






 本文详细探讨了激光雷达与图像光束法在误差方程构建上的差异,重点介绍了利用特征值优化点到线和点到面距离的方法,以及如何通过二阶求导计算位姿变化对特征值的影响。文章展示了特征值求导和泰勒展开在BA优化中的应用。
本文详细探讨了激光雷达与图像光束法在误差方程构建上的差异,重点介绍了利用特征值优化点到线和点到面距离的方法,以及如何通过二阶求导计算位姿变化对特征值的影响。文章展示了特征值求导和泰勒展开在BA优化中的应用。
这篇文档推导起来需要个一整天时间,懵逼一上午,推导一下午。
目录
一. 前言
1) 激光雷达的光束法平差和 图像的光束法平差对比
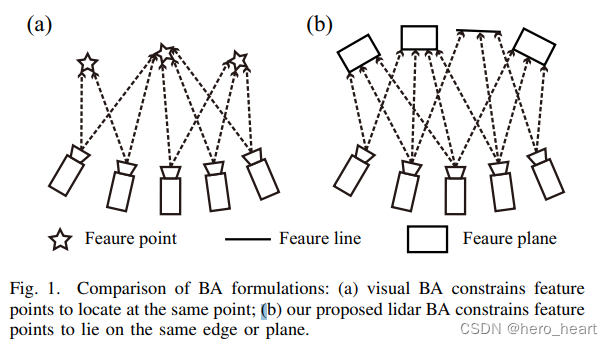
差异是,图像使用投影误差来构建误差方程,优化帧位姿和地图点位置。
激光雷达则是使用点到线和点到面的距离来构建误差方程,只优化当前帧位姿。
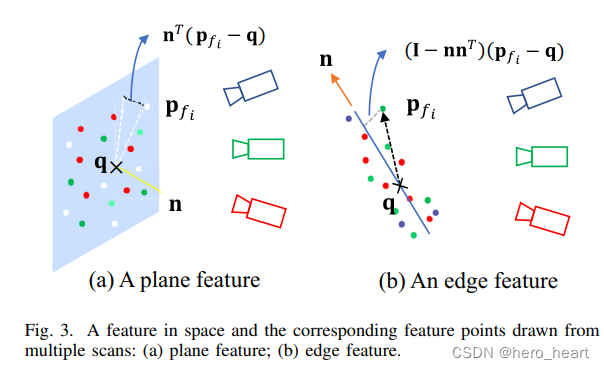
2)点到线和点到面的距离构建
3)三个贡献
(1)相比于图像光束法,激光雷达的光束法只优化位姿,优化参数的维度很小。使快速大尺度稠密特征点优化成为可能。(因为只优化位姿)。
(2) 为确保高效BA,构建了二阶海森矩阵来求解。
(3) 提出了一个自适应体素搜索来进行高效的特征关联。
(4) 整合进loam,在固定式激光雷达和旋转激光雷达上做了测试,证明了取得的效果,在一个滑动窗口(20帧)内,做局部的BA,可以达到10HZ.
二. 方法
1) 点到线、点到面误差方程构建--->转到特征值上
把点变换到全局中:

构建的点到面的误差方程:
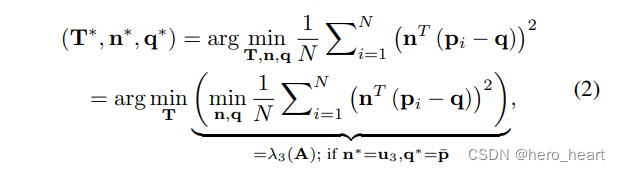
其中认为q的最优值为pi的平均坐标,lamaba3为最小特征值,n的最优值为对应的特征向量,此时n相当于是平面法向。
构建的点到线的误差方程:
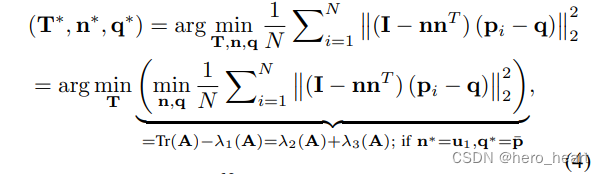
其中认为q的最优值为pi的平均坐标,lamaba1为最大特征值,n的最优值为对应的特征向量,此时n相当于是三维线的方向。Tr(A)为A的三个对角线元素的和,也等于三个特征值的和,因此Tr(A)-lamaba1 = lamaba2+ lamaba3.
从公式3和公式4来看,q点移动并不影响最终的点到面的距离的长度 和 点到线的距离的长度,因此q的值是不唯一的,但是这不影响优化参数。 因此激光雷达的BA优化方程变成了最小化矩阵A的特征值:

2) 特征值对点pi的一阶求导
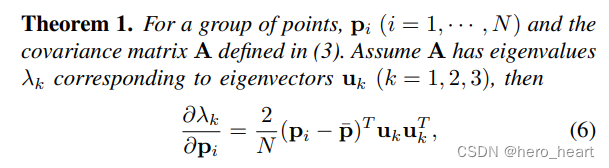
具体推导为:
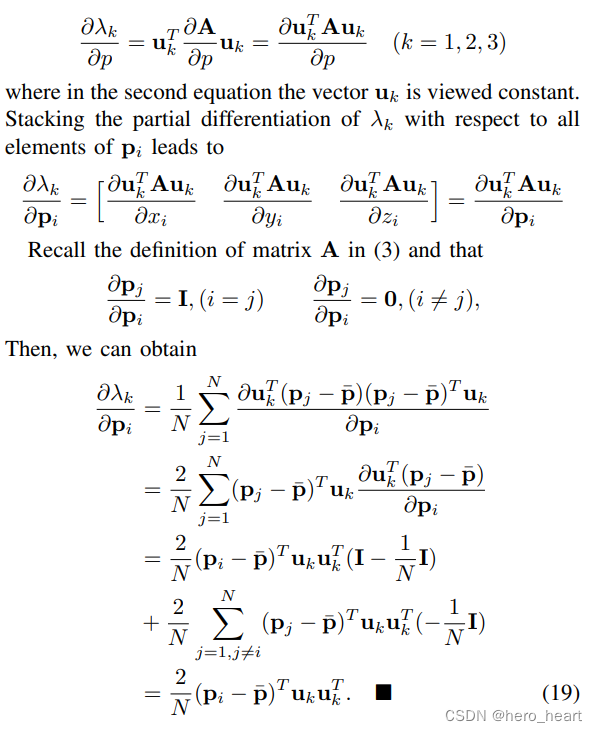
这个公式不难理解,公式(19)的第一行其实可以展开成(pi-p)*uk*uk*(pi - p拔) + (pj-p)*uk*uk*(pj- p拔)两个相加项分别对pi进行求导就得到公式(19)中中的第3行和第四行,相加后由于所有pi相加就等于p拔,所以相加后就只剩下公式(19)中的最后一行了。这一部分很好理解。这一部分就是一阶导了。
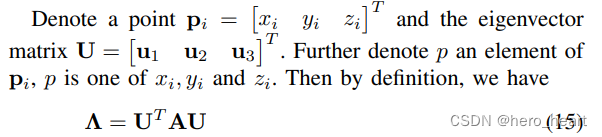
3)appendix A中的公式推导
(1)由于 A* U = LAMABA* U, LAMABA为三个特征值所构建的对角矩阵,所以 UT* A* U = LAMABA
4)特征值对P点的求导,计算c(m,n)
注意后续P点会对旋转和平移求导,这里先对P点进行求导。三个乘数项分别对p进行求导得到:

根据公式(15),可以得到:

所以 公式(16)就变成了:

(1) 特征向量矩阵U对P的求导,
U对特征值对应的特征向量所形成的矩阵,因此是一个单位正交矩阵,则:
![]()
公式两边都对P进行求导得到:

简写成:
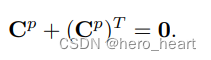

在这里很清楚的要记住一个特点,Cq + CqT = 0 ,则Cq是一个反对称矩阵,则Cq的对角线元素为0。
(4)综合公式(18)和3)中的内容,,可以得到特征值对q的求导为:

(2) 计算C(m,n)的值
根据公式(20), 特征值对角阵C 的非对角元素为0, 非对角元素对q的求导也为0,因此下式左边为0,右边改成具体的(m,n)意思是m行n列。um是第m个特征值对应的特征向量,un是第n个特征值对应的特征向量。

直接移项,因此C(m,n)为:

其中 C是反对称矩阵,因此在对角线上是0.
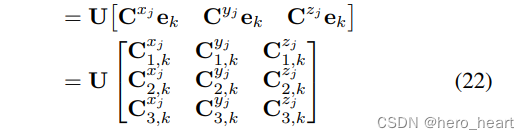
5)计算uk对p的求导
uk = U * e ,在第一个特征值上,e为(1,0,0),在第二个特征值上,e 为(0,1,0),结合U对q的求导【在3)部分中】,得到公式:

q为pj的x,y,z中的其中一个,因此uk对p的求导为:

进一步的替换为:
设置
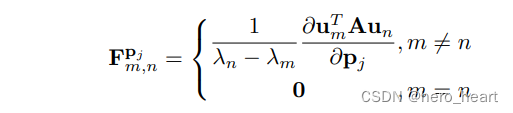
当m=n的时候C(m,n)为0,因为C是反对称矩阵,对角线元素为0,【看3)中说明】
结合公式(19),

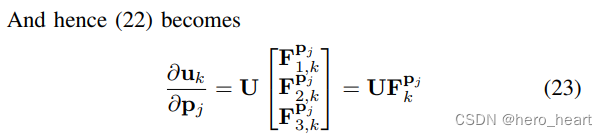
6)得到特征值对点的二阶求导
把公式(19)和公式(23)结合起来,因此二阶导数就出来:
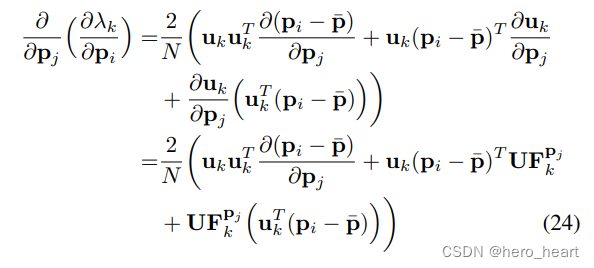
最后作者列了一下这个公式:

其实这个公式不仅用于公式(24),还用于公式(19)的推导。
7)得到点对旋转和平移的求导

这样根据链式求导原理,就可以得到特征值对旋转和平移的求导了。也可以得到二阶和一阶的特征值对旋转和平移的求导了。
8)泰勒二阶展开和求解方程构建
p 是位姿。

J 和H 简化表达为:

对泰勒展开进行求导,用一阶和二阶系数计算结果
![]()
至此整个推导完毕。















 1310
1310











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









