







自己(大学生)在校做的实验报告,可借鉴使用,下载资源后可自行增删内容,或按照个人喜好优化排版。内容包括霍尔位置传感器的定标和杨氏模量的测量相关的实验目的、实验数据记录与分析、实验结论等。
一、实验目的
1.加深对霍尔传感器原理应用的认识
2.学会新型传感器的定标
3.测量并计算出实验所用的铜片的杨氏模量
二、实验原理
1.
(K为元件的霍尔灵敏度)。若保持霍尔元件的电流I不变,而使其在一个均匀梯度的磁场中移动时,则输出的霍尔势差变化量为
(ΔZ是位移量),此时
与ΔZ成正比。
2. 为实现均匀梯度的磁场,应用两块相同的磁铁(磁铁截面积及表面磁感应强度相同)相对放置,即极与极相对,两磁铁之间留一等间距隙,霍尔元件平行于磁铁放在该间隙的中轴上间隙大小要根据测量范围和测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就越高。磁铁截面要远大于霍尔元件,以尽可能的减小边缘效应影响,提高测量精确度。
3. 若磁铁间隙内中心截面处的磁感应度为0,霍尔元件处于该处时,输出的霍尔电势差应该为0。当霍尔元件偏离中心沿z轴发生位移时,由于磁感应强度不再为0,霍尔元件也就产生相应的电势差输出,其大小可以用数字电压表测量。由此可以将霍尔电势差为0时元件所处的位置作为位移参考零点。霍尔电势差与位移量之间存在一一对应关系,当位移量较小(<2mm),这一一对应关系具有良好的线性。
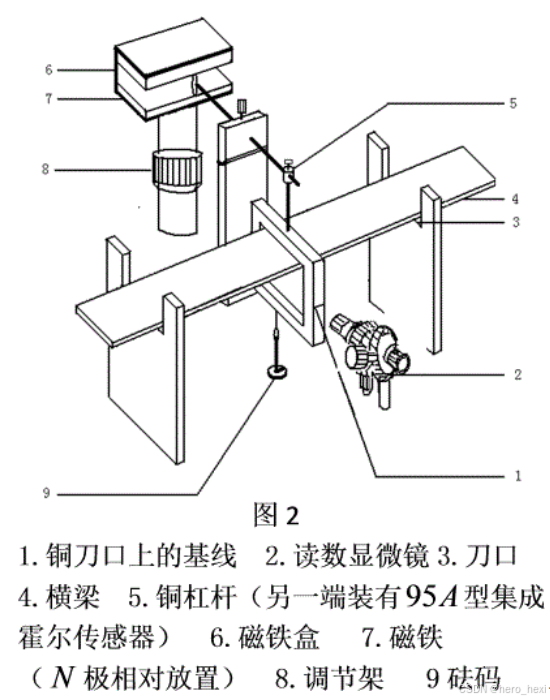
4.相关图示
5.. 在横梁弯曲的情况下,杨氏模量:
(I)
(其中:d为两刀口之间的距离;M为所加砝码的质量;a为梁的厚度;b为梁的宽度;ΔZ为梁中心由于外力作用而下降的距离;g为重力加速度)
三、实验设备及器材
实验要用到FD—HY—I型霍尔位置传感器杨氏模量测定仪,包括:
1.霍尔位置传感器测杨氏模量装置一台(底座固定箱、读数显微镜、95A型集成霍尔位置传感器、磁铁两块、支架、砝码盘、砝码等)
2.霍尔位置传感器输出信号测量仪一台(包括直流数字电压表)
四、实验过程及数据记录
1.实验过程
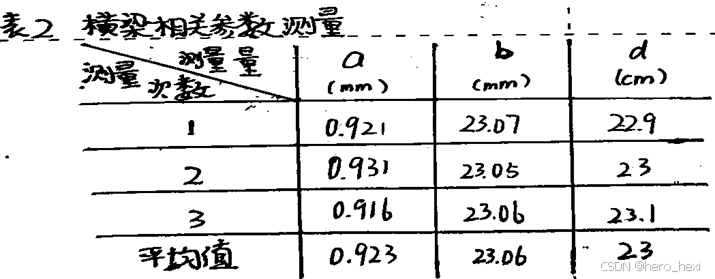
(1)用直尺测量两刀口之间的距离d,游标卡尺测其宽b,千分尺测其厚度a,测量数据分别记入表2。利用己经标定的数值,测出铜片样品在重物作用下的位移,测量数据填入表1。
(2)将铜片(或铝片)穿过铜框,铜框置于两立柱刀口的中央位置,铜框内的刀口置于梁的中间,将圆柱形托尖放在铜框上的小圆洞内;调节铜杠杆,使其水平。
(3)调节磁铁的高度,使霍尔位置传感器(在铜杠杆的一端)处于磁场中间位置。调节三维调节架的上下前后位置的调节螺丝,使集成霍尔位置传感器探测元件处于磁铁中间的位置。
(4)调节霍尔位置传感器的毫伏表。磁铁盒上可上下调节螺丝使磁铁上下移动,当毫伏表读数值很小时,停止调节固定螺丝,最后调节调零电位器使毫伏表读数为零。
(5)调节读数显微镜,使眼睛观察十字线及分划板刻度线和数字清晰。然后移动读数显微镜前后距离,使能清晰看到铜刀上的基线。转动读数显微镜的鼓轮使刀口架的基线与读数显微镜内十字刻度线吻合,记下初始读数值。
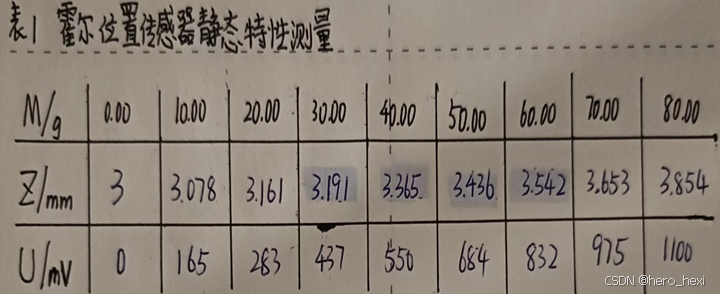
(6)逐次增加砝码(每次增加10g砝码),相应从读数显微镜上读出梁的弯曲位移ΔZ及数字电压表相应的读数值
(单位:mV),以便于计算杨氏模量和霍尔位置传感器进行定标。
(7)测量横梁两刀口间的长度d及测量不同位置横梁宽度b和横梁厚度a。
(8)用逐差法按公式(I)进行计算,求得铜片材料的杨氏模量。并求出霍尔位置传感器的灵敏度。
(9)把测量结果与公认值进行比较。
2.数据记录
五、实验数据处理与分析
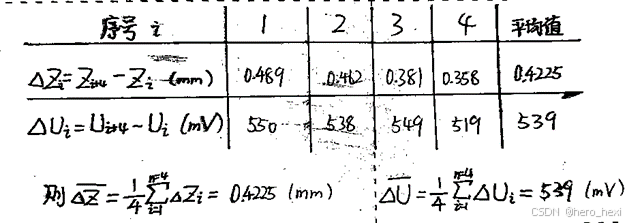
基于以上数据,可以计算出该实验所用的霍尔位置传感器灵敏度为:
同时计算出铜的杨氏模量
六、实验结论
查得铜的公认杨氏模量值,与实验结果相比误差较小,表明实验的测量数据较为准确,所计算出的铜的杨氏模量结果较好。

















 251
251

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









