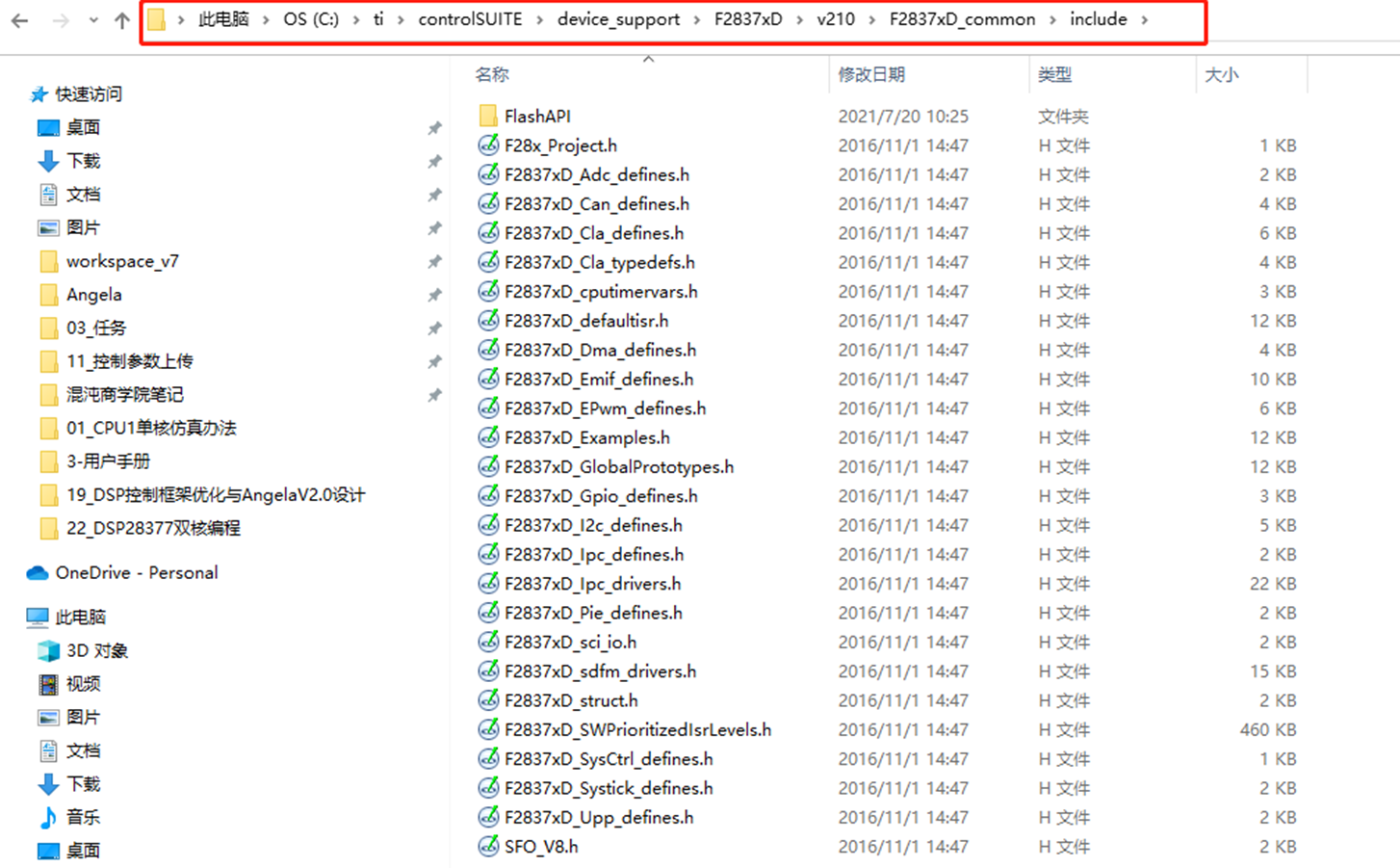
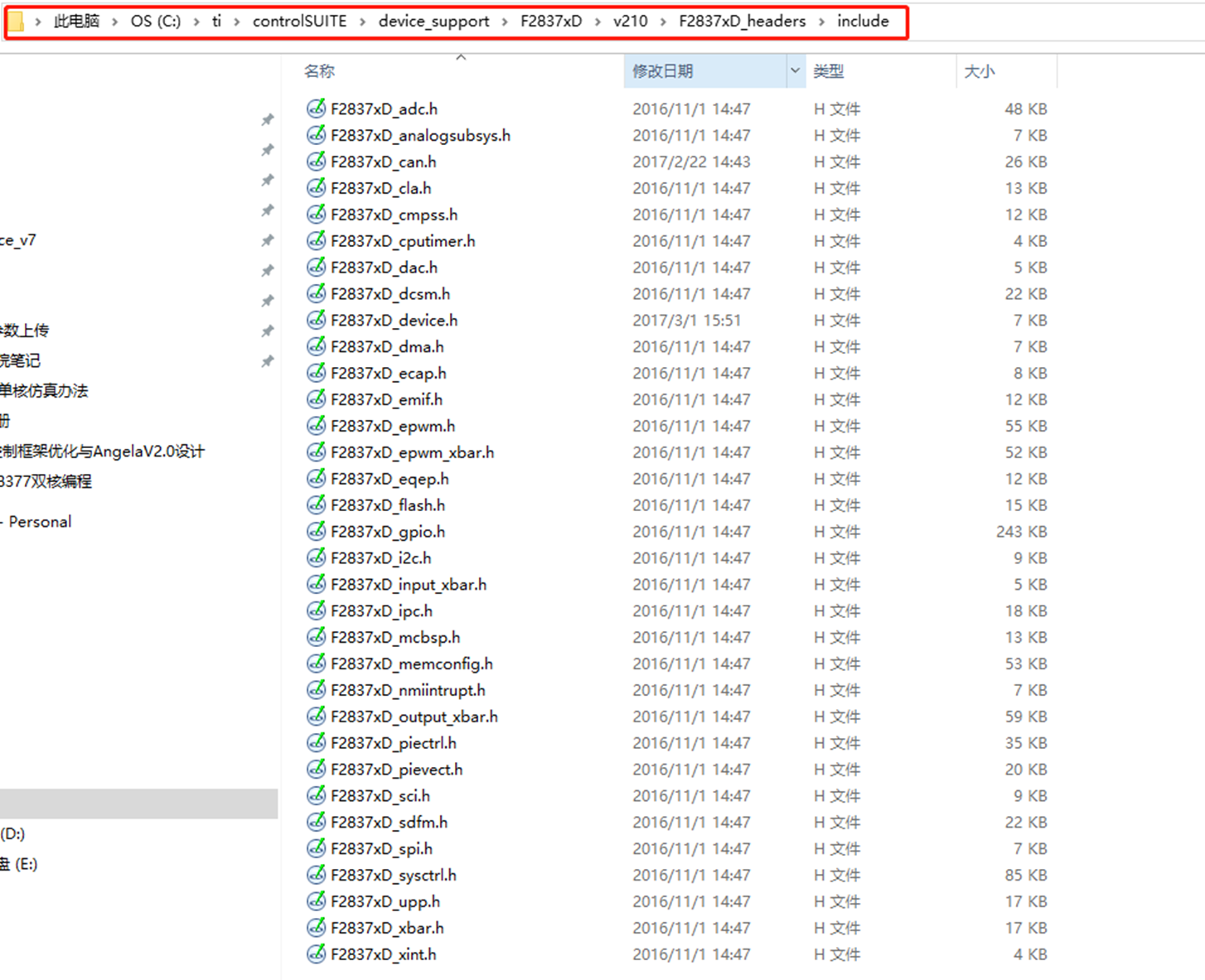
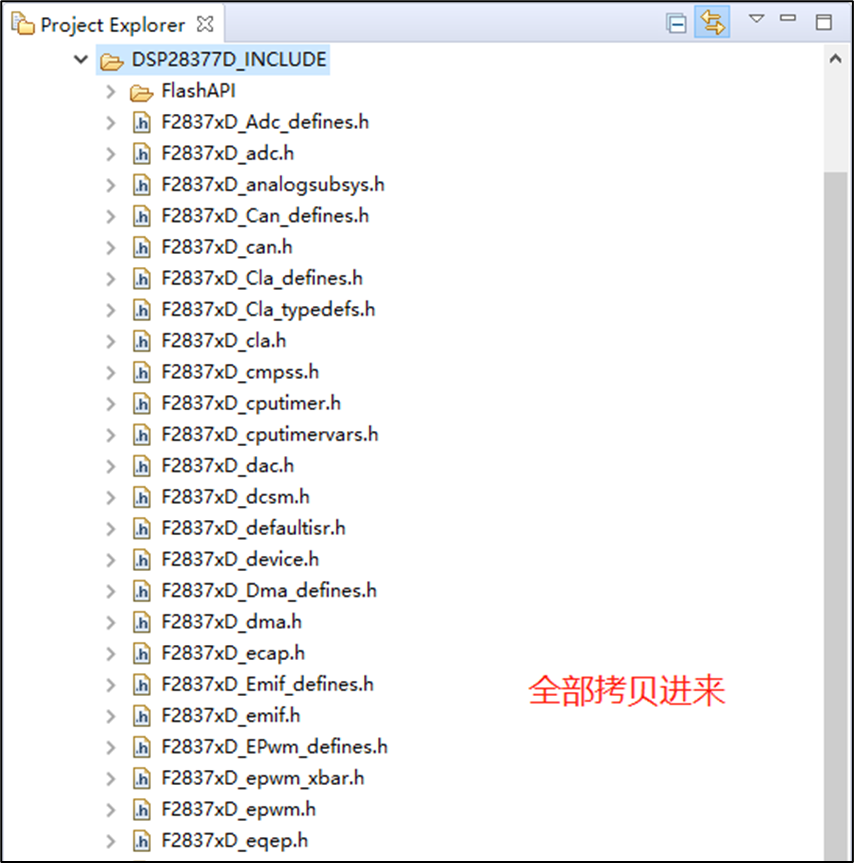
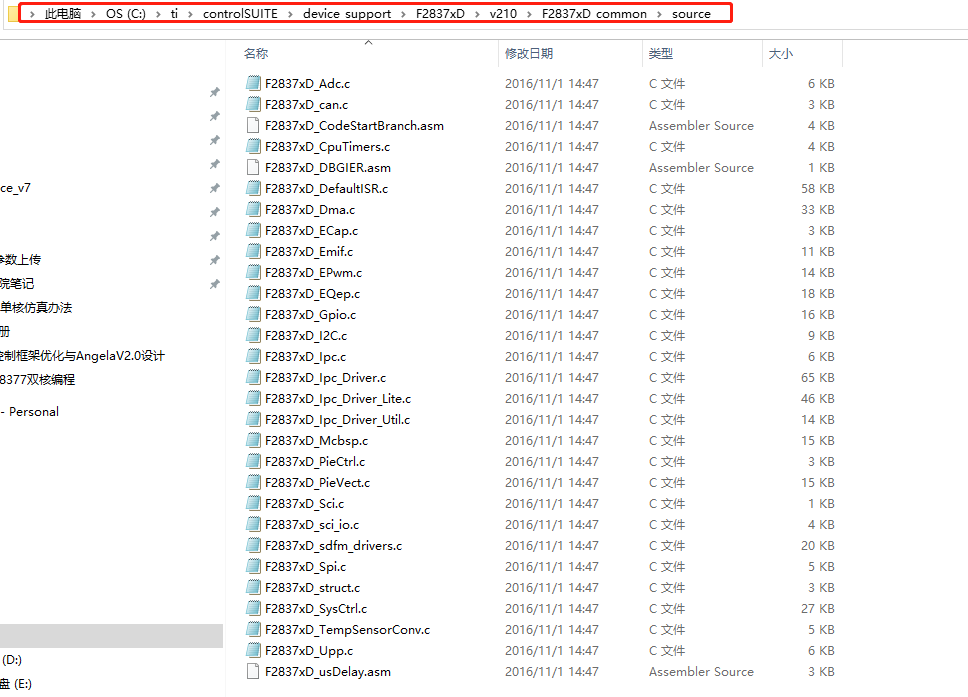
DSP_基于TMS320F28335和CCS7.2的编程入门_heqiunong的博客-CSDN博客,前面我们讲过建议去TI官网去下载controlSUITE软件,所提及的cmd文件和各种源文件 库文件这个软件都能够提供。
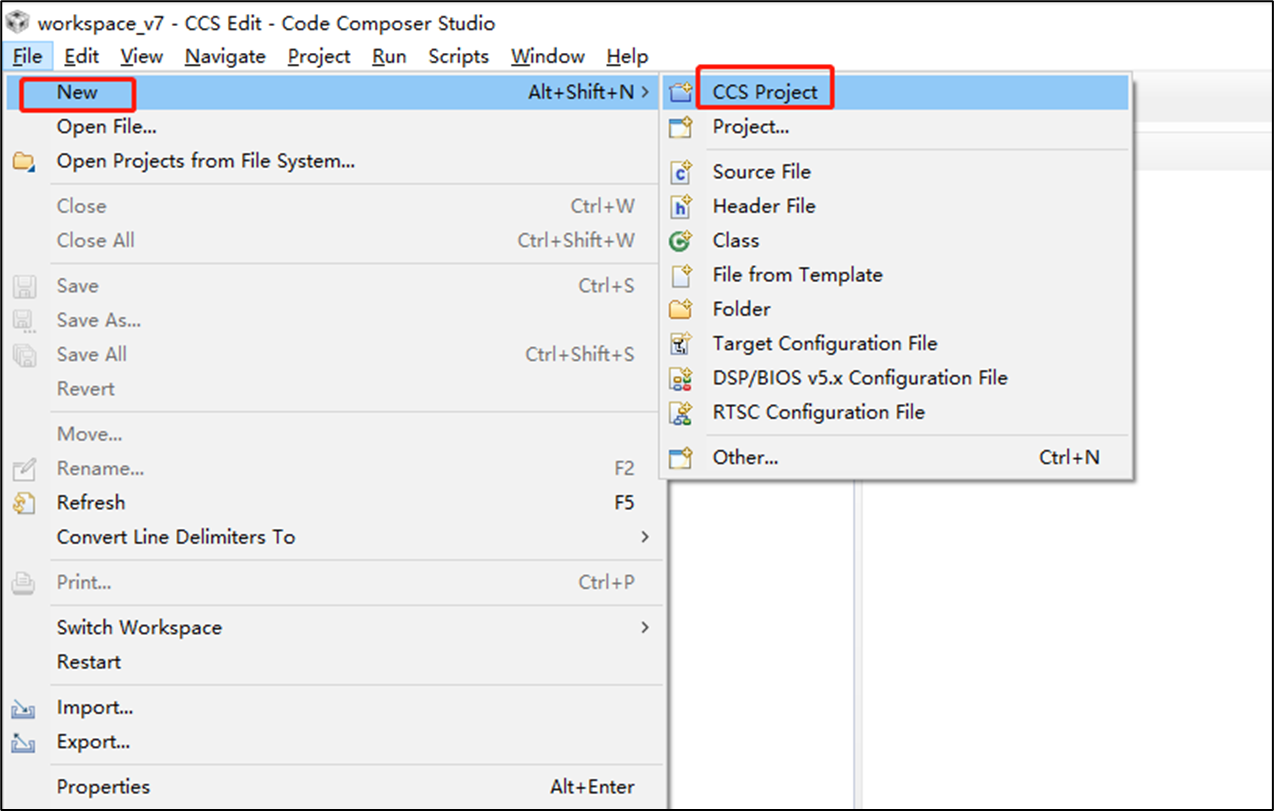
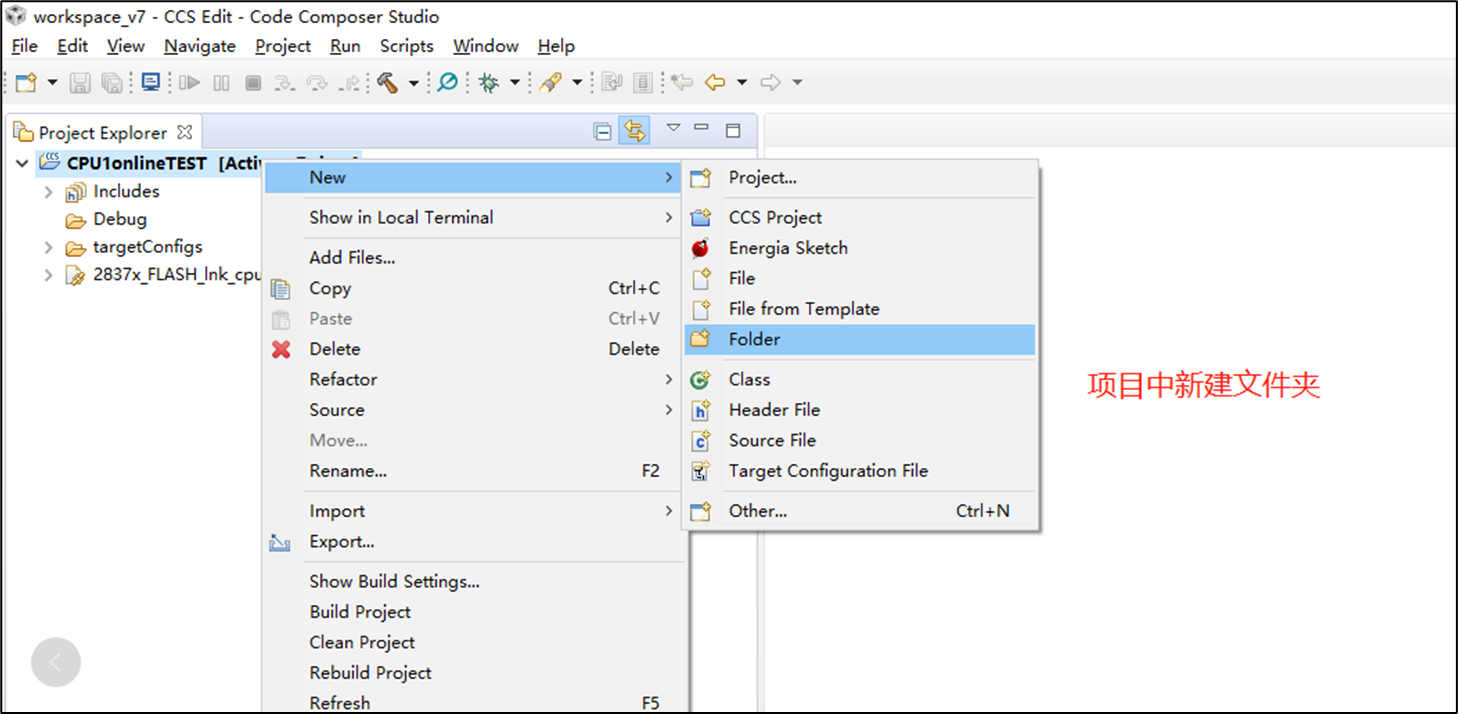
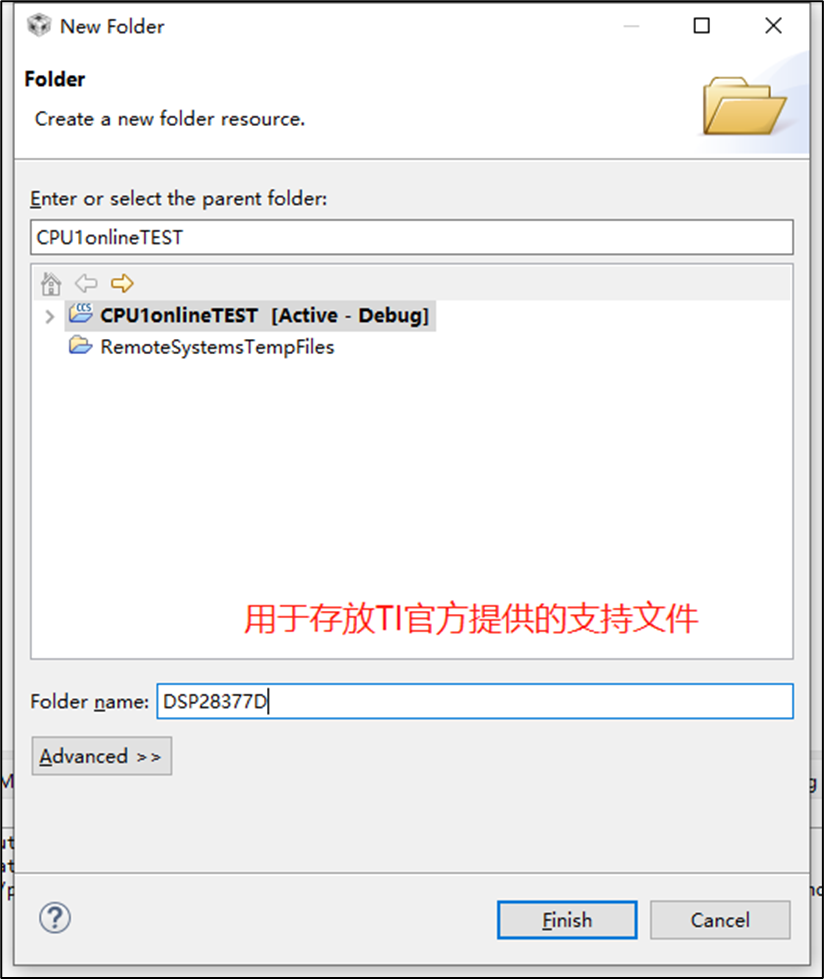
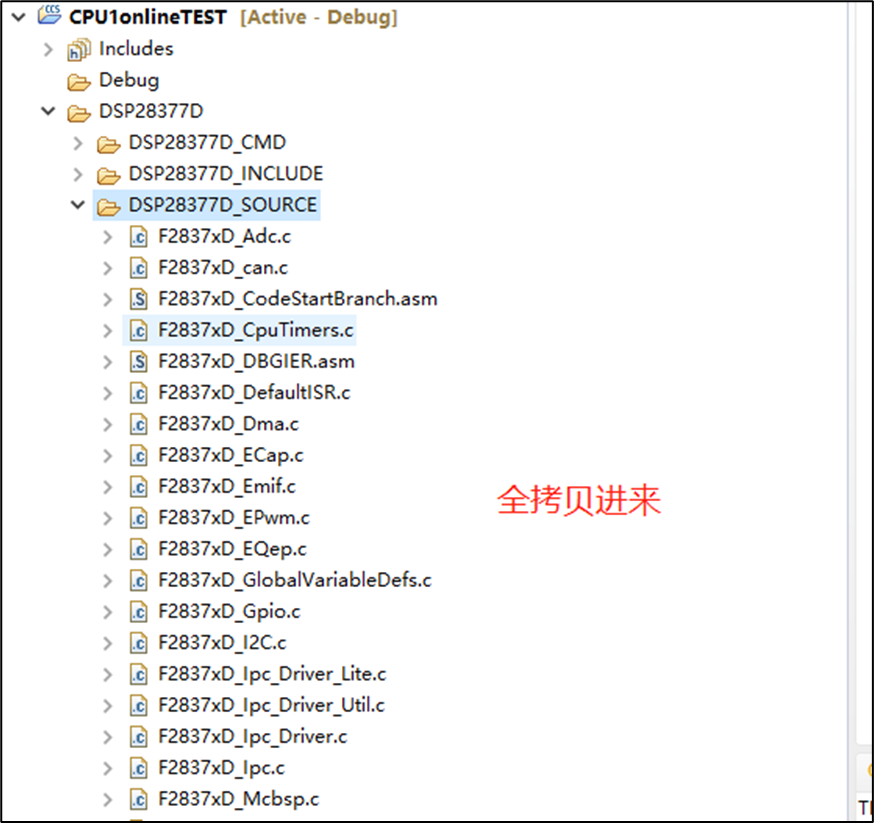
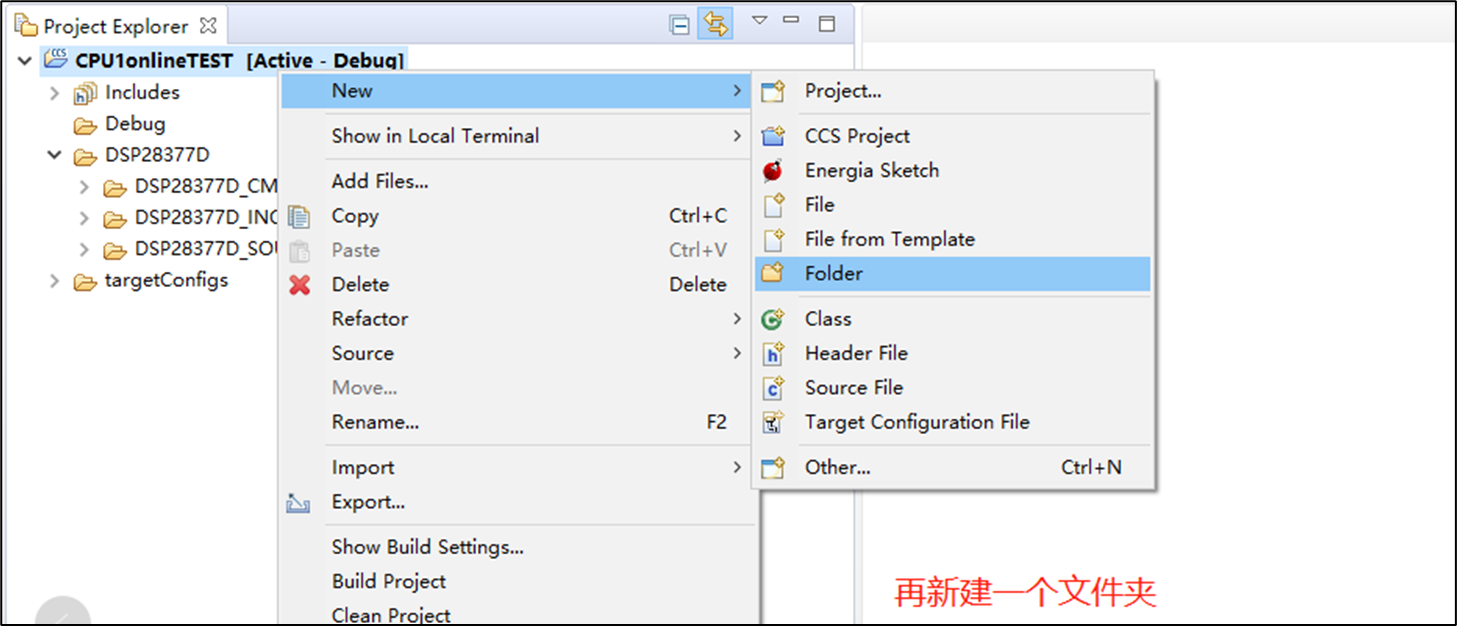
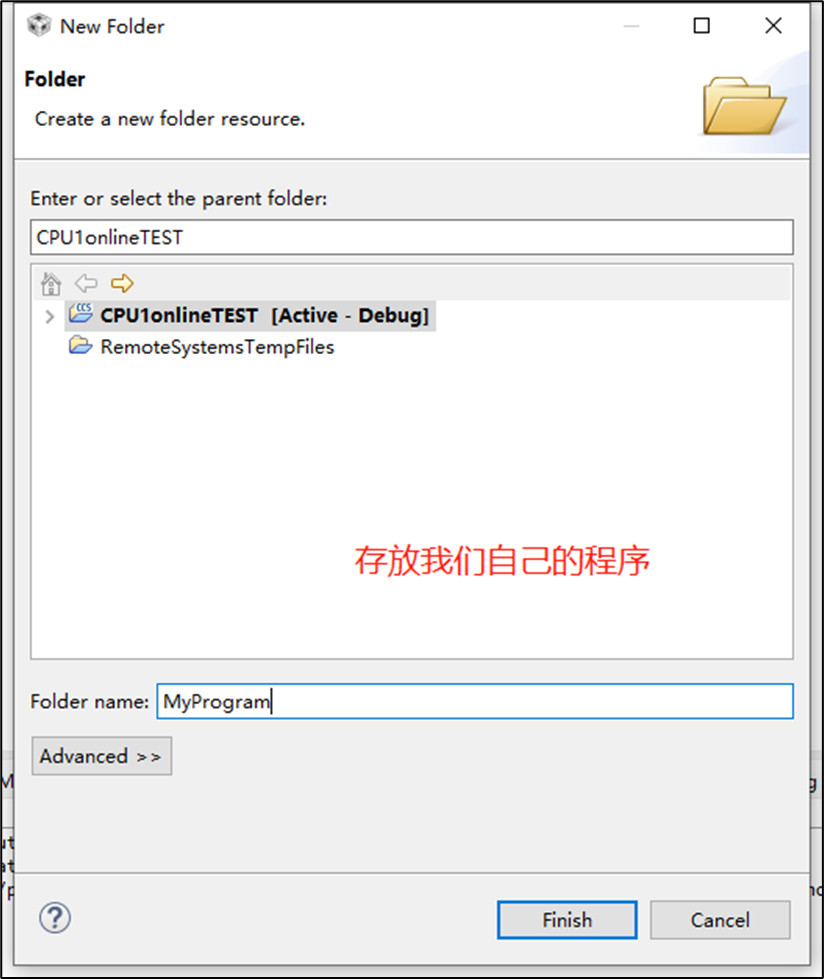
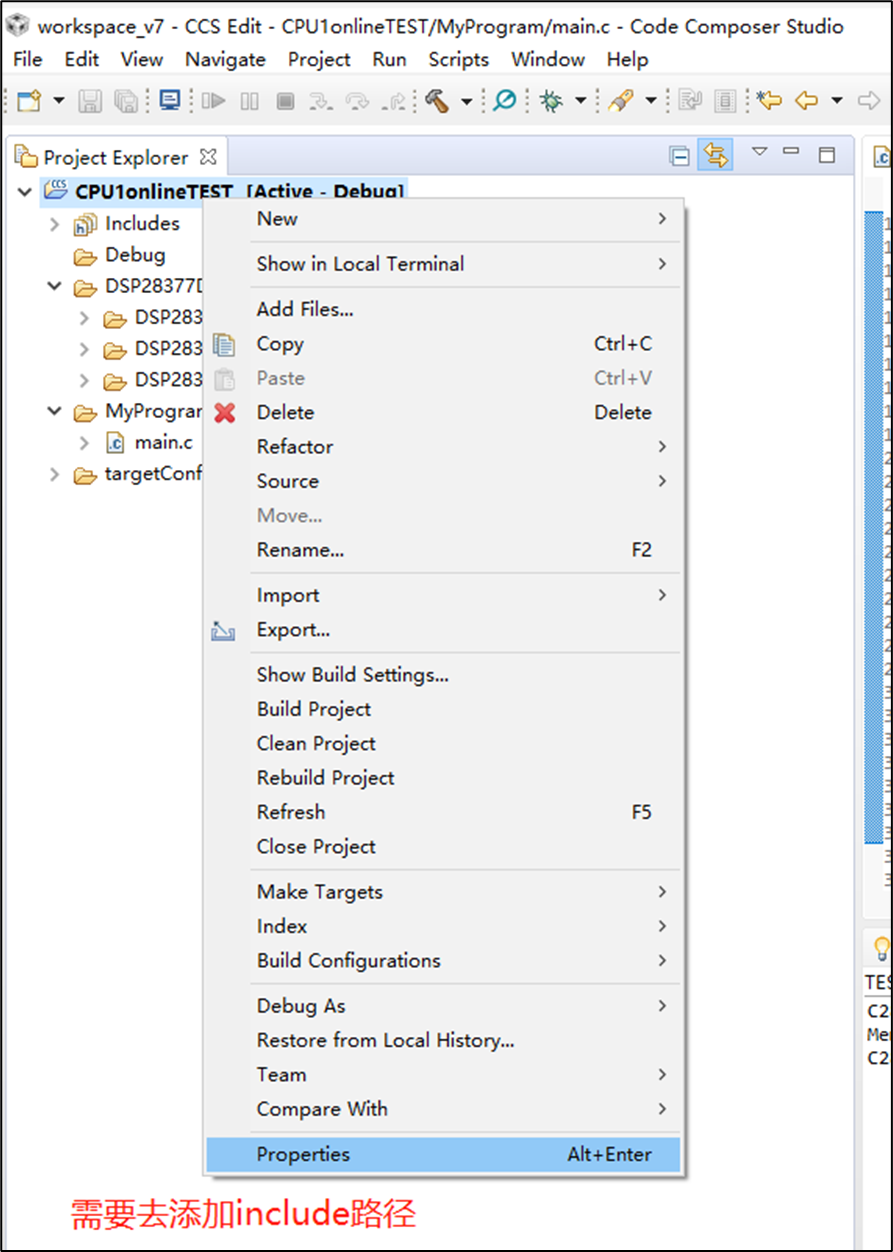
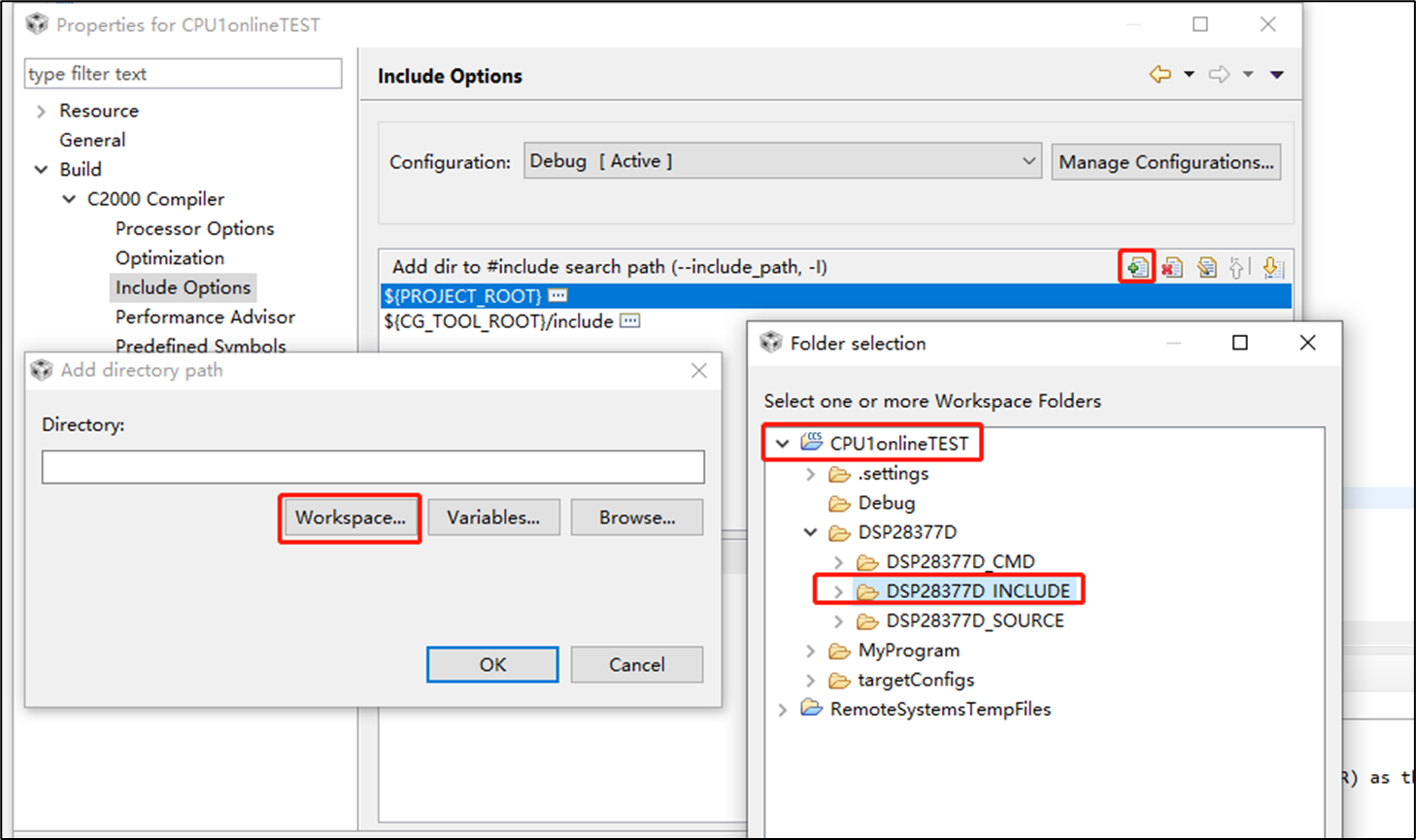
下面详细介绍从打开CCS到把CPU1运行起来。 (warning:大量无情截图,毫无感情可言)

|
|
|
|
|
|
|

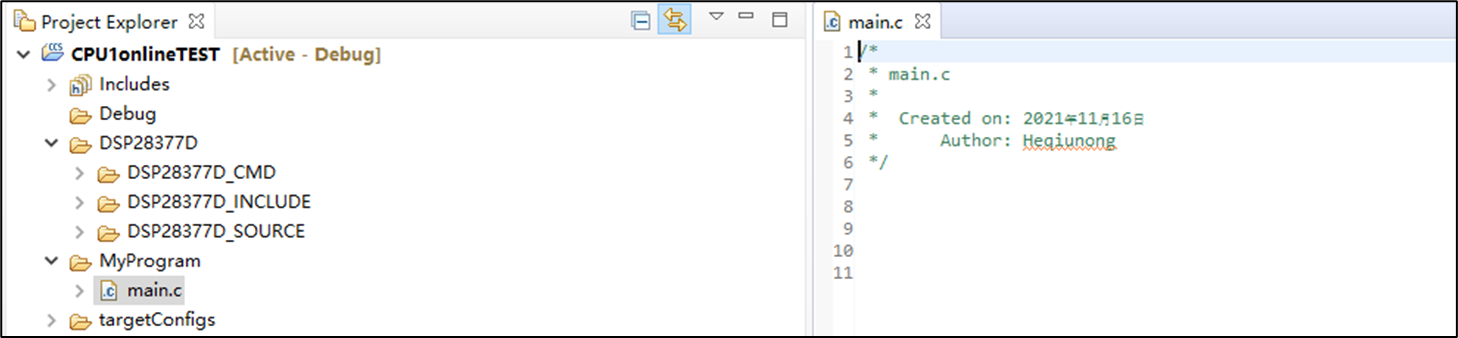
/*
* main.c
*
* Created on: 2021年11月16日
* Author: Heqiunong
*/
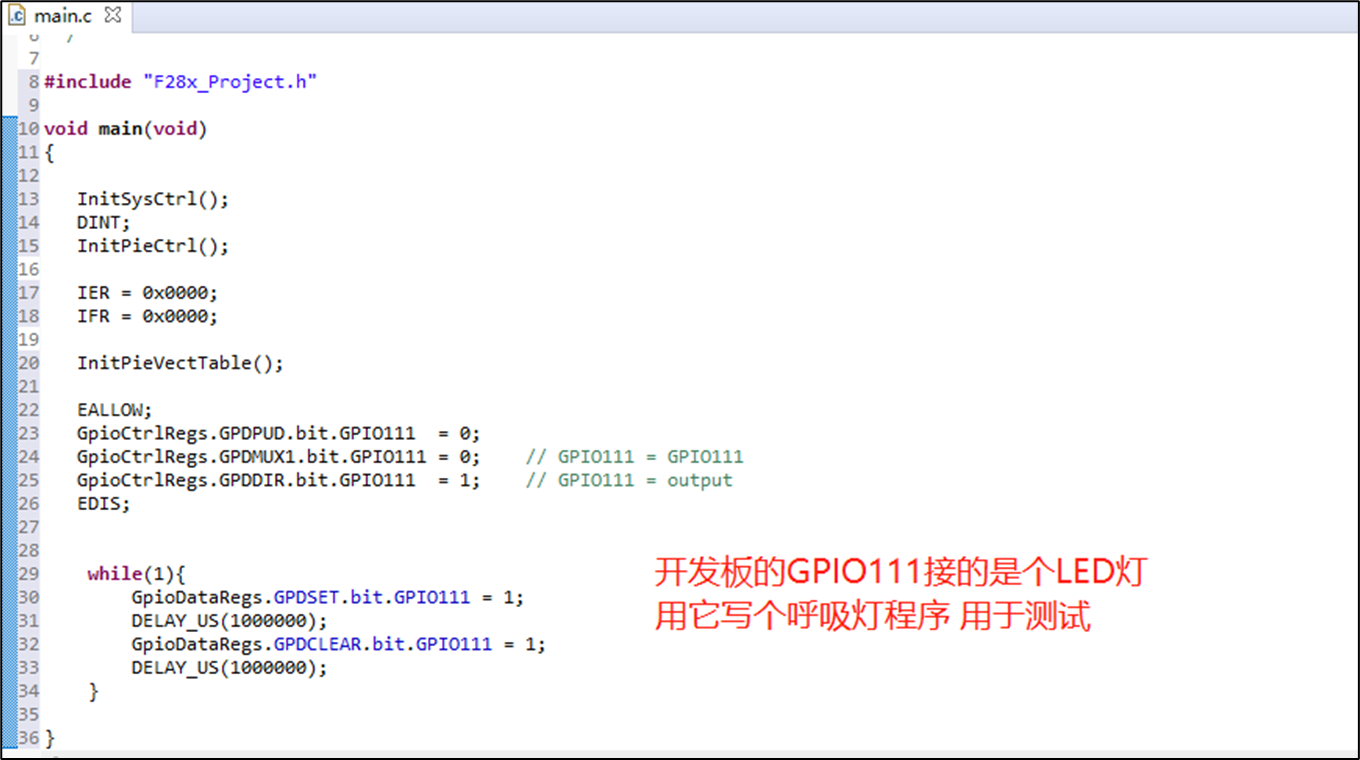
#include "F28x_Project.h"
void main(void)
{
InitSysCtrl();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
EALLOW;
GpioCtrlRegs.GPDPUD.bit.GPIO111 = 0;
GpioCtrlRegs.GPDMUX1.bit.GPIO111 = 0; // GPIO111 = GPIO111
GpioCtrlRegs.GPDDIR.bit.GPIO111 = 1; // GPIO111 = output
EDIS;
while(1){
GpioDataRegs.GPDSET.bit.GPIO111 = 1;
DELAY_US(1000000);
GpioDataRegs.GPDCLEAR.bit.GPIO111 = 1;
DELAY_US(1000000);
}
}

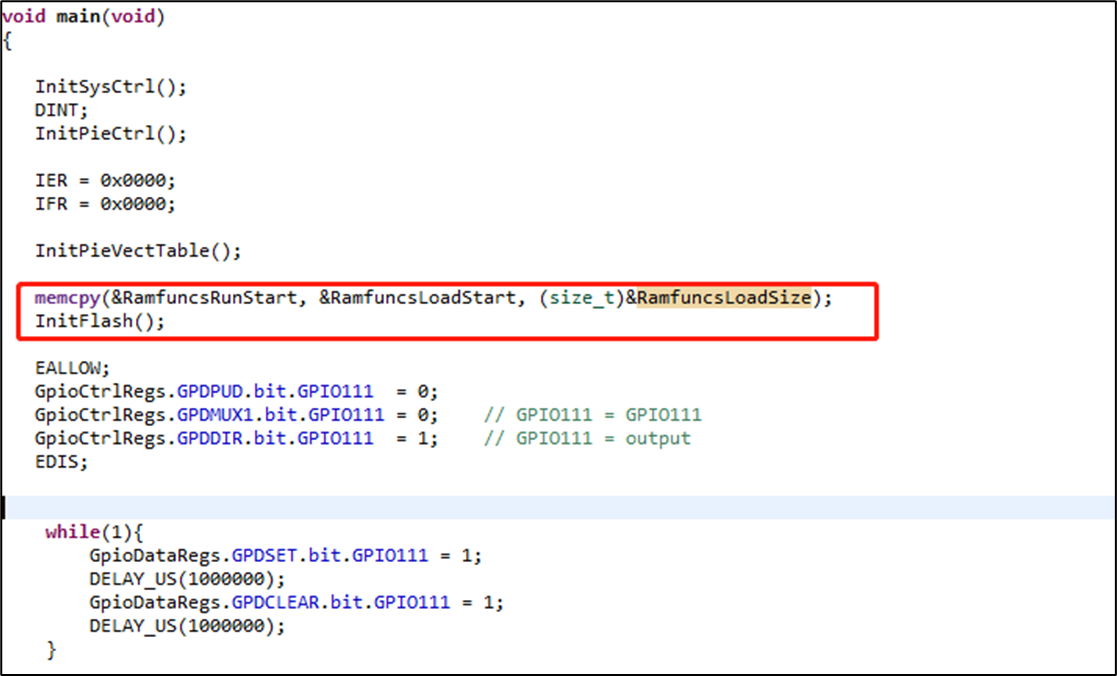
2. 仅用28377D的CPU1实现“单核”+ 离线模式(FLASH)
离线模式指用把程序烧写到Flash里运行,断电重启后,程序仍可正常运行。在线模式下,CPU1和CPU2的启动和停止都受仿真器控制。离线模式下,CPU2的启动受CPU1控制。
首先,代码需要做一个拷贝 memcpy。【注意:以下操作有效的前提是代码框架是按第一步那样搭建的】
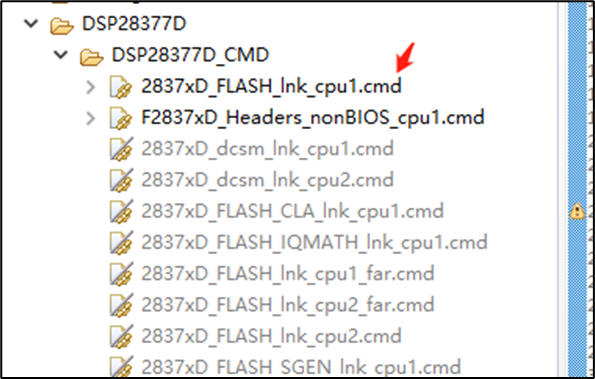
其次,cmd文件需要换一个
编译上传后,断电,把仿真器拔掉,再上电。 程序依然正常运行,可以改变呼吸灯的频率简单验证程序是否离线运行正常。
3. CPU1 + CPU2 实现“双核”+ 在线模式(RAM)
为了验证双核的程序,基于双核实现不同频率的呼吸灯。TMS320F28377D的双核CPU1和CPU2,是近乎可视为各自独立的,从某种程度上,你可以把它视为两块单核的dsp来用。如果想要跑双核的程序,需要给CPU1和CPU2分别建一个工程。
3.1 CPU1和CPU2分别各建一个工程
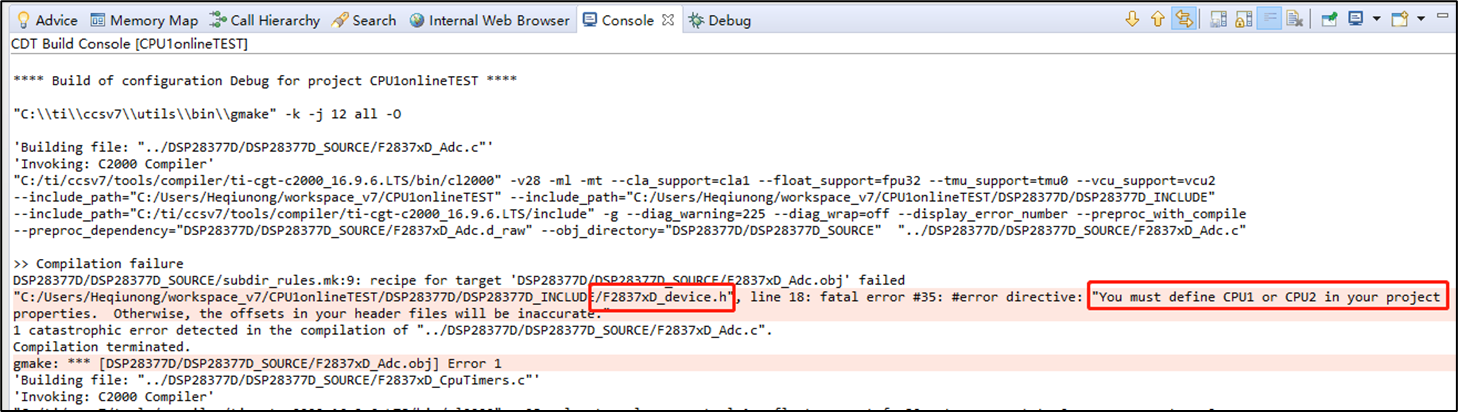
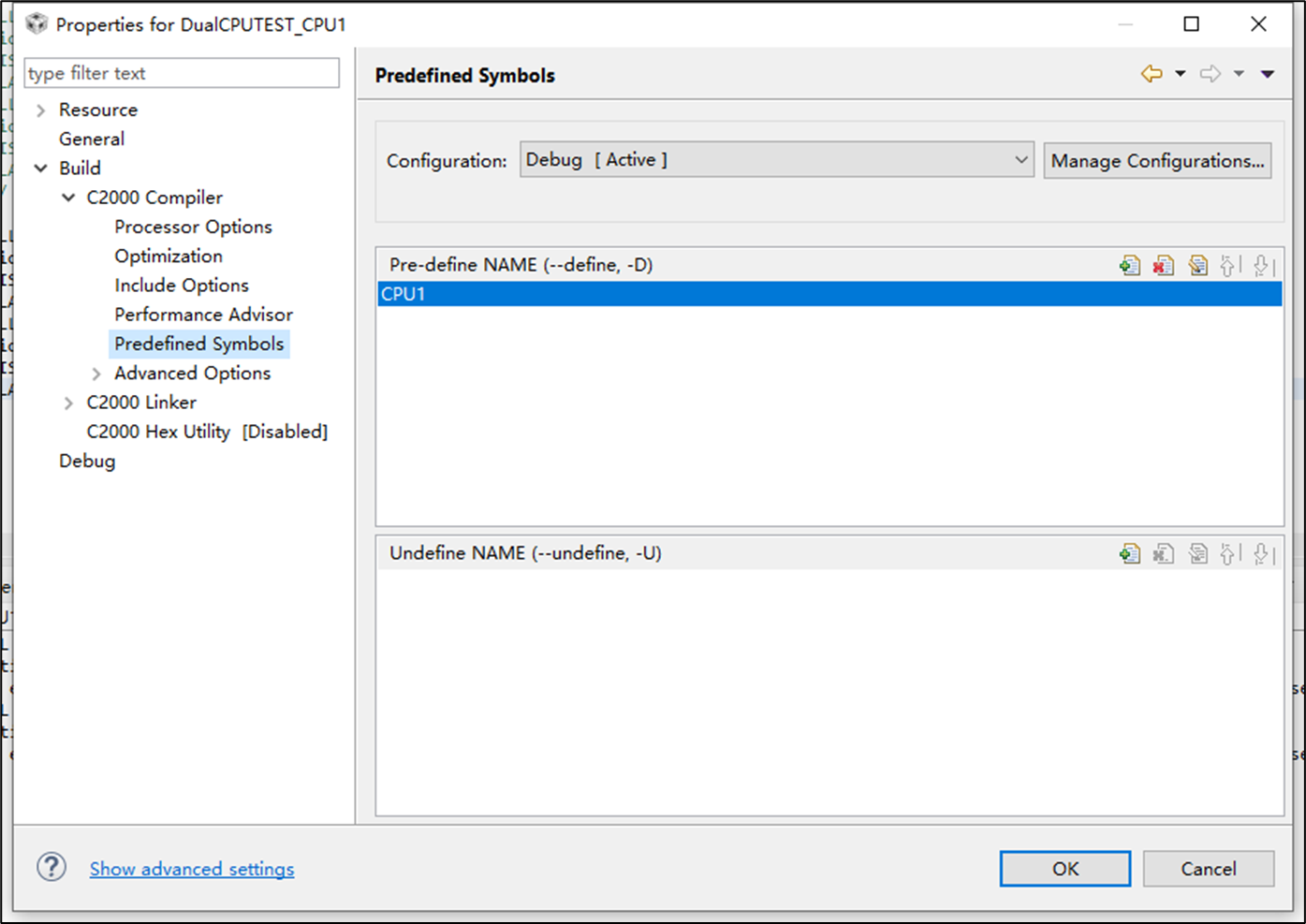
首先需要说明的是CPU1和CPU2都需要设置一个 Predefined Symbols, CPU1就设置个CPU1,CPU2就设置个CPU2。 前文我们是在源文件里面#define CPU1。现在是我们换了一种更official的方法。
3.2 CPU1CPU2虽近乎独立,但它们应是主从关系
3.2.1 比如CPU2是无法配置GPIO的,它只能CPU1来配置
下面是CPU2的代码,里面尝试配置GPIO的上拉,复用和输出方向
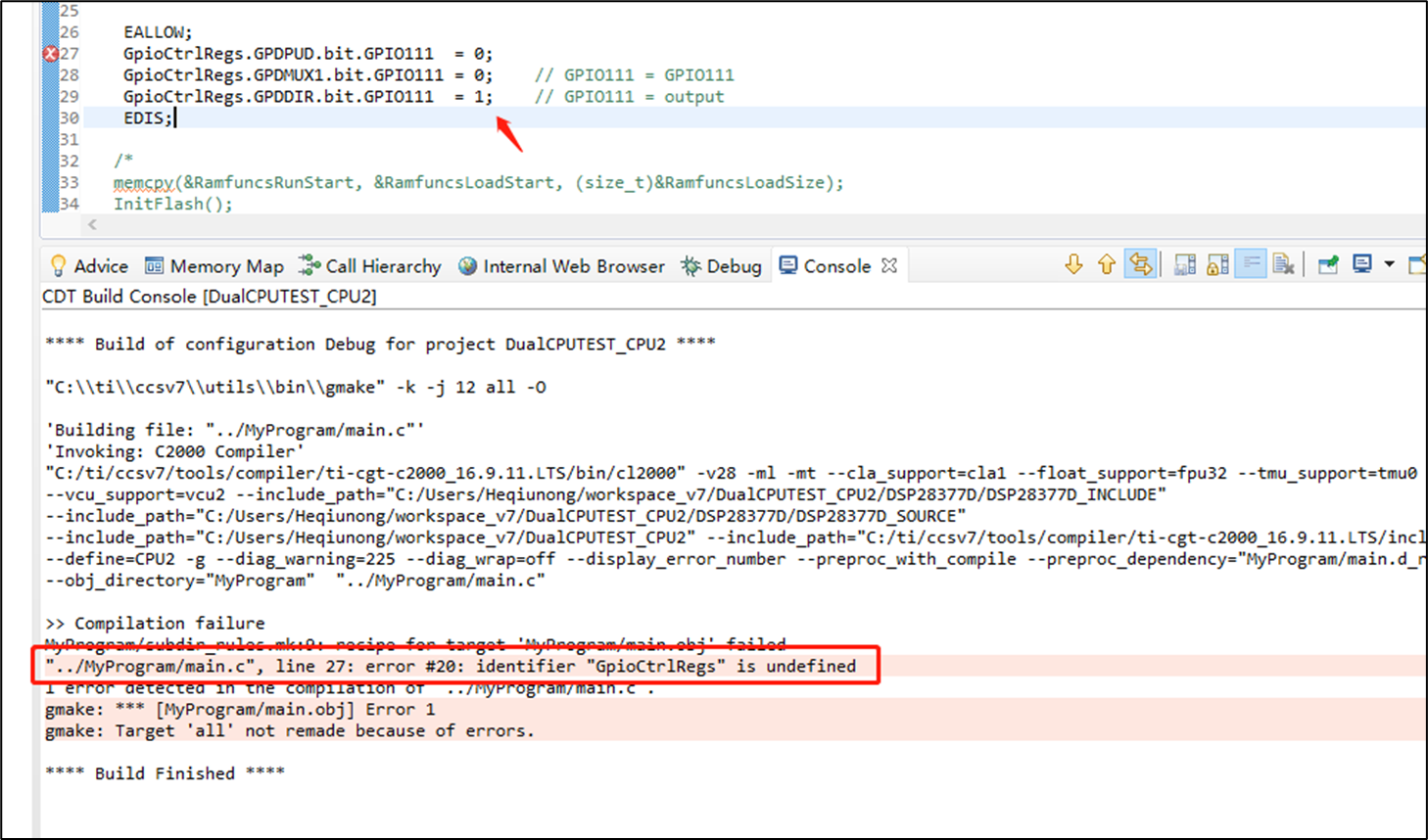
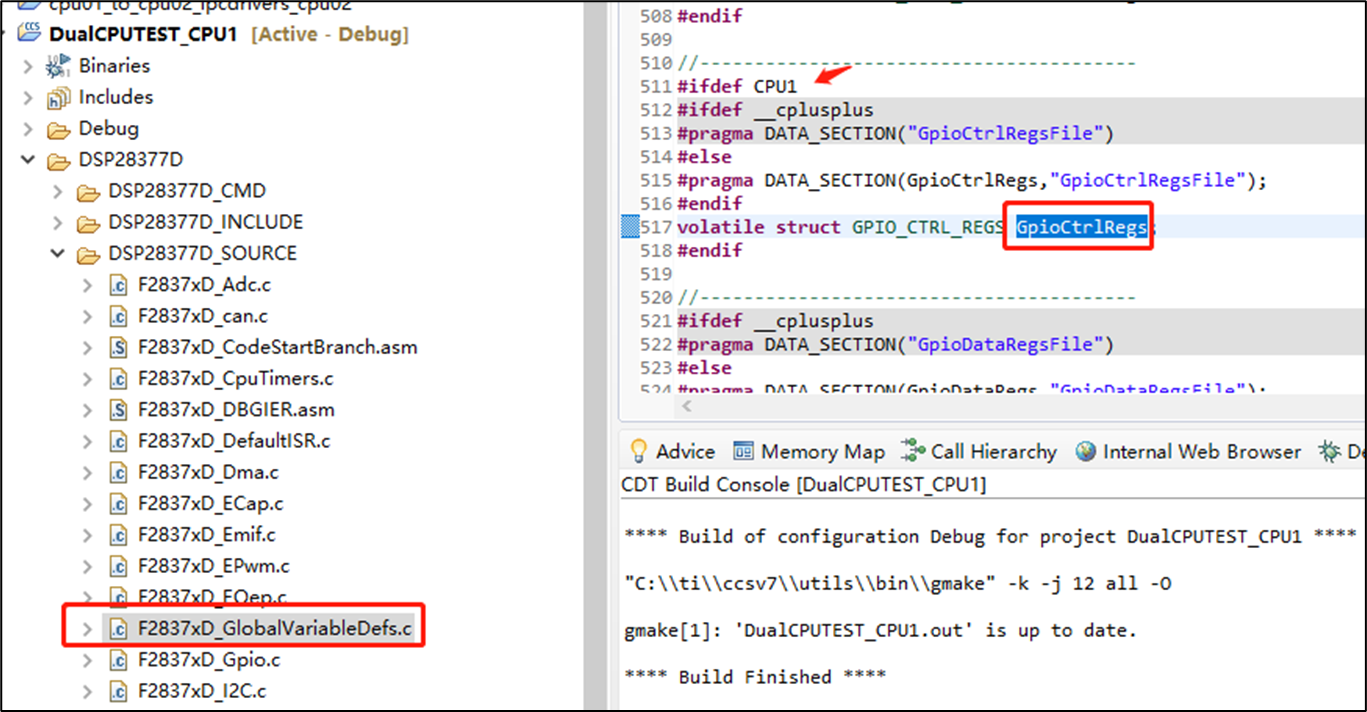
因此GPIO的配置,则必须放在CPU1的工程里面。 我们的程序配置只需要配置两个连LED灯的GPIO MUX功能为GPIO,方向配置成输出。
3.2.2 另外还有一个证据说明CPU1 CPU2是主从关系
CPU1能够使用官方提供的所有source文件,而CPU2却有部分source文件是不支持的。如下图所示。
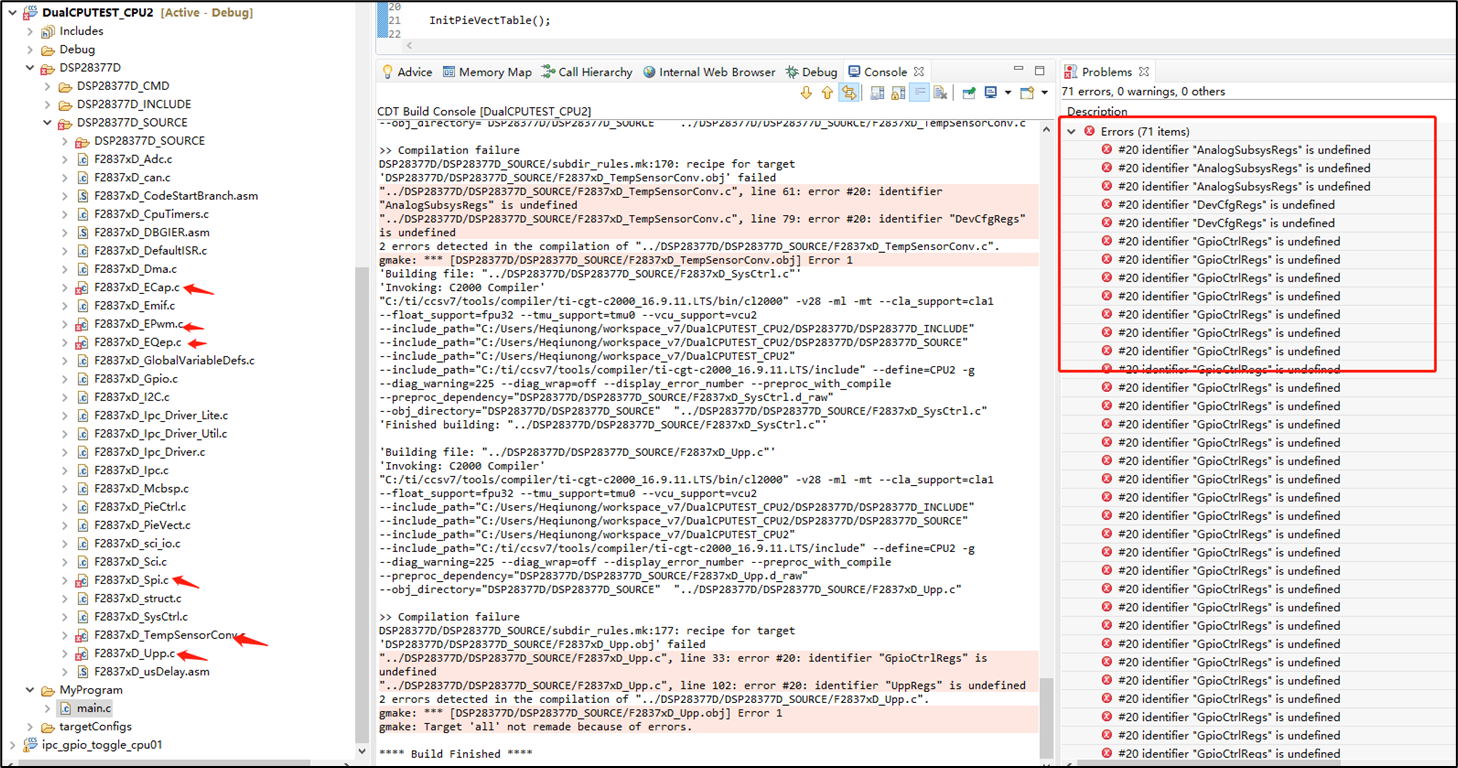
把图中出现问题,带有小红×的.c源文件删除,CPU2的工程即可正常编译。
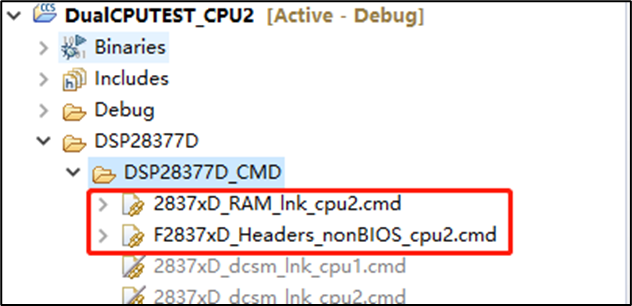
3.3CMD文件的选择
| CPU1工程
| CPU2工程
|
3.4 仿真时,工程启动顺序(很关键)
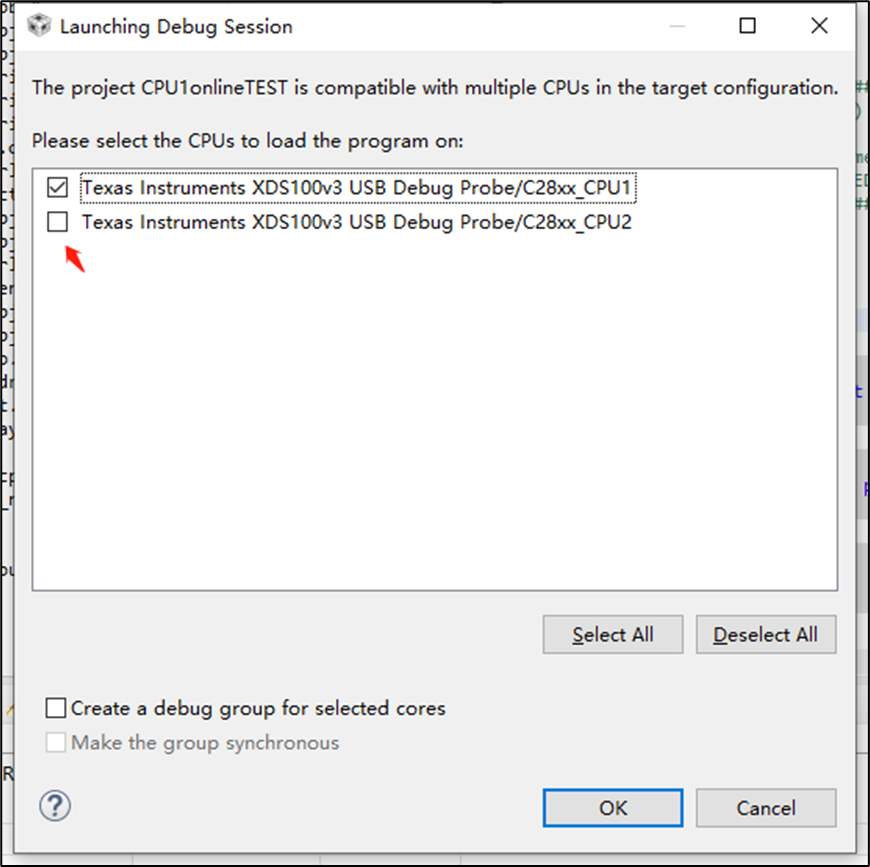
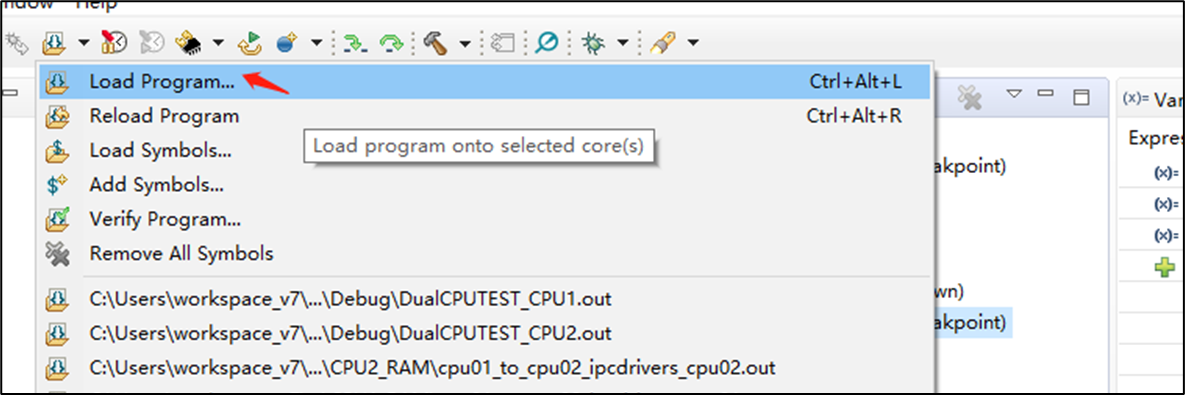
首先用CPU1的工程来连接,并且把CPU1和CPU2两个都勾选上。 这特别关键,必须选对,它只给你选一次的机会,后面就不让你选了。我真的找了好久的接口,会的朋友可以教教我
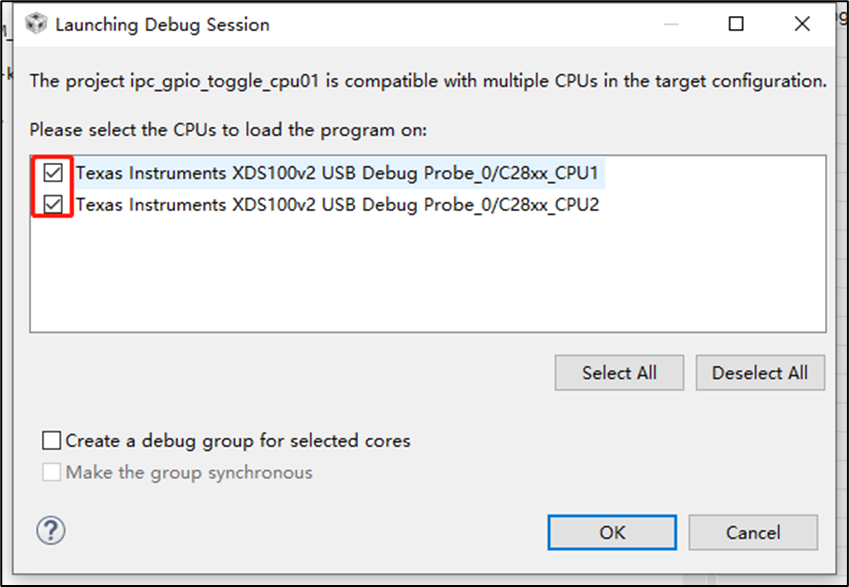
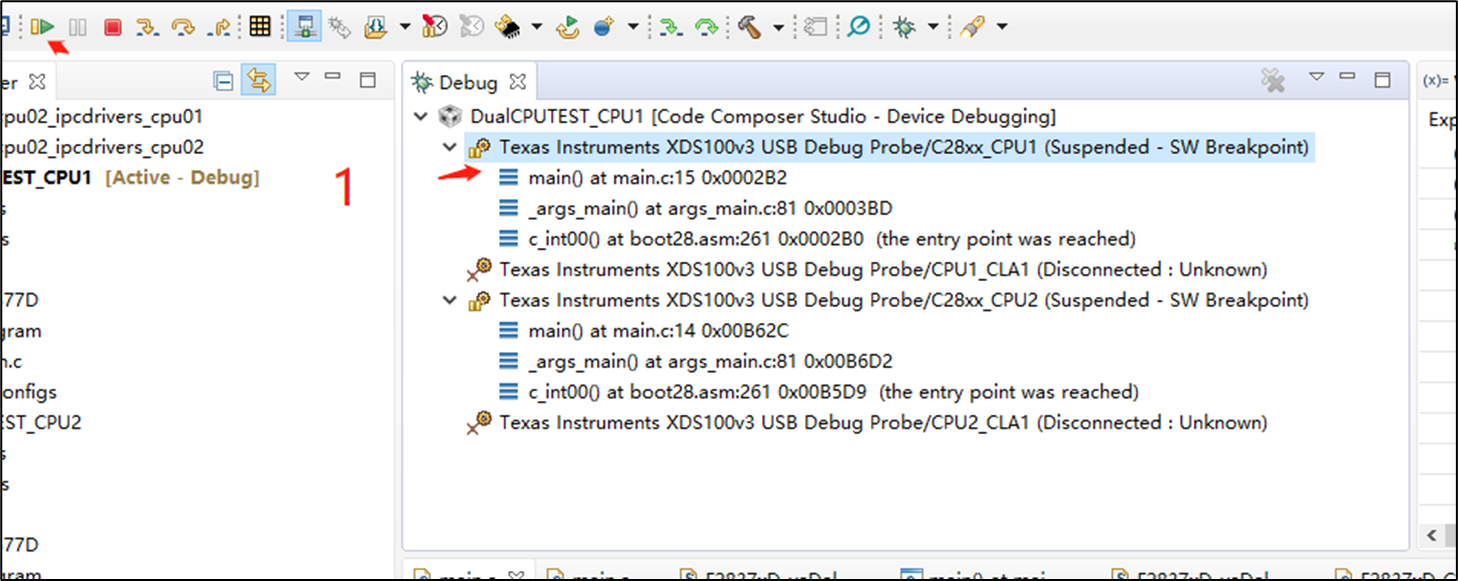
然后,就会出现下图的情况
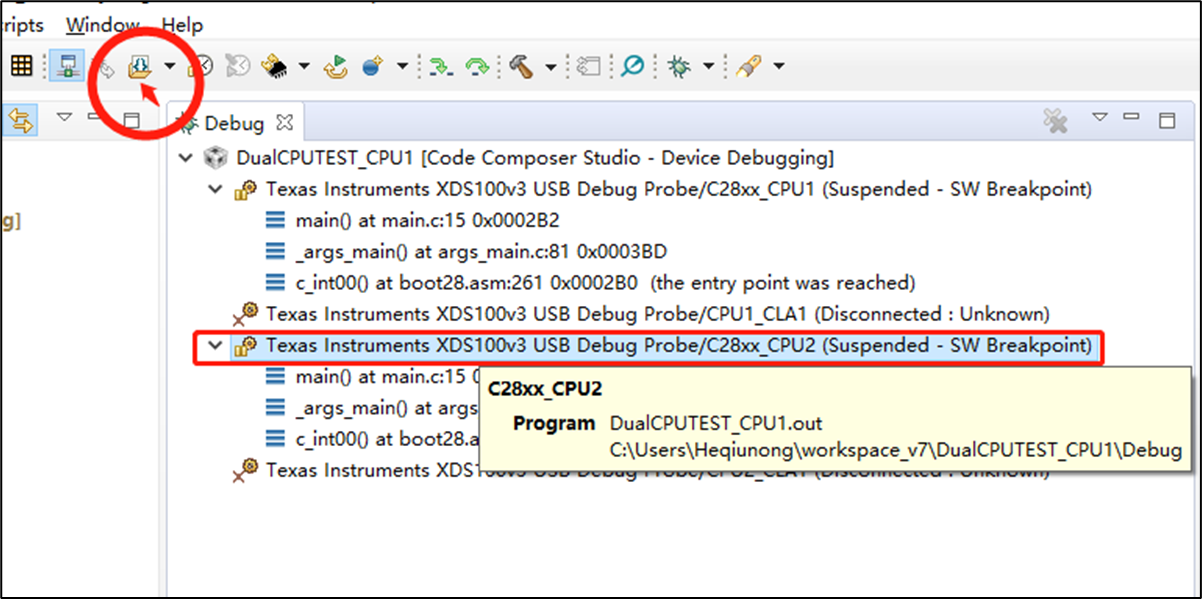
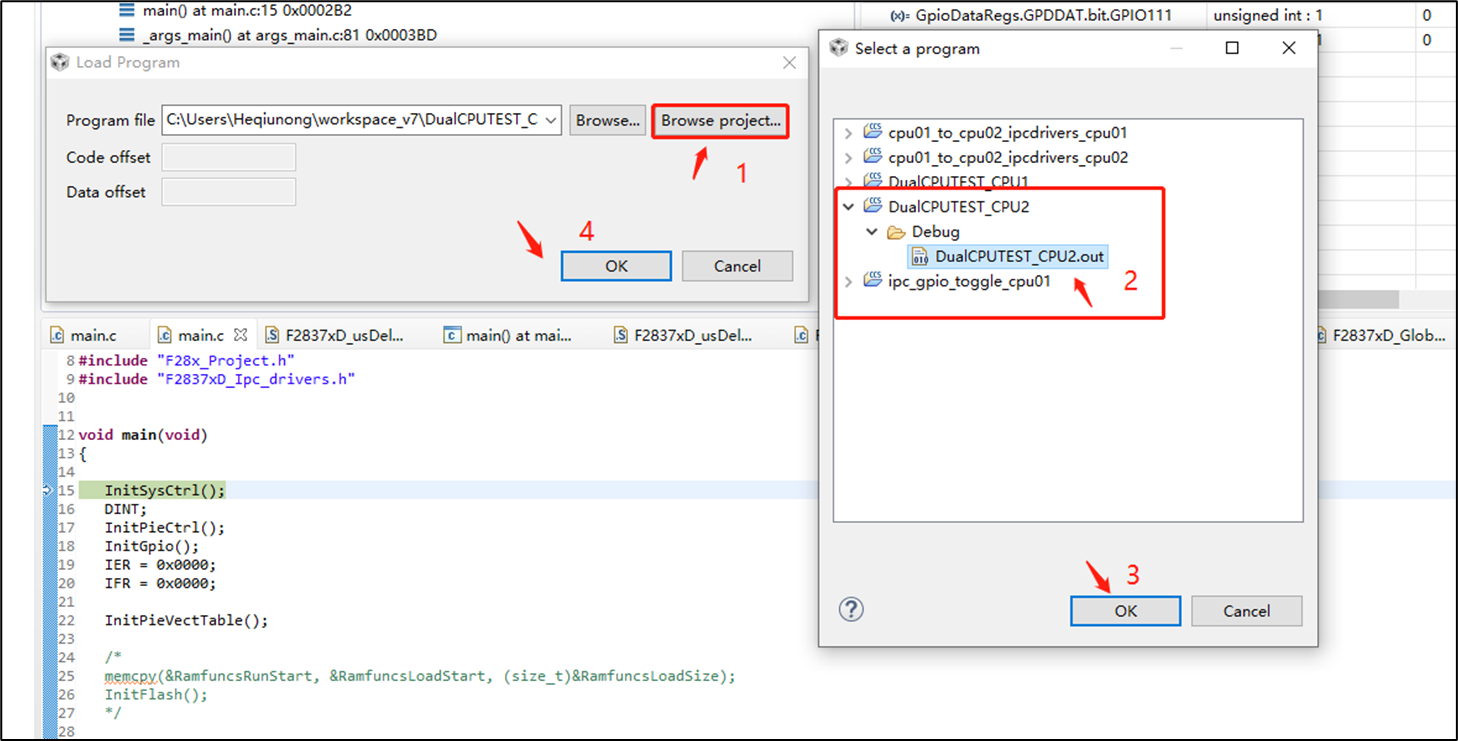
我们发现, 此时CPU2上目前加载的是CPU1工程的代码,因此我们需要替换成CPU2本身的代码,所以需要重新load。
好,现在CPU1是跑的是CPU1工程的程序,CPU2跑的CPU2程序。 现在还需要注意的是 先跑CPU1的程序,再跑CPU2的程序。
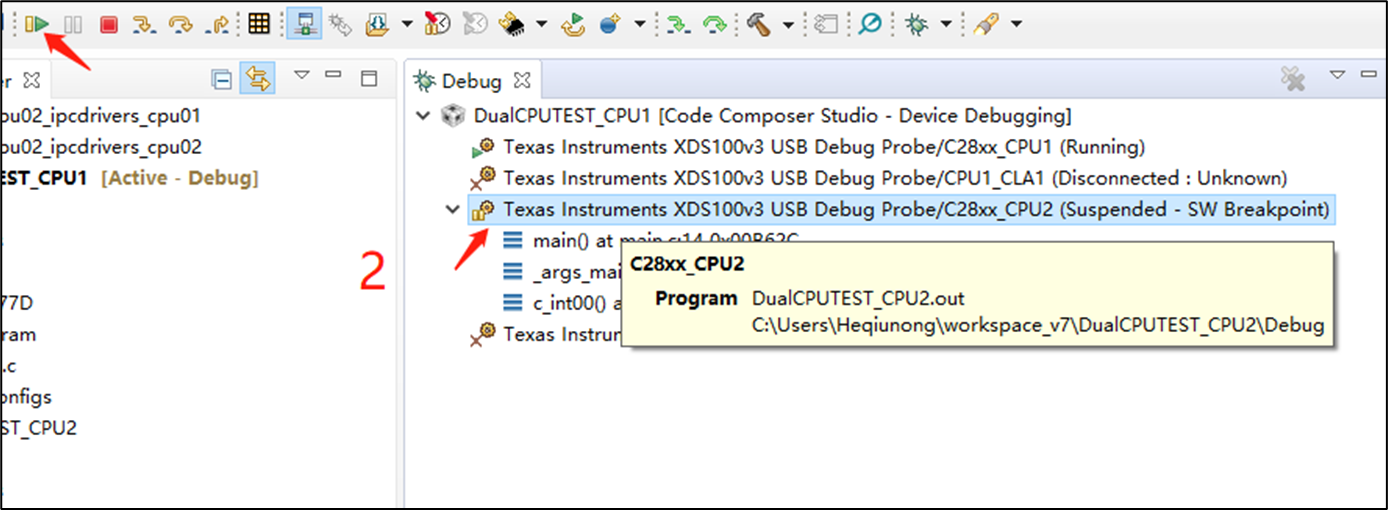
这样,就是双核在线模式的主要流程了
另外还有一个段代码需要注意
GPIO_SetupPinMux(111, GPIO_MUX_CPU2, 0);
这句话的意思应该是说,CPIO111复用给CPU2,里面各种指针满天飞,主要是设置偏移地址。
没这句话, CPU2里面对GPIO置位和清零操作是不起作用的。
4. CPU1 + CPU2 实现“双核”+ 离线模式(FLASH)
代码还是用双核在线模式的代码为基础,主要看一下怎么烧写到FLASH里面。
4.1 CMD文件的选择
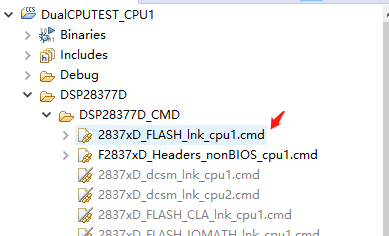
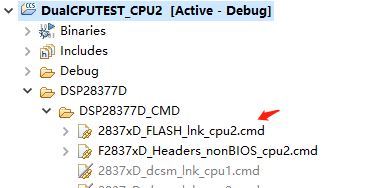
| CPU1工程的CMD
| CPU2工程的CMD
|
4.2 代码需要注意的地方
CPU1工程添加两个预定义宏, CPU2工程需要添加一个预定义宏
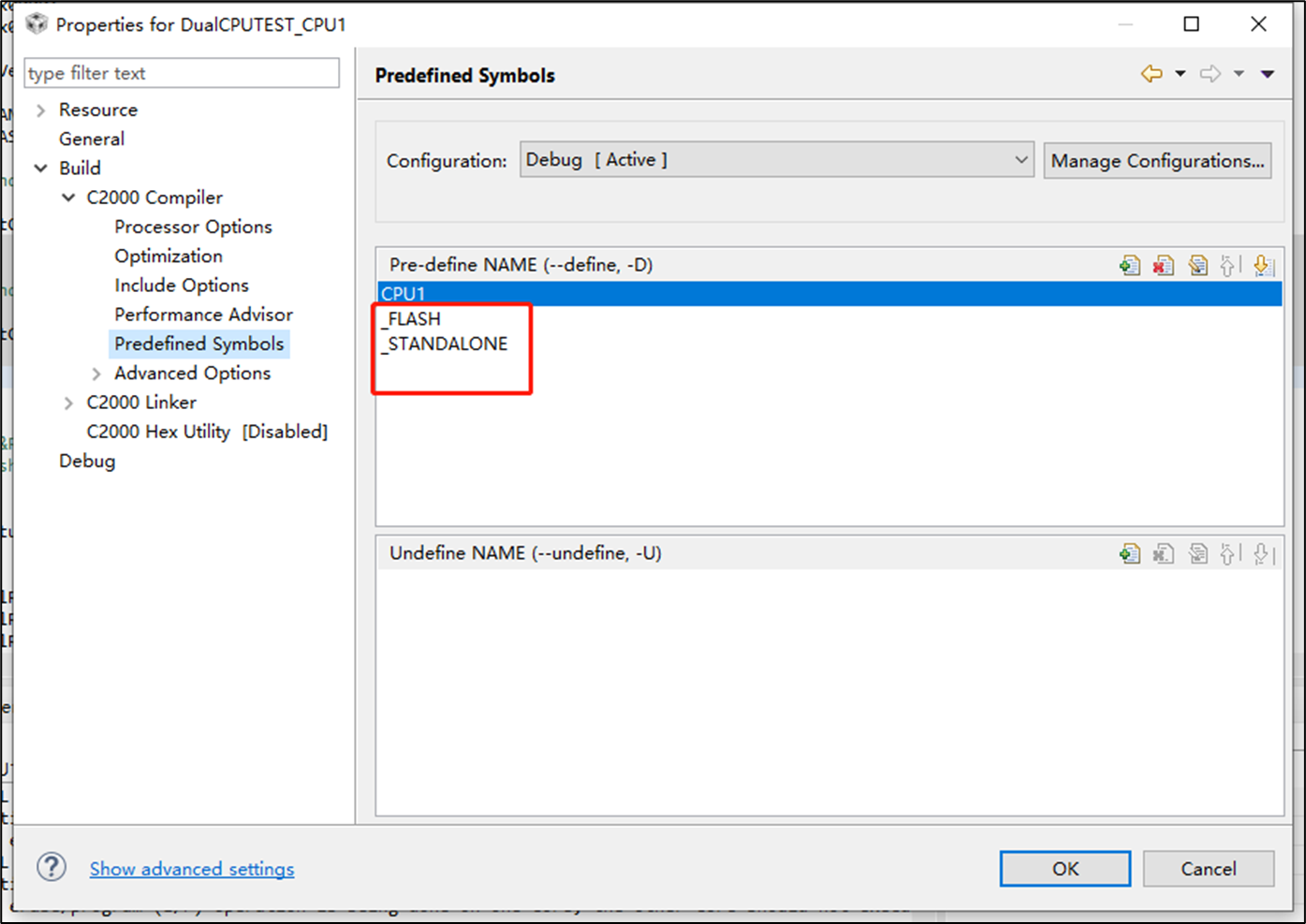
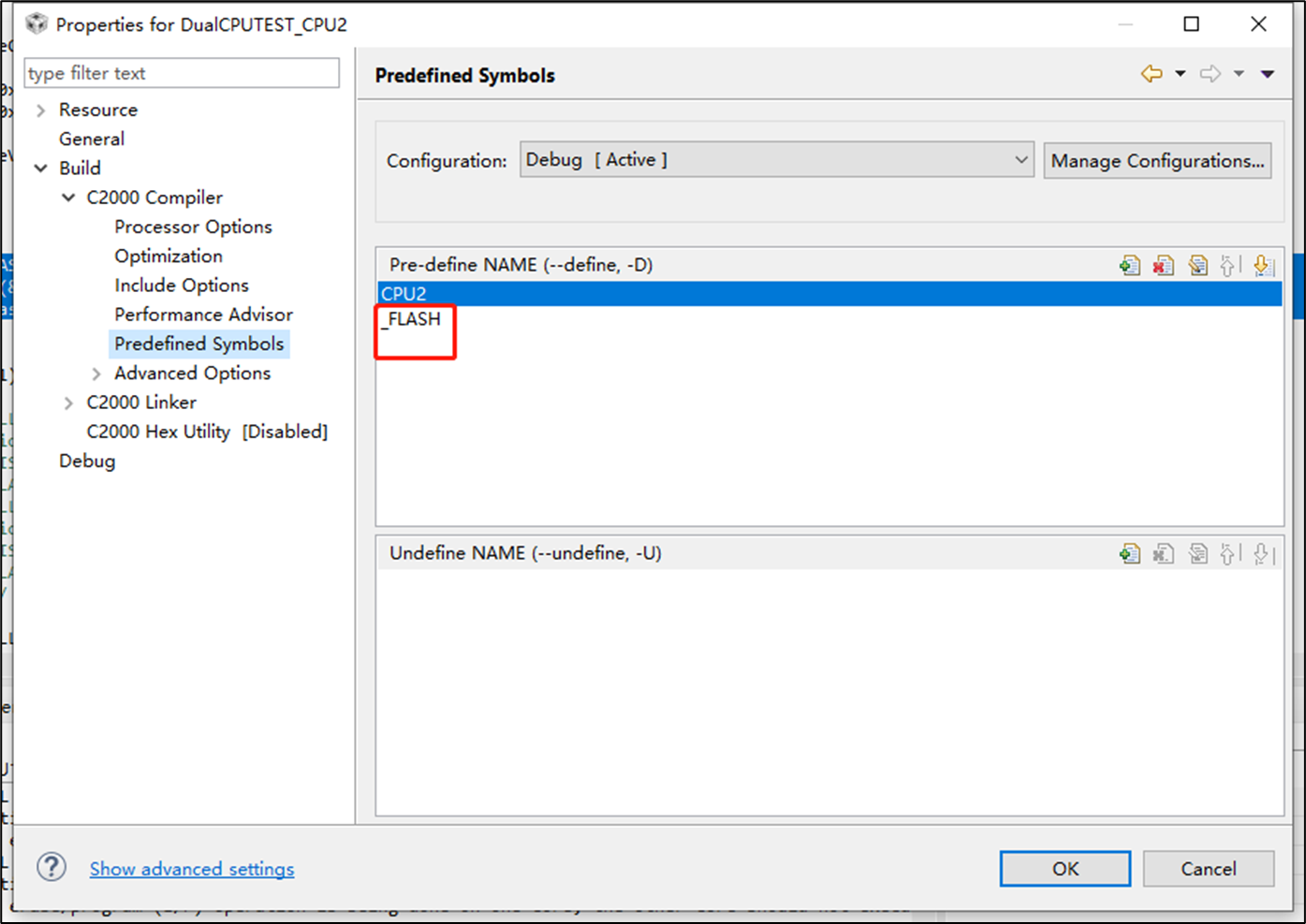
强烈建议用上述方式去配置。
为什么呢? 因为你直接在main.c里面配置的话,包含InitSysCtrl的这个文件找不到_FLASH这个宏。
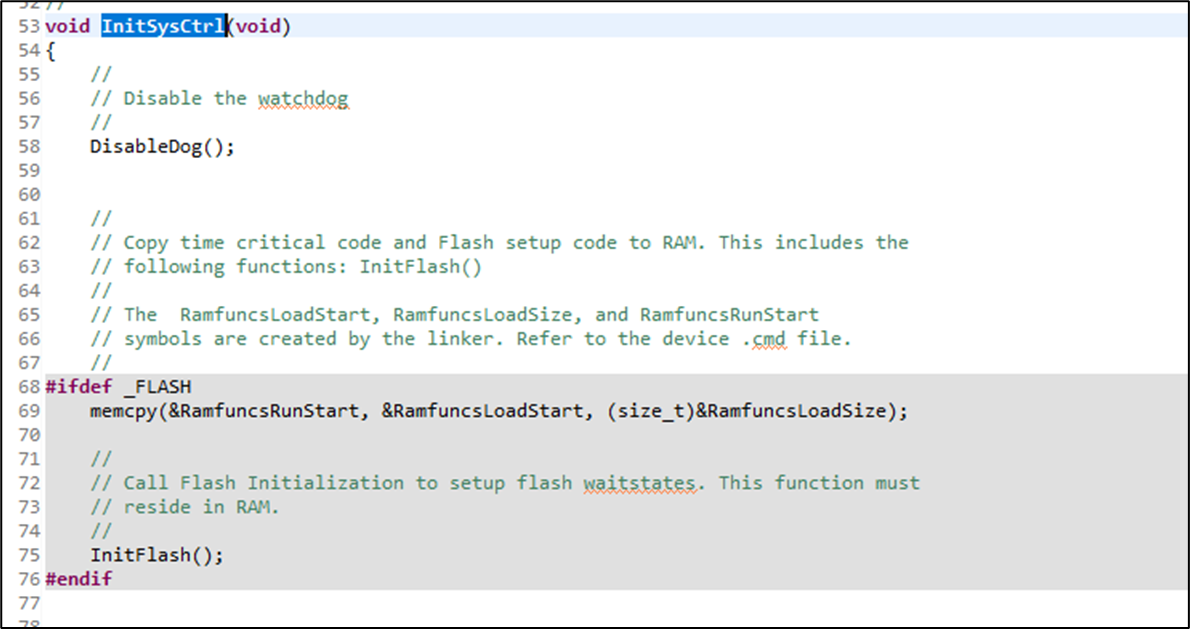
这个灰色的块,意思就是_FLASH没有被定义。
我尝试写一个main.h文件,把宏定义放在那里面。同时,Include Options把main.h的路径添加进去,但是还是找不到。
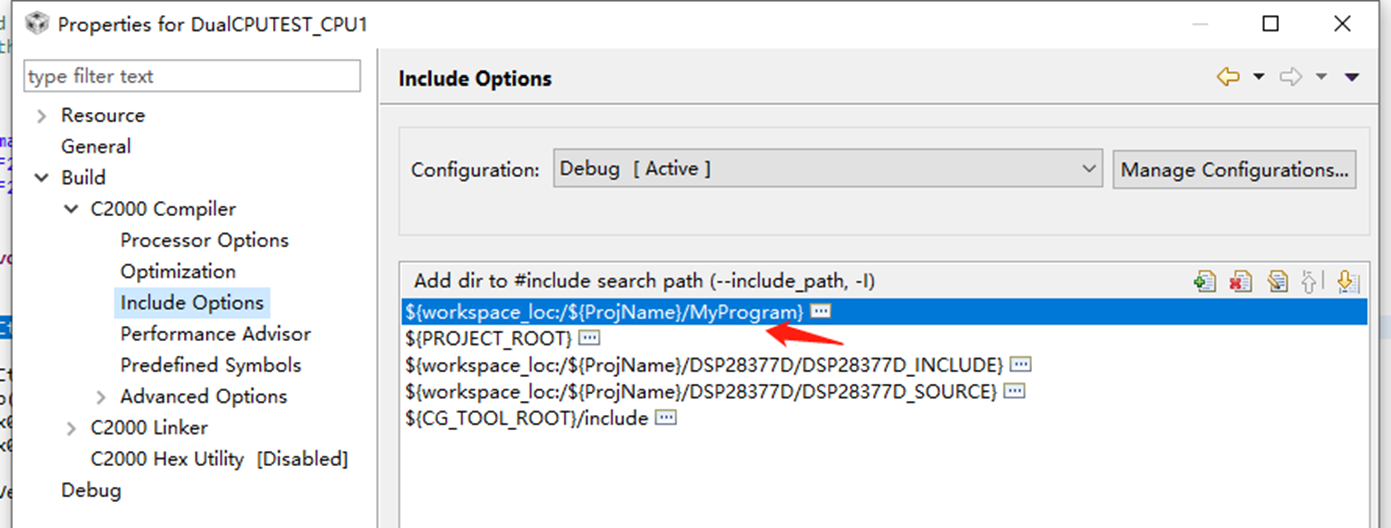
但在F2837xD_SysCtrl.c文件里面#include "main.h"就可以,后面再酌情优化一下吧。
以下是关键代码:
CPU1里的
#include "F2837xD_Ipc_drivers.h"#ifdef _STANDALONE
#ifdef _FLASH
//
// Send boot command to allow the CPU02 application to begin execution
//
IPCBootCPU2(C1C2_BROM_BOOTMODE_BOOT_FROM_FLASH); 这行会被执行
#else
//
// Send boot command to allow the CPU02 application to begin execution
//
IPCBootCPU2(C1C2_BROM_BOOTMODE_BOOT_FROM_RAM);
#endif
#endif
CPU2工程里的
#ifdef _FLASH
memcpy(&RamfuncsRunStart, &RamfuncsLoadStart, (size_t)&RamfuncsLoadSize);
InitFlash();
#endif
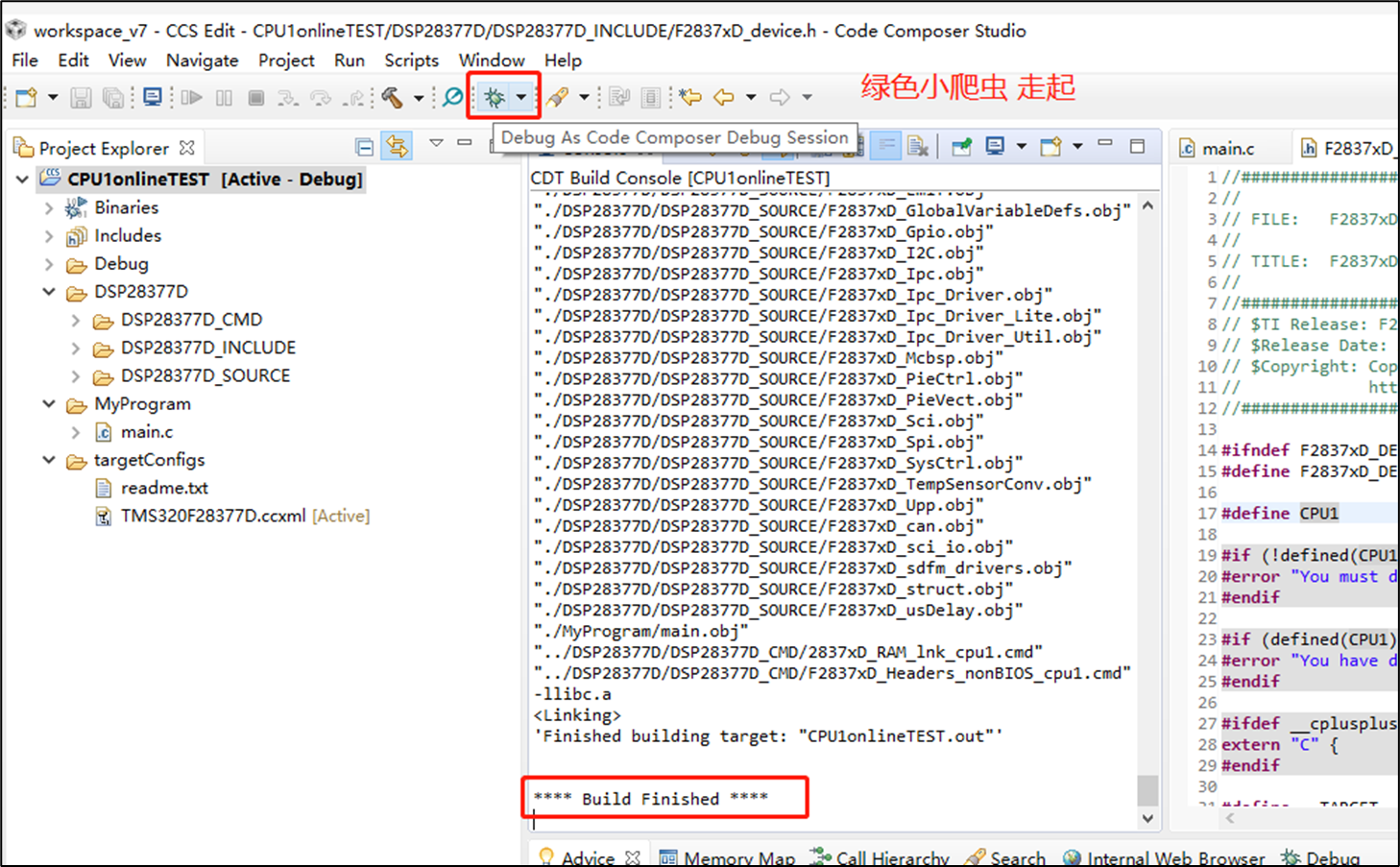
烧写和在线模式一样, CPU1工程启动绿色小爬虫, 然后再把CPU2的程序换成已编译好的CPU2工程的.out文件。
值得注意的是,这种模式无法在线调试,加断点什么的。 拔掉仿真器,然后断电重启,就可以正常跑起来了。
那如果要在线调试呢? 可以把_STANDALONE的预定义去掉,就可以了。



















 1490
1490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











