







 本文详细探讨了无人驾驶系统面临的安全威胁,包括传感器、操作系统、控制系统和车联网通信系统的安全问题。介绍了各种攻击手段,如对传感器的欺骗、对操作系统的入侵以及对CAN总线的劫持,并提出相应的防御措施,如多传感器融合、使用安全操作系统和加密验证等。此外,还讨论了车联网通信安全和安全模型校验方法的重要性。
本文详细探讨了无人驾驶系统面临的安全威胁,包括传感器、操作系统、控制系统和车联网通信系统的安全问题。介绍了各种攻击手段,如对传感器的欺骗、对操作系统的入侵以及对CAN总线的劫持,并提出相应的防御措施,如多传感器融合、使用安全操作系统和加密验证等。此外,还讨论了车联网通信安全和安全模型校验方法的重要性。
作者:刘少山,李文超,唐洁
责编:何永灿,欢迎人工智能领域技术投稿、约稿、给文章纠错,请发送邮件至heyc@csdn.net
本文为《程序员》原创文章,未经允许不得转载,更多精彩文章请订阅2017年《程序员》
目前针对无人车攻击的方法有许多,如何防御这些攻击以保证无人车的安全是个重要的课题。本文是无人驾驶技术系列的第九篇,详细介绍针对无人车传感器、操作系统、控制系统、车联网的攻击手段以及防御方法。
针对无人驾驶的安全威胁
对于无人驾驶系统来说,安全性至关重要。任何无人车如果达不到安全要求就上路是极其危险的。目前,针对无人车攻击的方法五花八门,渗透到无人驾驶系统的每个层次,包括传感器、操作系统、控制系统、车联网通信系统等。首先,针对传感器的攻击不需要进入无人驾驶系统内部,这种外部攻击法技术门槛相当低,既简单又直接。 第二,如果进入无人驾驶操作系统,黑客可以造成系统崩溃导致停车,也可以窃取车辆敏感信息。第三,如果进入无人驾驶控制系统,黑客可以直接操控机械部件,劫持无人车去伤人,是极其危险的。第四,车联网连接不同的无人车,以及中央云平台系统,劫持车联网通信系统也可以造成无人车间的沟通混乱。本文将详细介绍每种攻击手段,并且讨论相应的防御方法。
无人驾驶传感器的安全
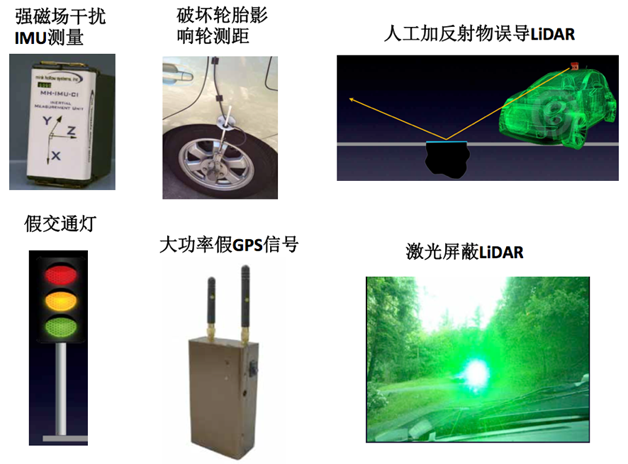
由于传感器处于整个无人驾驶计算的最前端,最直接攻击无人车的方法就是攻击传感器。这种外部攻击法并不需要入侵到无人驾驶系统内部,使得入侵的技术门槛相当低。正是因为入侵的门槛低,我们需要在传感器做大量的工作来保证其安全。如图1所示,对各种传感器,我们都可以轻易地攻击与误导。无人驾驶系列文章《GPS及惯性传感器在无人驾驶中的应用》(《程序员》2016年9月)提到可以使用惯性传感器IMU辅助无人驾驶定位,但是IMU对磁场很敏感,如果使用强磁场干扰IMU,就有可能影响IMU的测量。对于GPS,如果在无人车附近设置大功率假GPS信号,就可以覆盖原来的真GPS信号,从而误导无人车定位。通过两种简单攻击方法的结合,GPS与IMU的定位系统会轻易被攻破。除了GPS与IMU外,通常我们也可以使用轮测距技术辅助无人车定位。轮测距是通过测量轮子的转速乘与轮子的周长进行测距,如果黑客破坏了轮子,这个定位辅助技术也会受影响。
无人驾驶系列文章《光学雷达(LiDAR)在无人驾驶技术中的应用》(《程序员》2016年4月)提到激光雷达是目前无人驾驶最主要的传感器,而无人车也依赖于激光雷达数据与高精地图的匹配进行定位。但激光雷达也可以轻易地被干扰。首先激光雷达是通过测量激光反射时间来计算深度的。如果在无人车周围放置强反光物,比如镜子,那么激光雷达的测量就会被干扰,返回错误信息。除此之外, 如果黑客使用激光照射激光雷达,测量也会受干扰,会分不清哪些是自身发出的信号,哪些是外部激光的信号。另外,无人车会不断下载更新的高精地图,如果黑客把下载的地图掉包,也会造成定位失效。
无人驾驶系列文章《基于计算机视觉的无人驾驶感知系统》(《程序员》2016年7月&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5388
5388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









