






这一篇主要介绍最小特征值角点检测算法。
函数/Function
函数名称:detectMinEigenFeatures
功能:利用最小特征值算法(Minimum eigenvalue algorithm)检测角点
语法:
语法:points = detectMinEigenFeatures(I);
points = detectMinEigenFeatures(I,Name,Value);
其中,I为2-D灰度图像,points为返回的Harris角点检测算法检测到的特征点,Name必须为用单引号对包含的如下字符串名称,Vaule为对应Name的值
| Name | Value |
|---|---|
| 'MinQuality' | 范围0-1,默认值为0.01,表示可接受的角点是满足检测测度值为大于等于图像中最大检测测度值的比例,较大时可以减少误检 |
| 'FilterSize' | 范围为[3,min(size(I)],默认值为5,表示高斯滤波器的窗口大小参数,即FilterSize x FilterSize,并且高斯滤波器的标准差定义为FilterSize/3 |
| 'ROI' | 默认为[1,1,size(I,1),size(1)],表示进行角点检测的图像区域 |
Img = imread('cameraman.tif');
corners = detectMinEigenFeatures(Img);
imshow(Img); hold on;
plot(corners.selectStrongest(50)); 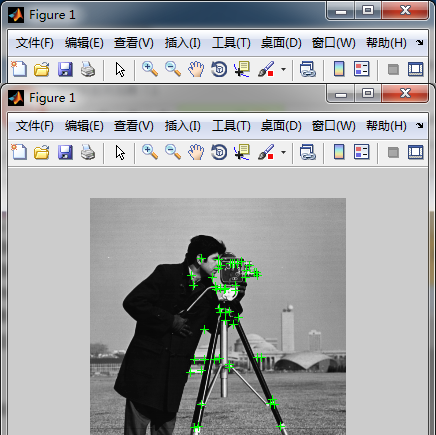


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









