








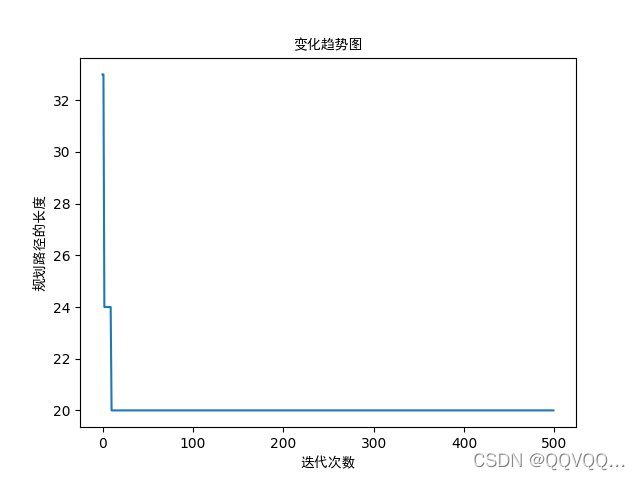
最终结果如下图
代码如下:
import numpy as np
import matplotlib.pyplot as plt
epsilon = 0.8
gamma = 0.1
lr = 0.1
distance = np.array([[0, 7, 6, 1, 3], [7, 0, 3, 7, 8], [6, 3, 0, 12, 11], [1, 7, 12, 0, 2], [3, 8, 11, 2, 0]])
R_table = 11 - distance
space = [0, 1, 2, 3, 4]
Q_table = np.zeros((5, 5))
# 进行训练同时测试训练成果
iterate_results = [] # 保存每次测试结果
for i in range(500):
print(f"开始第{i + 1}回合。。。")
# 初始位置
path = [0]
# 每个回合要获取4个位置
for j in range(4):
s = path[j] # 当前位置
s_row = Q_table[s] # 当前位置对应的Q表中的行
remain = set(space) - set(path) # 剩余节点
max_value = -1000
# 在剩余节点中遍历最大值
a = 0
# 利用贪婪策略选择下一行动
for rm in remain:
Q = Q_table[s, rm]
if Q > max_value:
max_value = Q
a = rm
# 随机选择下一行动
if np.random.uniform() < epsilon:
a = np.random.choice(np.array(list(set(space) - set(path))))
# 更新Q表
if j != 3:
Q_table[s, a] = (1 - lr) * Q_table[s, a] + lr * (R_table[s, a] + gamma * max_value)
else:
Q_table[s, a] = (1 - lr) * Q_table[s, a] + lr * R_table[s, a]
path.append(a)
Q_table[a, 0] = (1 - lr) * Q_table[a, 0] + lr * R_table[a, 0]
# 末尾位置
path.append(0)
# 根据当前Q表获取最佳路径距离
result = [0]
for k in range(4):
loc = result[-1]
remain1 = set(space) - set(result) # 剩余节点
max_value1 = -1000
# 在剩余节点中遍历最大值
a = 0
# 利用贪婪策略选择下一行动
for v in remain1:
Q_ = Q_table[loc, v]
if Q_ > max_value1:
a = v
max_value1 = Q_
result.append(a)
result.append(0)
length = 0
for v in range(1, 6):
length += distance[result[v - 1], result[v]]
print(f"距离为:{length}")
iterate_results.append(length)
# 根据Q表输出最佳路径
result = [0]
for i in range(4):
loc = result[-1]
remain1 = set(space) - set(result) # 剩余节点
max_value1 = -1000
# 在剩余节点中遍历最大值
a = 0
# 利用贪婪策略选择下一行动
for v in remain1:
Q_ = Q_table[loc, v]
if Q_ > max_value1:
a = v
max_value1 = Q_
result.append(a)
result.append(0)
length = 0
for v in range(1, 6):
length += distance[result[v - 1], result[v]]
print(f"最终路径安排为:{result} 距离为:{length}")
# 绘图
fig, ax = plt.subplots()
ax.plot(iterate_results)
plt.title("变化趋势图", fontproperties='SimHei', fontsize=10)
plt.xlabel("迭代次数", fontproperties='SimHei', fontsize=10)
plt.ylabel("规划路径的长度", fontproperties='SimHei', fontsize=10)
plt.show()

















 1571
1571

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









