






第一章:车辆纵向控制
1. 纵向力学分析:
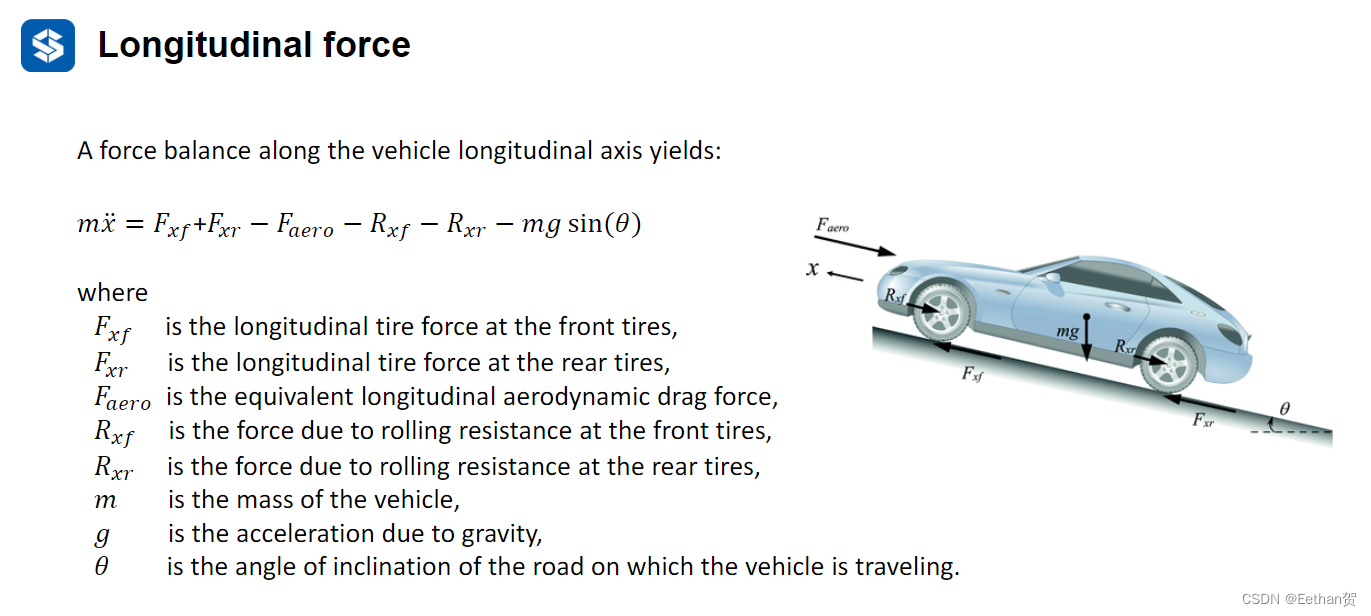
其中,f 代表前轮,r 代表后轮,R 代表滚动阻力,Faero 代表空气阻力。
(1)Faero 空气阻力:
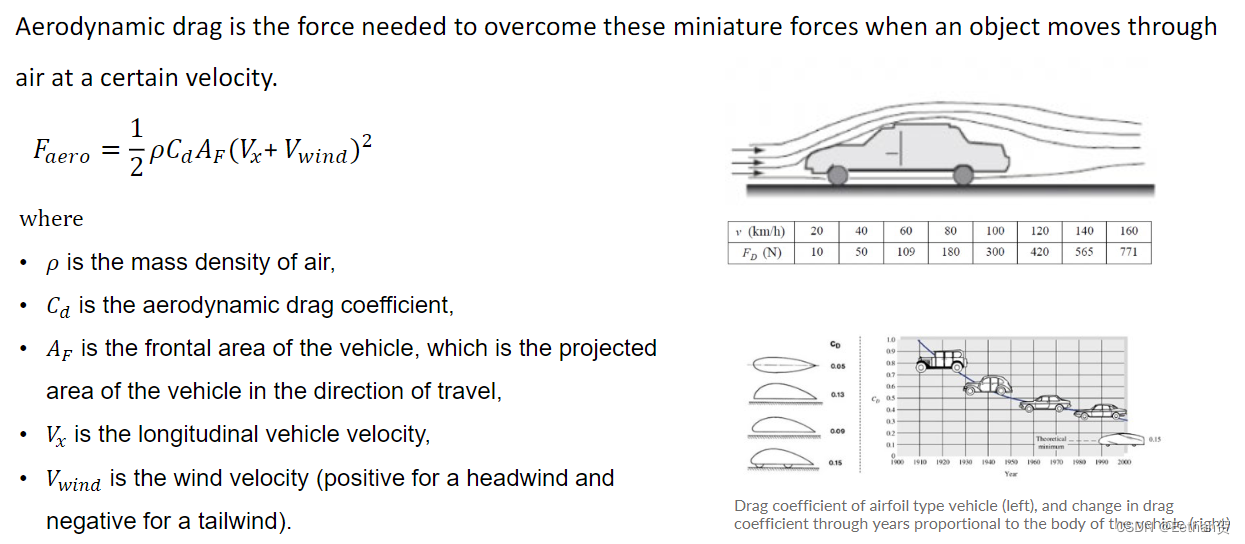
其中,Cd 代表空阻系数,一般车辆为0.28左右,Af为空阻面积。
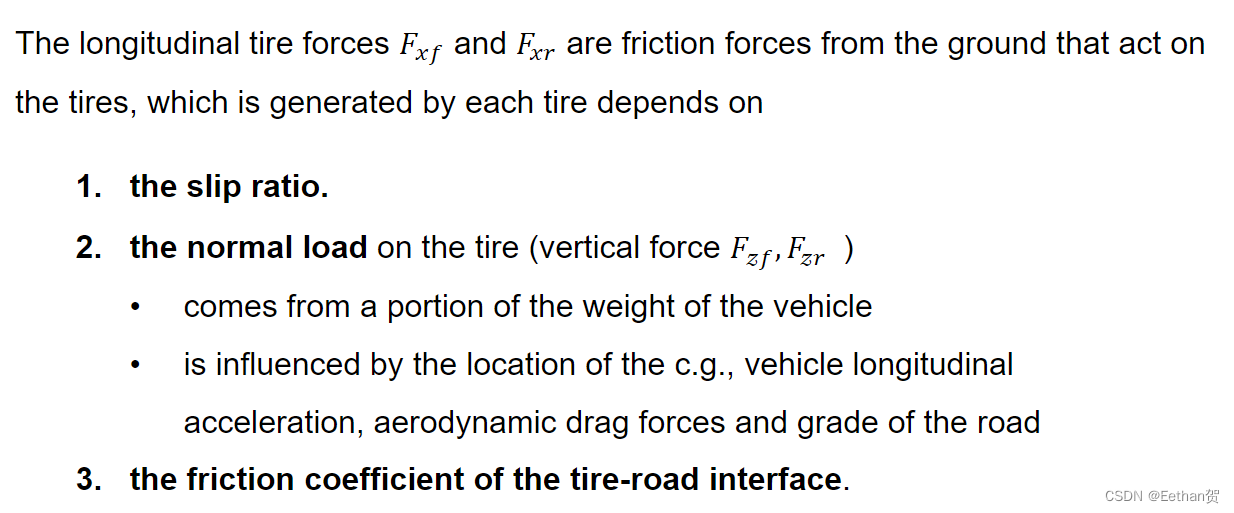
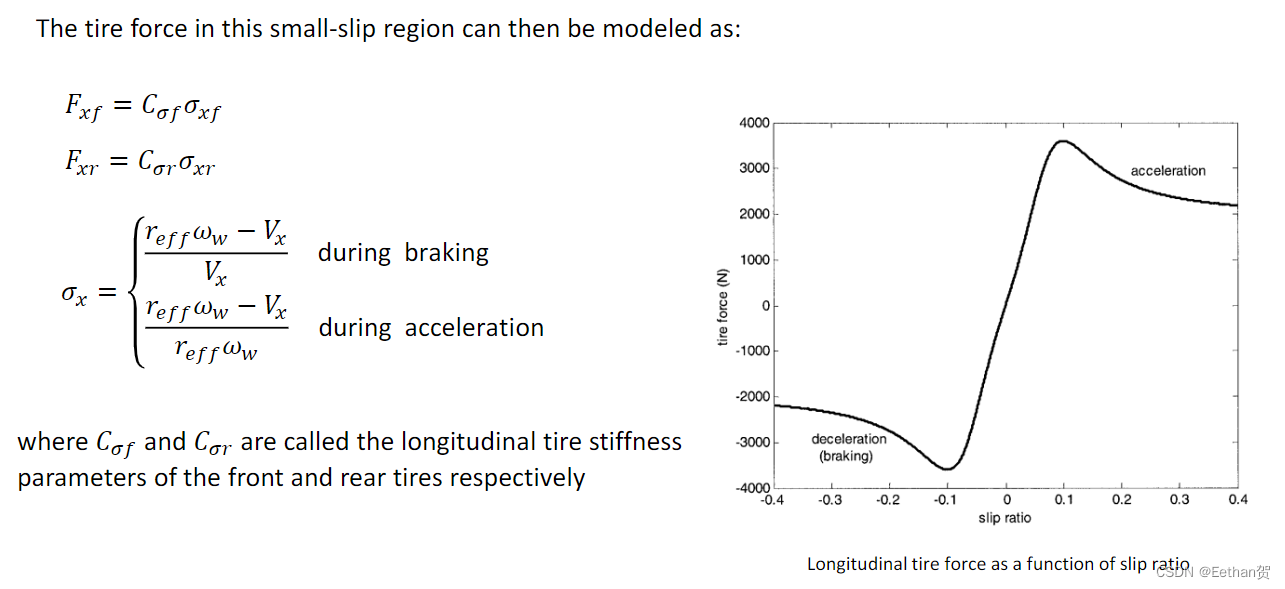
(2)Fxf 和 Fxr 车辆纵向力:
取决于滑动力,轮胎的法向载荷,路面的摩擦系数。
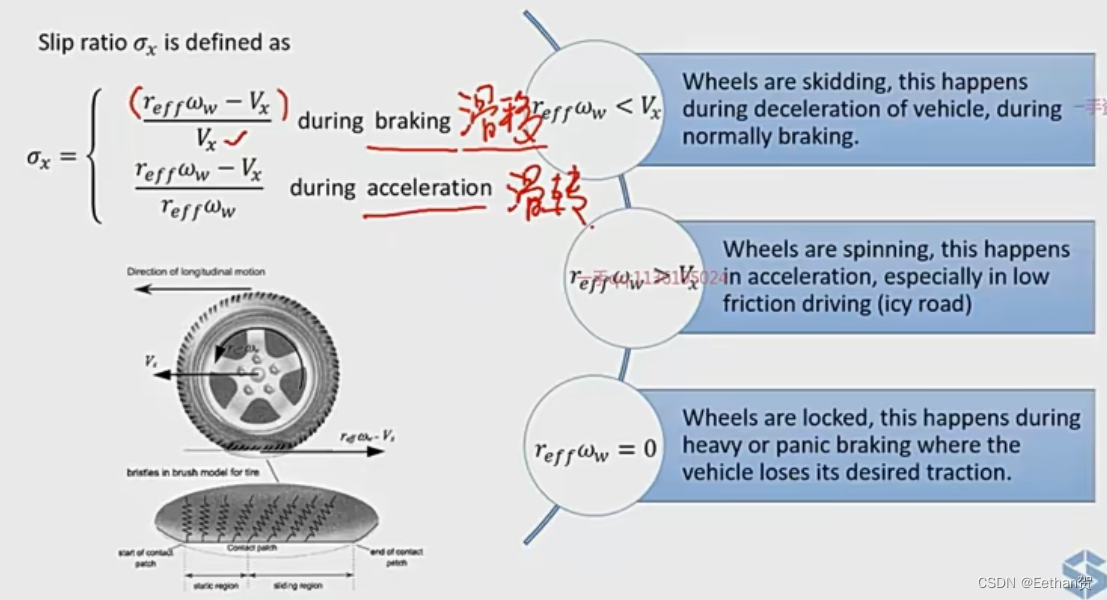
针对于滑动力 slip radio ,取决于两个关键参数:滑移率 和 滑转率。两个的参数的具体公式,一个针对于制动工况,是轮胎纯转动的速度减去车速再比上轮胎纯转动速度或者车速,一个针对于加速工况,实际速度与理论速度的差值比上实际速度。
 如何从滑动率得到滑动力?使用以下公式:
如何从滑动率得到滑动力?使用以下公式:
(3)滚动阻力 Rx :
受到车轮负载(法向载荷)Fz,轮胎结构和材料,路面情况影响。
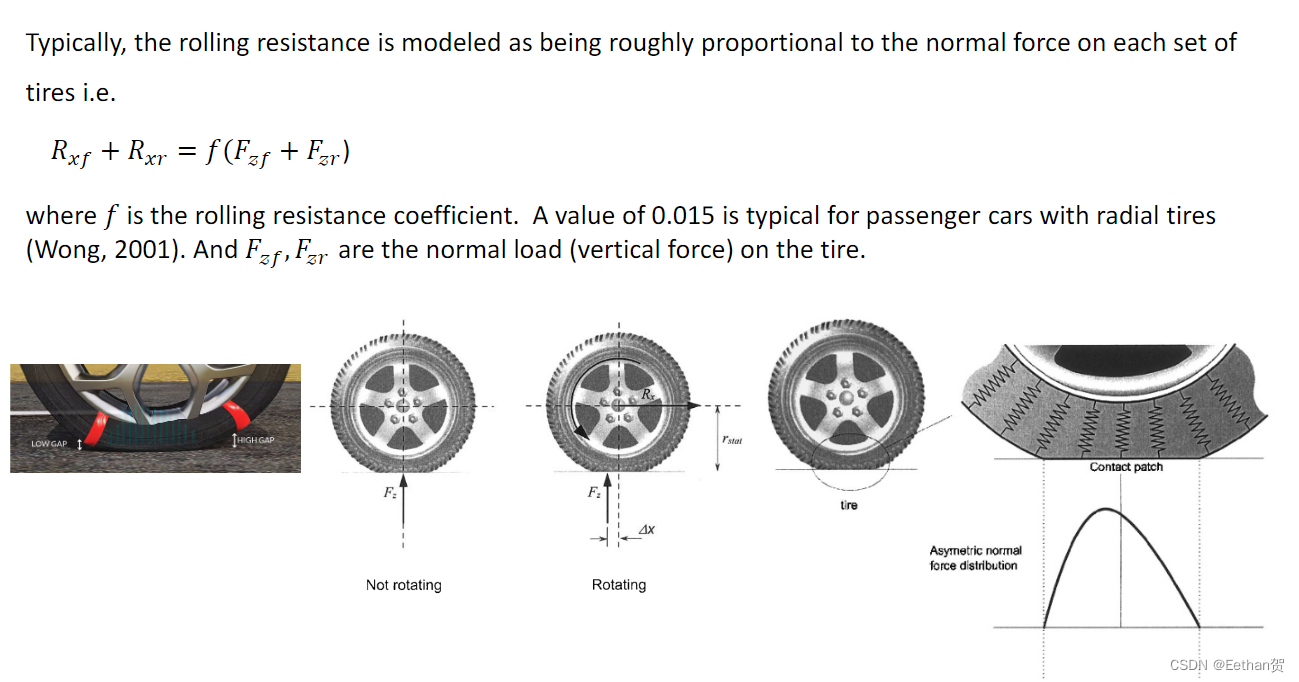
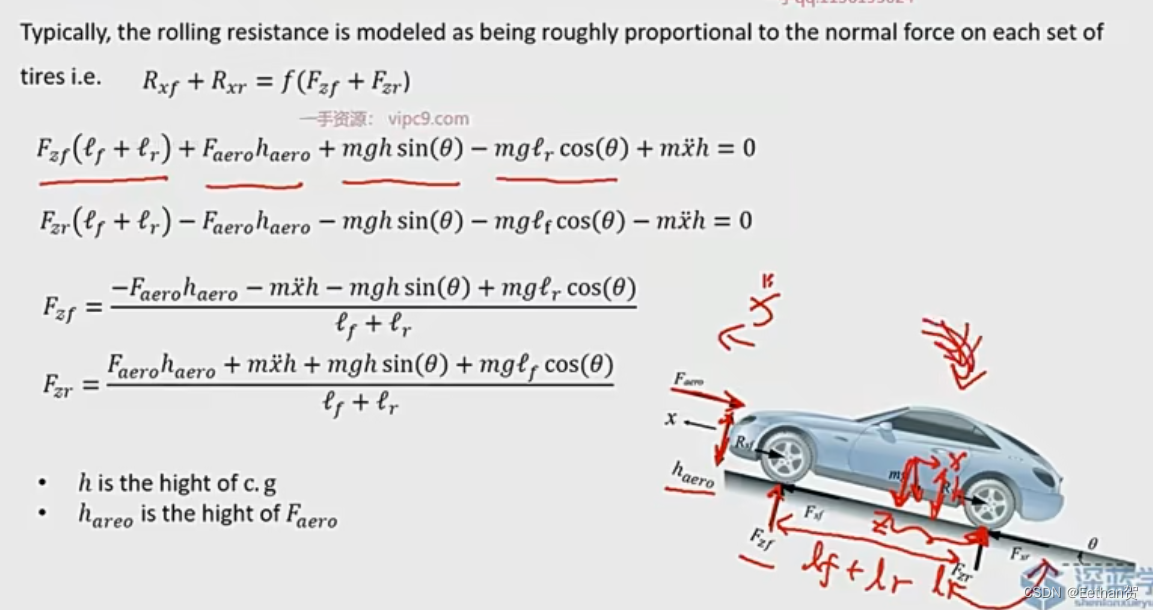
上述公式中, f 为滚动阻力系数,一般为0.015左右。
如何计算法向载荷Fz?
总体思路是对前轮进行力矩分析(以后轮接地中心为接触点),同理于后轮。
2. 控制:
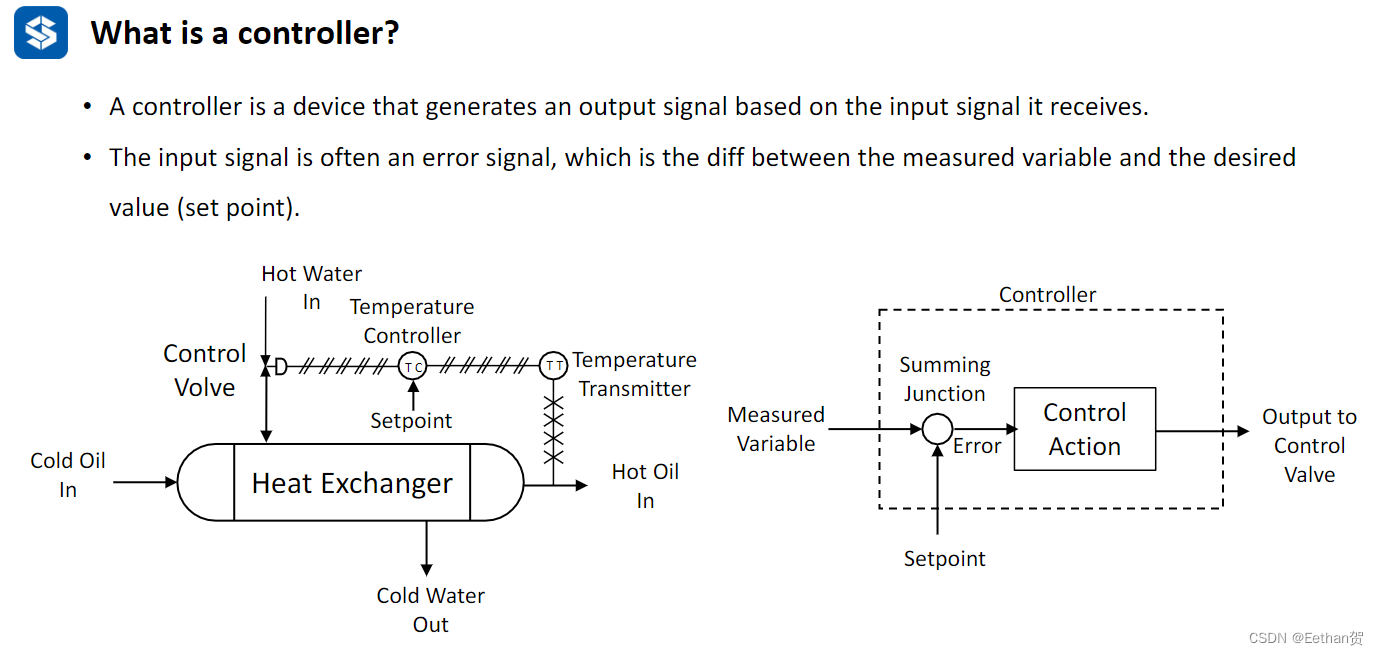
(1)控制器:
根据一个输入产生一个输出的装置。
其中,输入经常是一个 error。
(2)经典控制理论:
涉及拉氏变换和传递函数:
(1)拉氏变换:
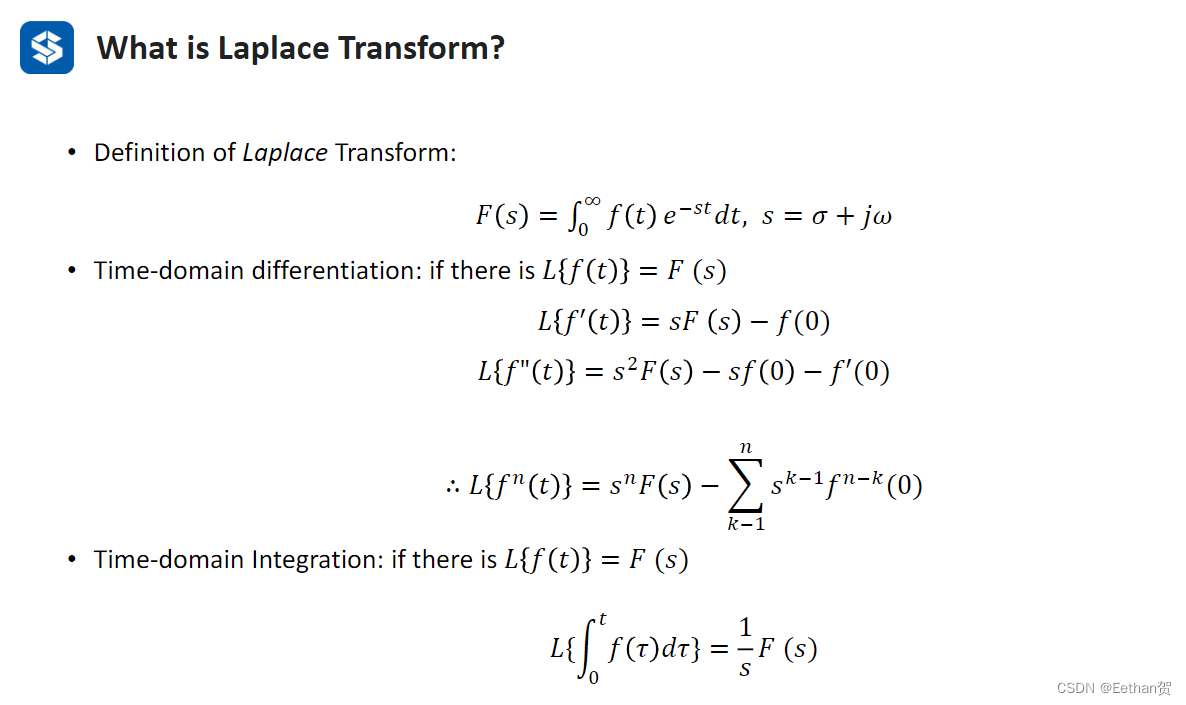
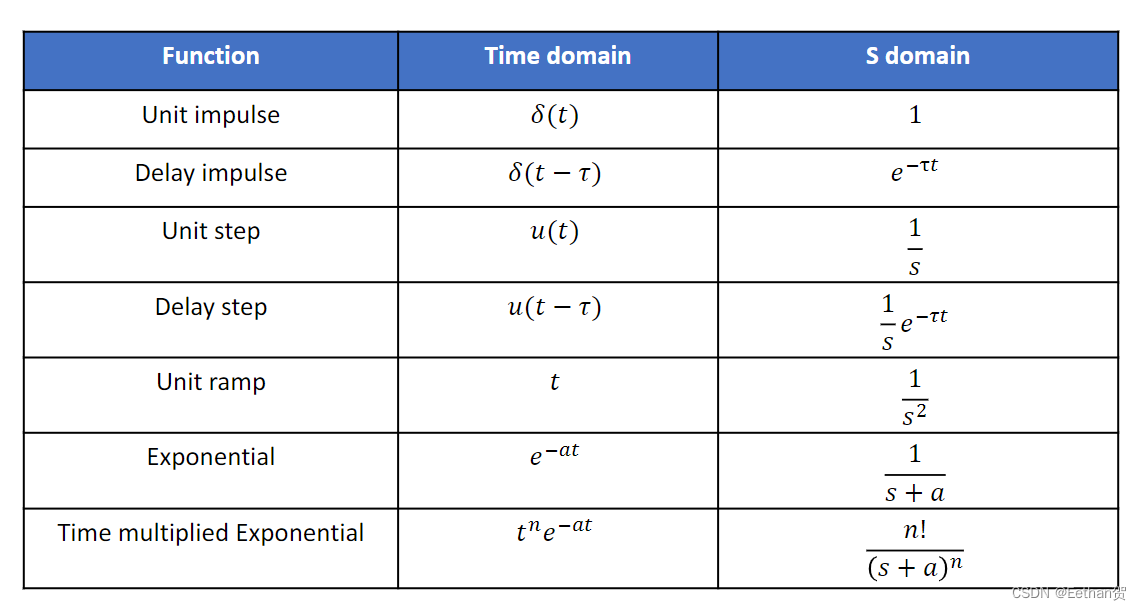
常用的拉氏变换:
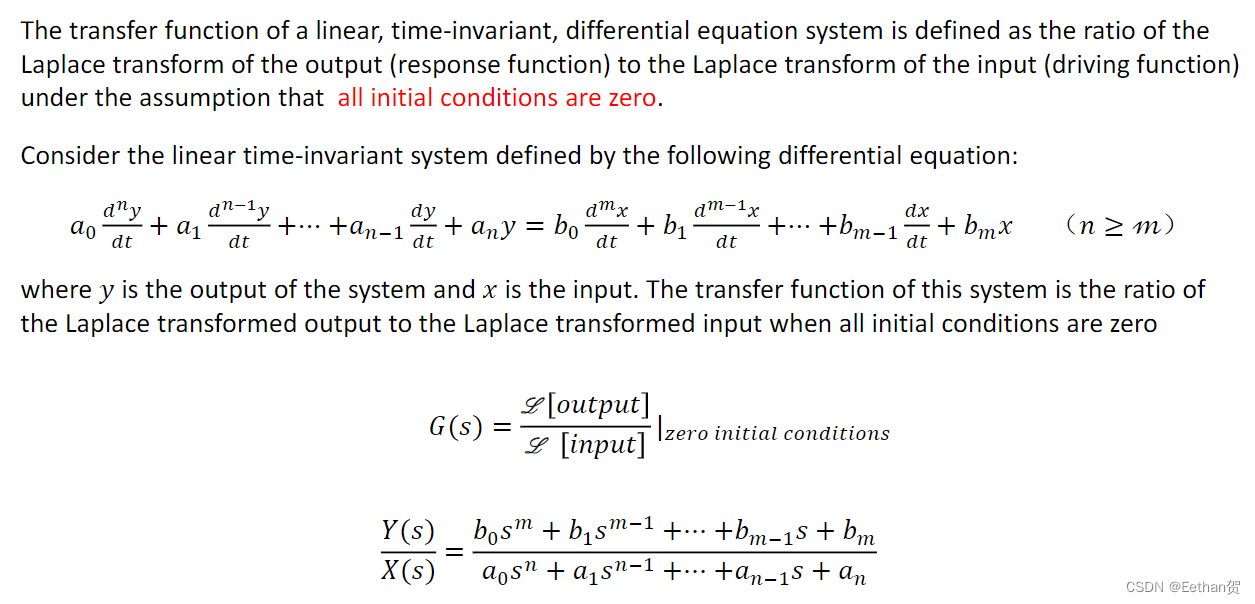
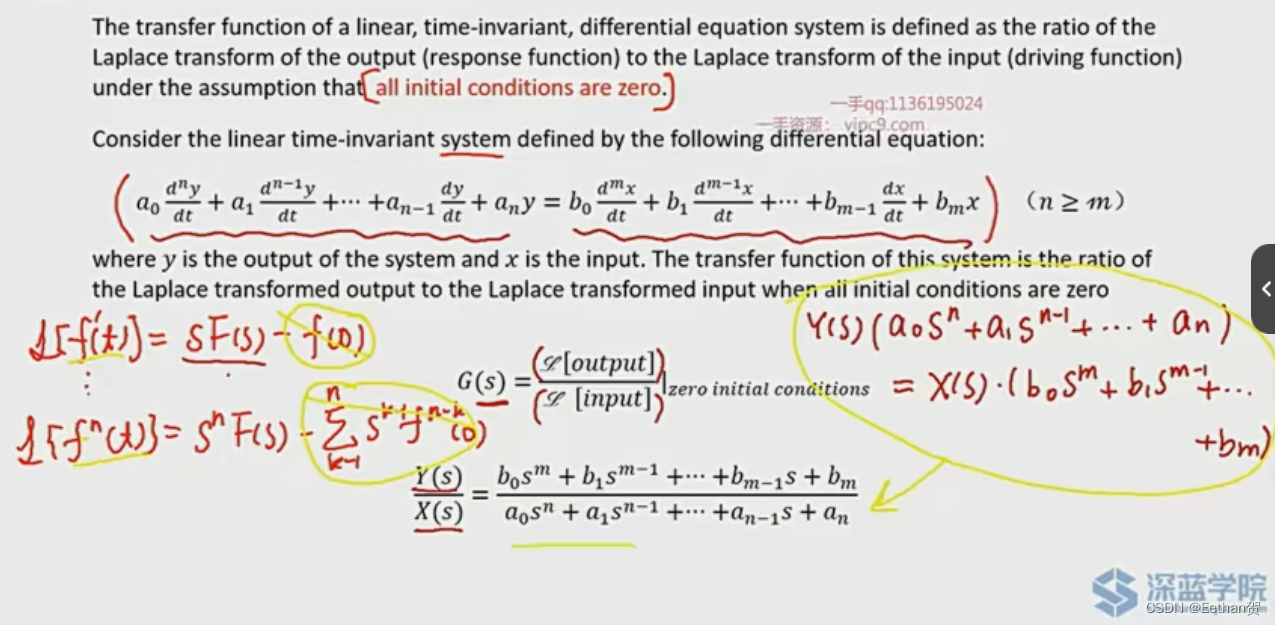
(2)传递函数:
把线性且时不变的输入输出关系通过拉氏变换的输出与输入的比值来表示的一个函数。
注意:在传递函数中,所有的初始状态都是0.
具体分析流程:
先分析常规的拉氏变换,公式如下书写,但由于初始状态为0,所以后两项均可以删除,则下面的function 可以改写成如下格式,从而得到传函G(s)。
如何构建传函?
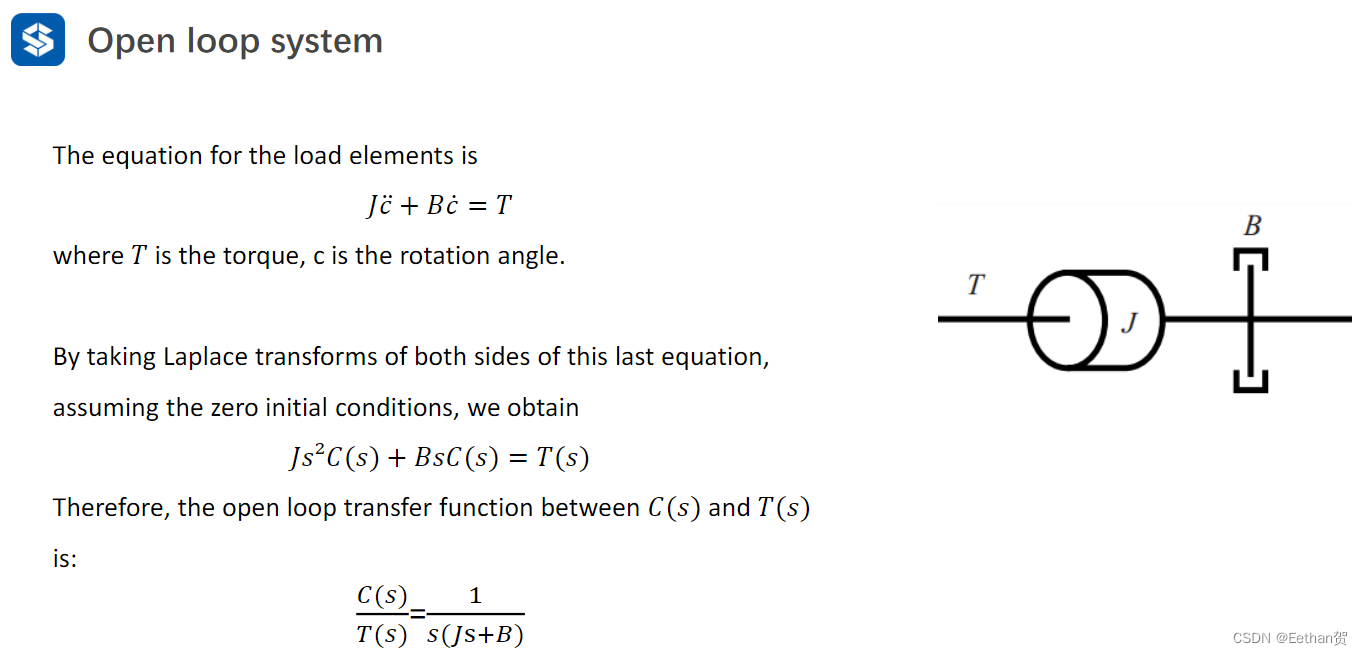
首先针对于一个简易的开环系统:电机系统
J是转动惯量,B是阻尼系数,T是力矩,c 是角度。
做拉氏变换,得到以下传函:
其次,针对于闭环系统:比例放大器
简而言之,就是根据输出改变输入。
推导过程如下:先对 e 和 c 进行分析,最后得到 r 和 e 的关系。
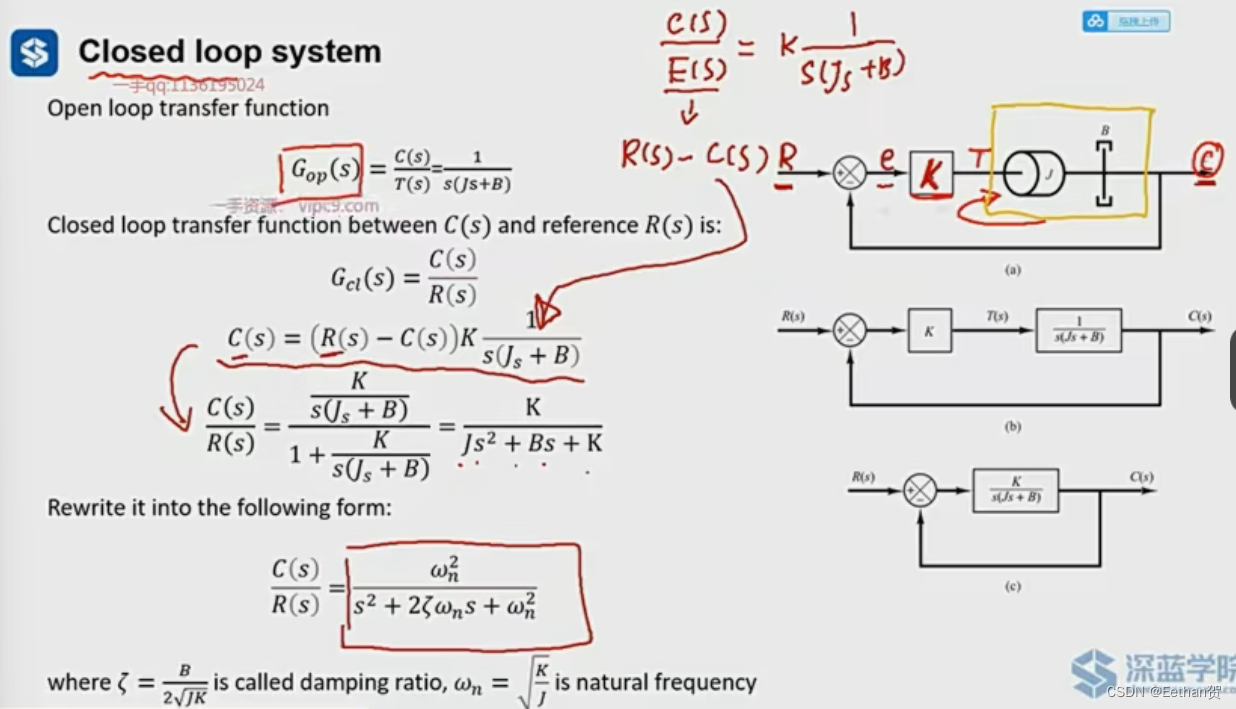
(注:上述公式,damping radio 是阻尼比,natural frequency 是固有频率。)
总之,引入一个增益 K,就可以将 open loop system 转变为 close loop system。
且K会影响整个系统变化,本来只能调节输入来改变系统响应,但现在可以通过放大缩小 K 来进行调节。
针对于二阶系统的阶跃响应:
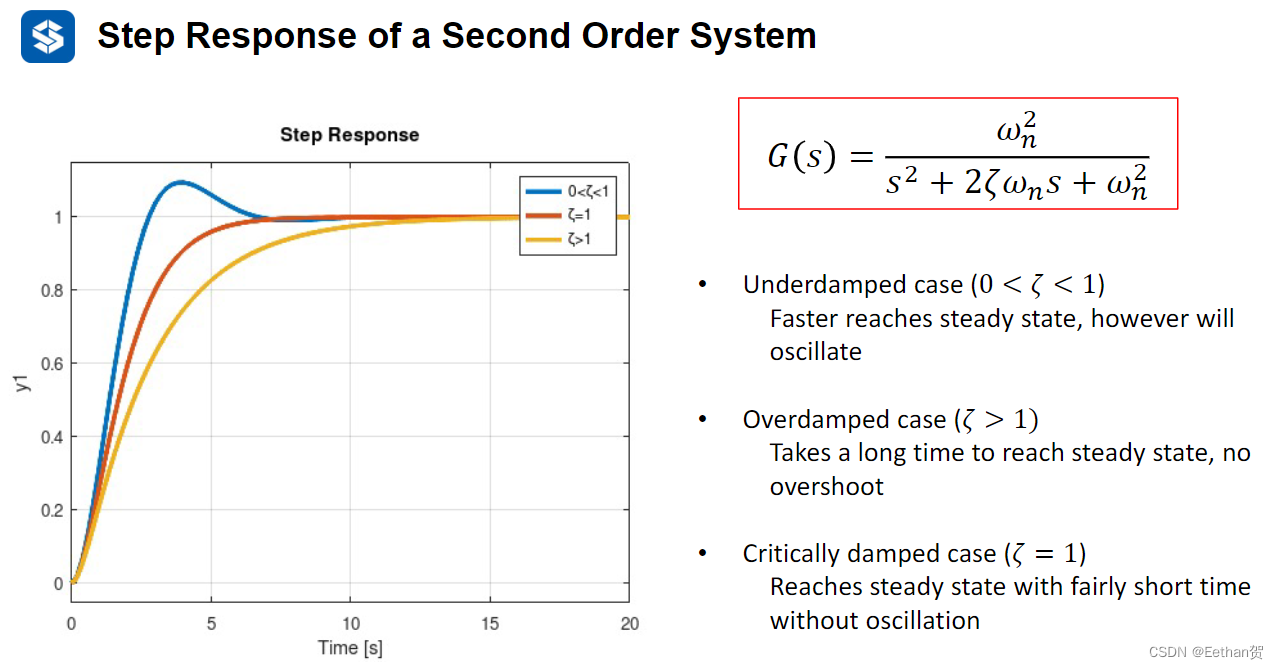
欠阻尼情况:快速到达稳态,但过程中会出现震荡。(阻尼比小于 1 的时候)
过阻尼情况:很长时间到达稳态,但完全不会出现overshoot,可以理解为不多不少吧。
临界阻尼情况:不会出现上述二者的弊端。
但实际情况时候,很难达到临界阻尼情况,所以恰当地选择前两者组合使用,是常用的方法。
伯德图:
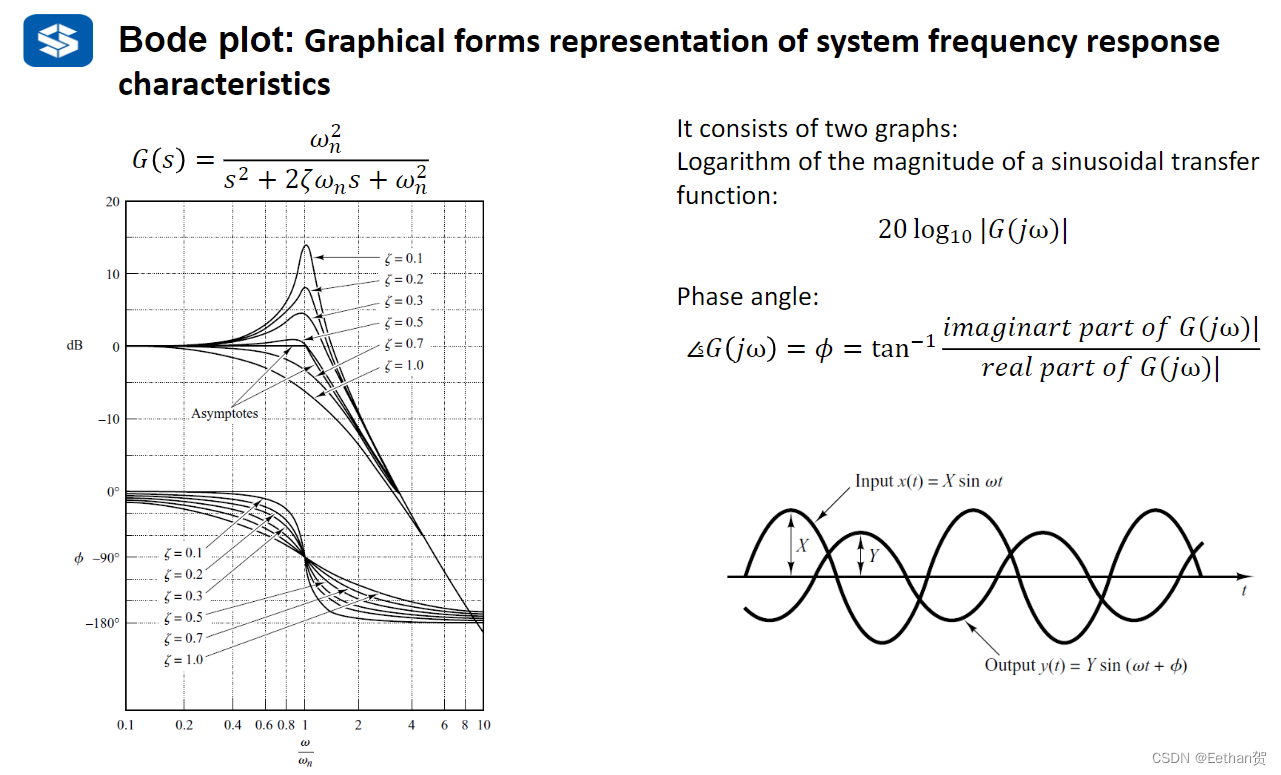
具体细节之后学习再补充。
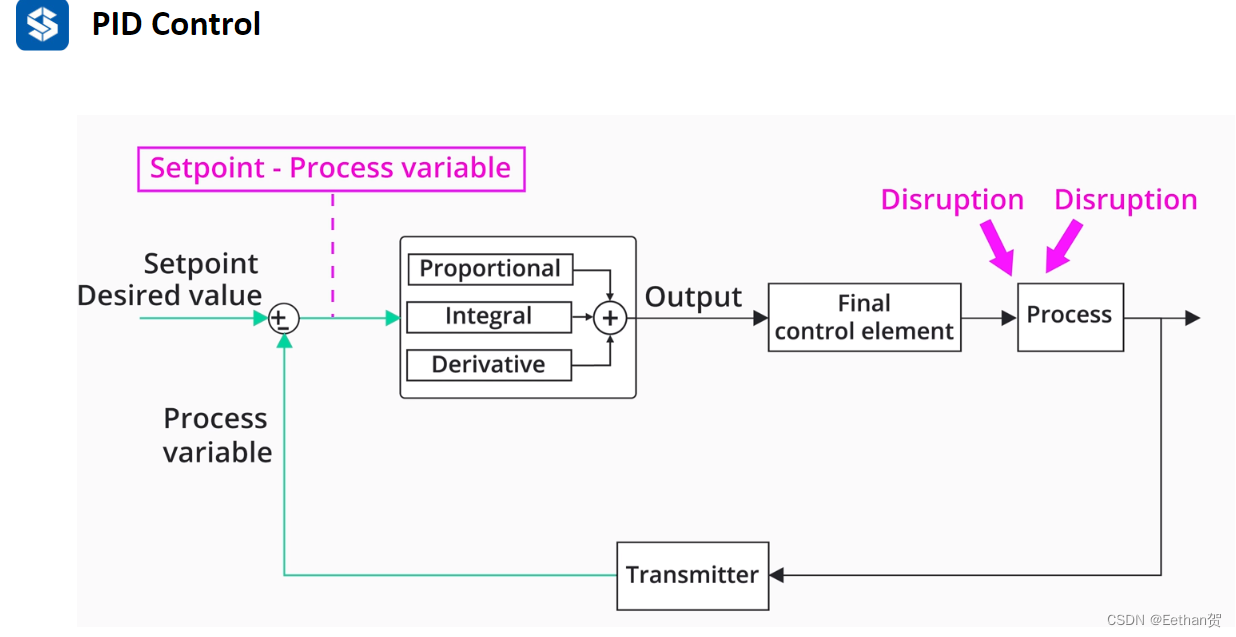
(3)PID controller:
传统反馈控制器的弊端:on/off controller 连续围绕着目标点持续震荡,比如如下的室温控制。
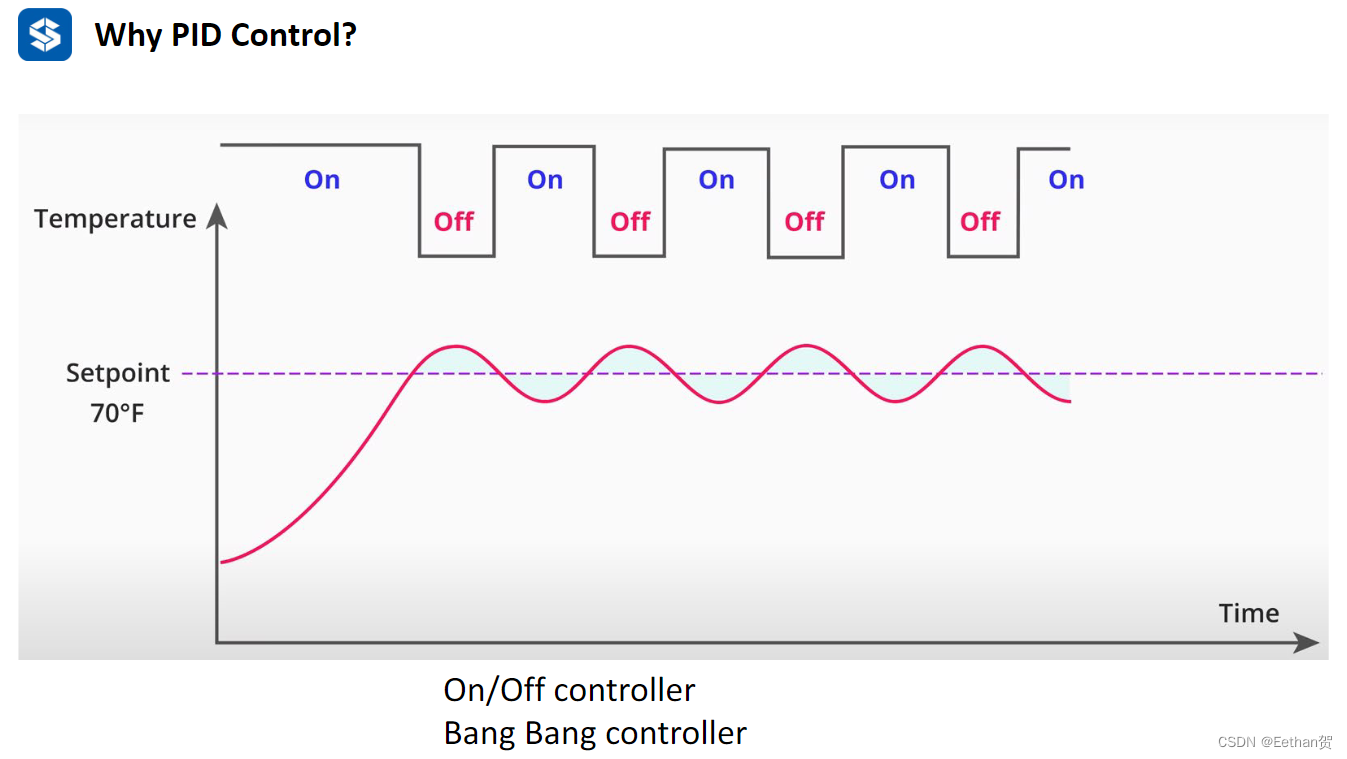
改进思想:当误差大的时候,快速调节,误差小的时候,降速调节。
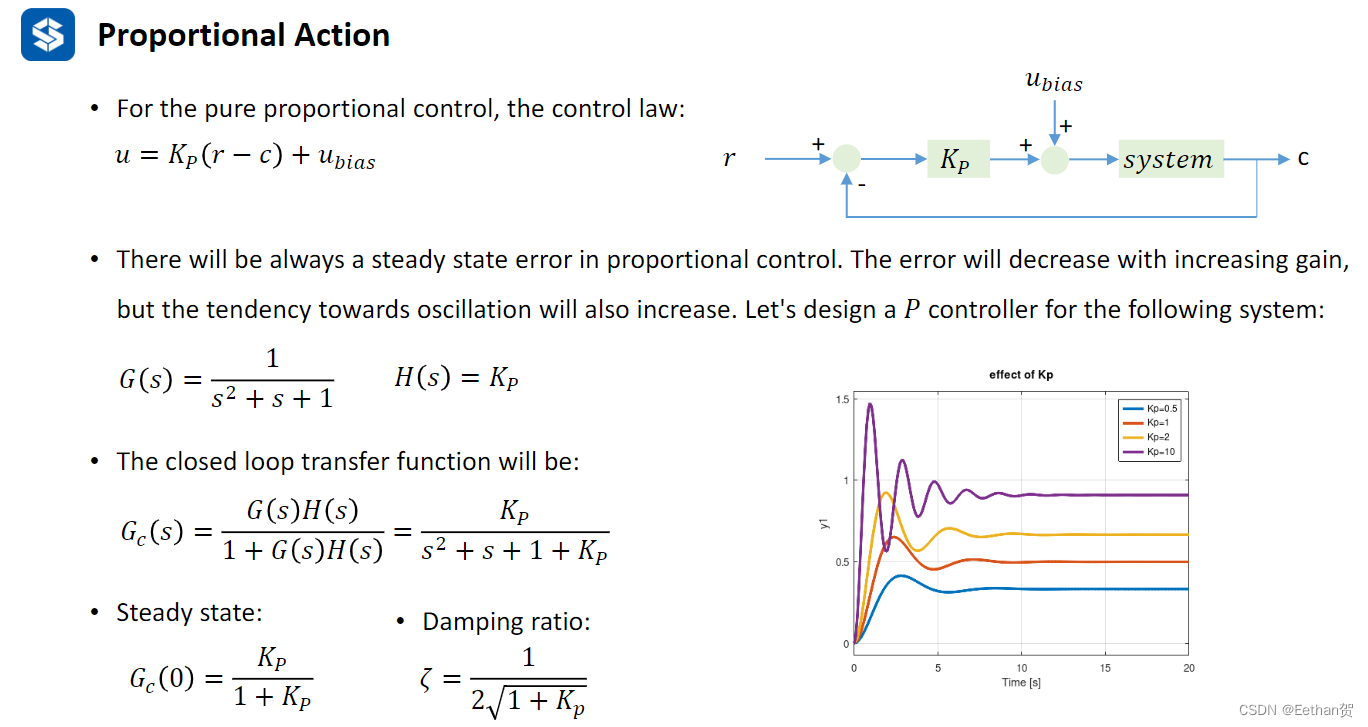
(1)PID原理:
针对于误差进行 p ,即误差比例放大缩小
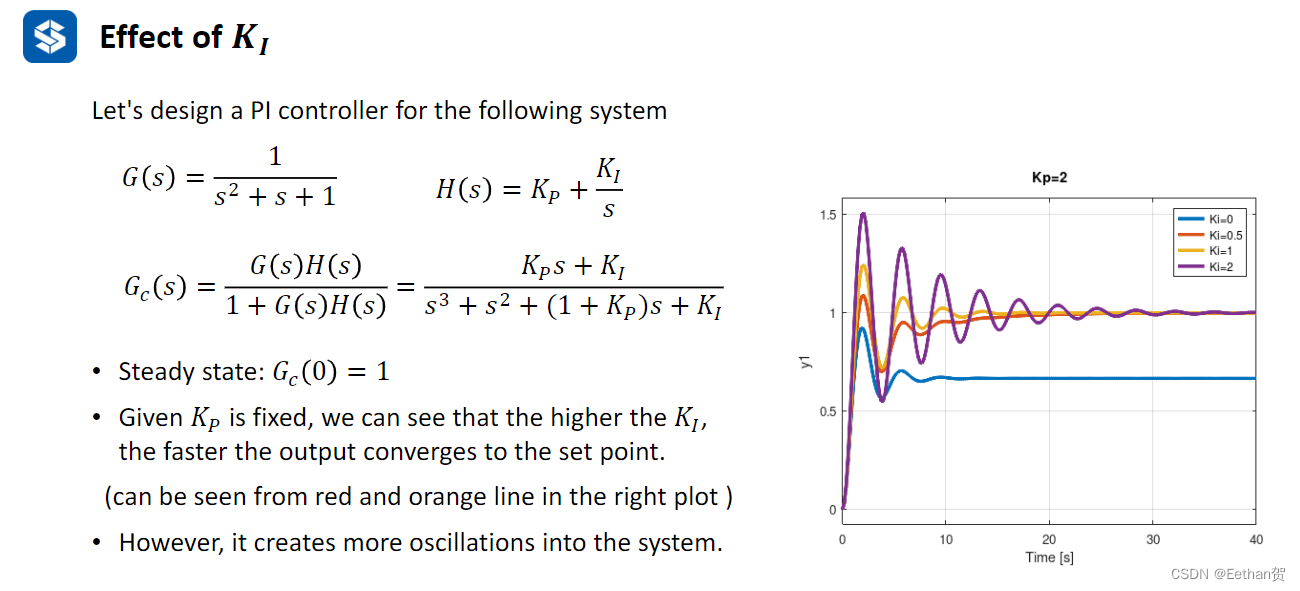
进行 i,即误差积分放大缩小
进行 D,即误差微分放大缩小
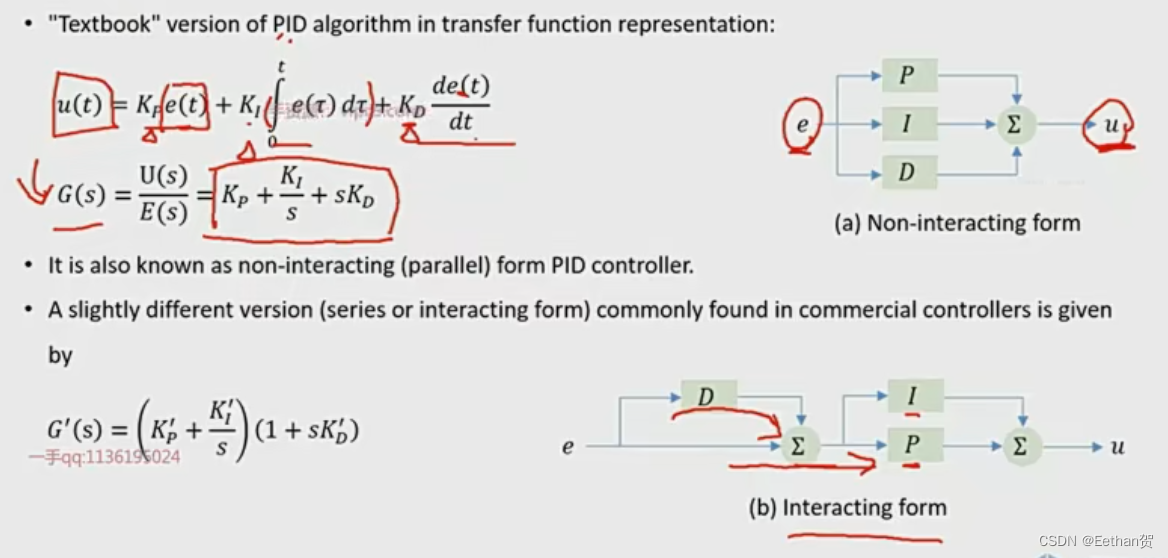
对应的公式和传函:
以下通过单独使用 Kp,对比加入积分项Ki ,发现积分项可以很好的解决稳态误差的问题。
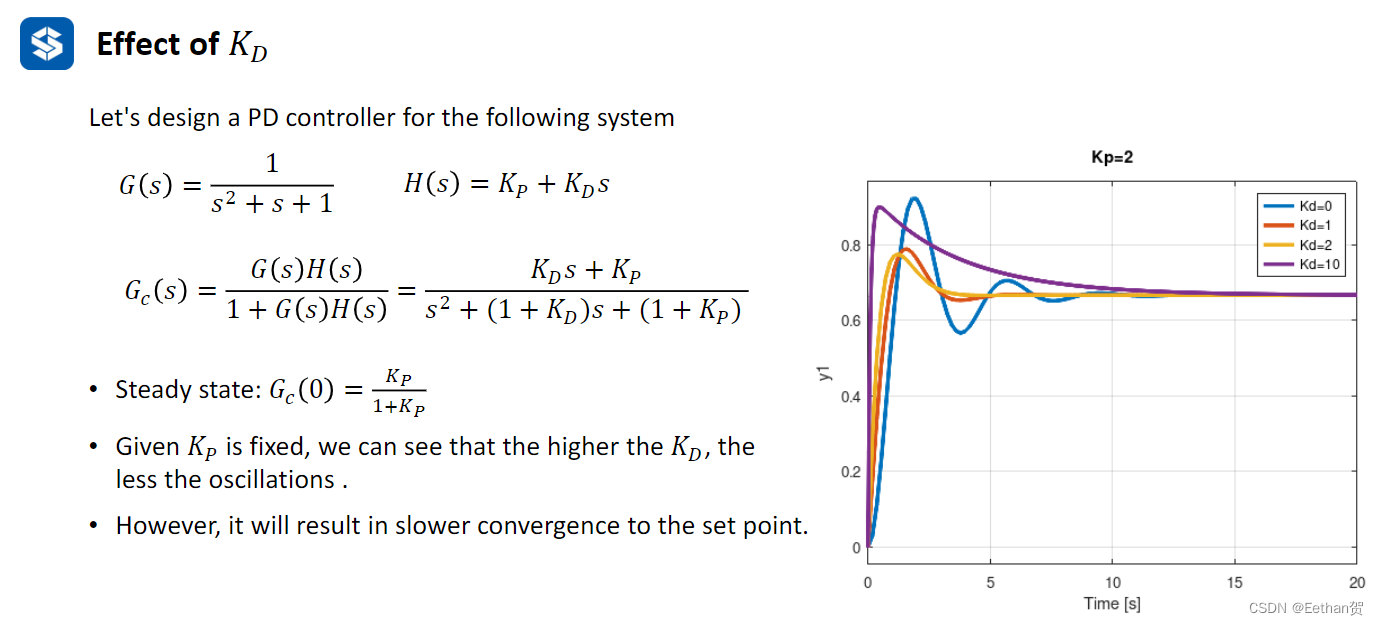
以下针对于PD,加入KD,可以减少震荡,但是过大无法减少超调。
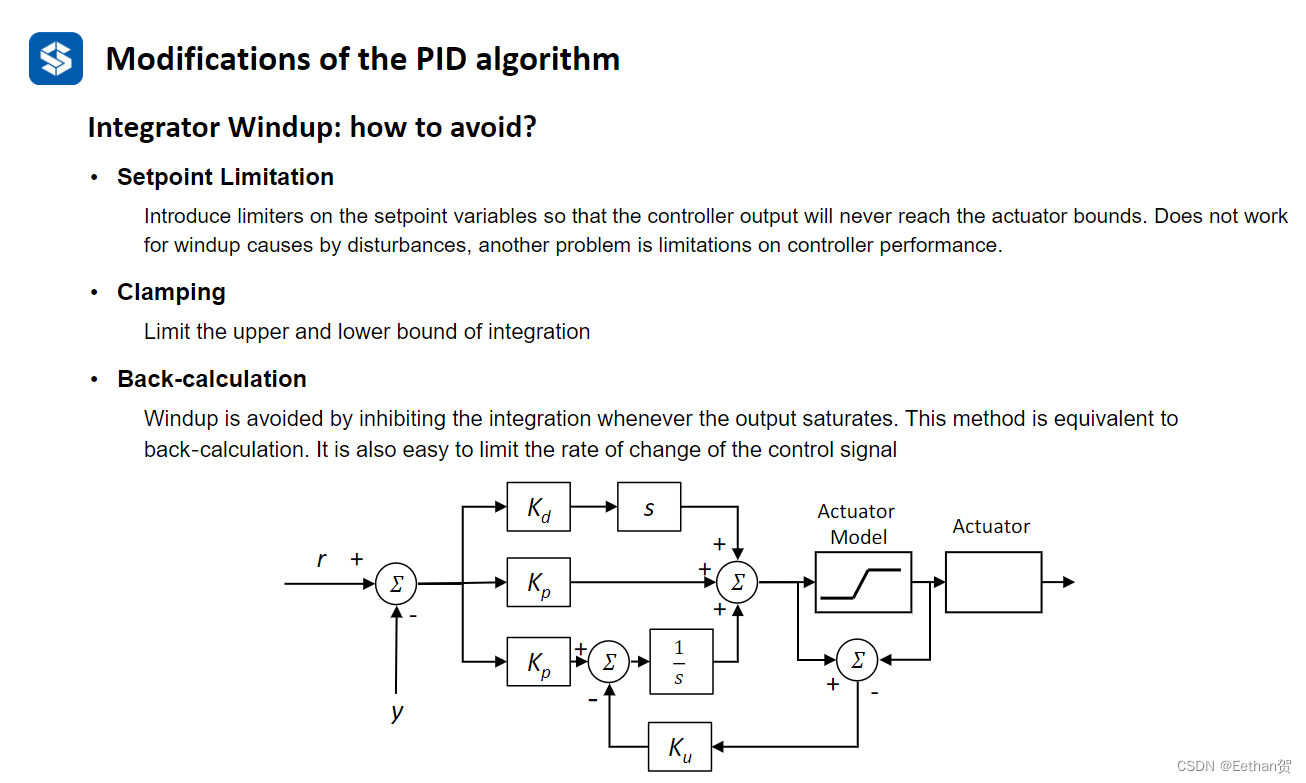
PID改善方案:
(2)PID整定方法:
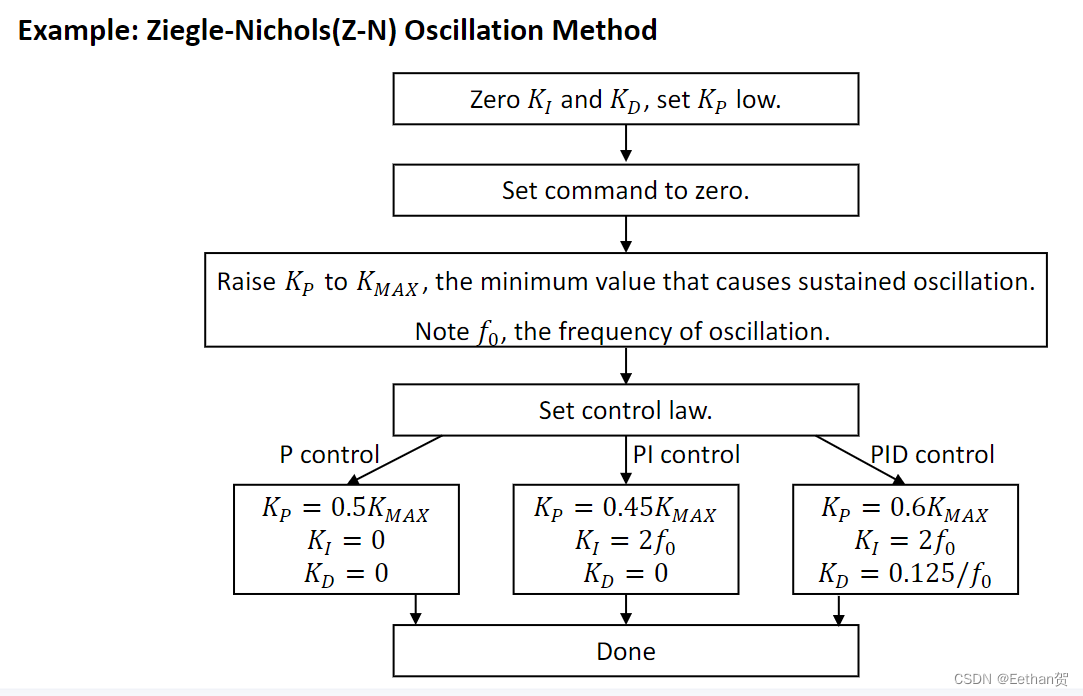
常用:Z-N震荡方法(适用于低频系统)
先初始化三个参数,使得控制器输入为 0,不断增加KP的值至Kmax(这是等幅振荡的时候),就得到了一个振荡频率,针对于以下P.PI.PID情况,设置以下参数。
总体而言,就是先调KP,再调KI。
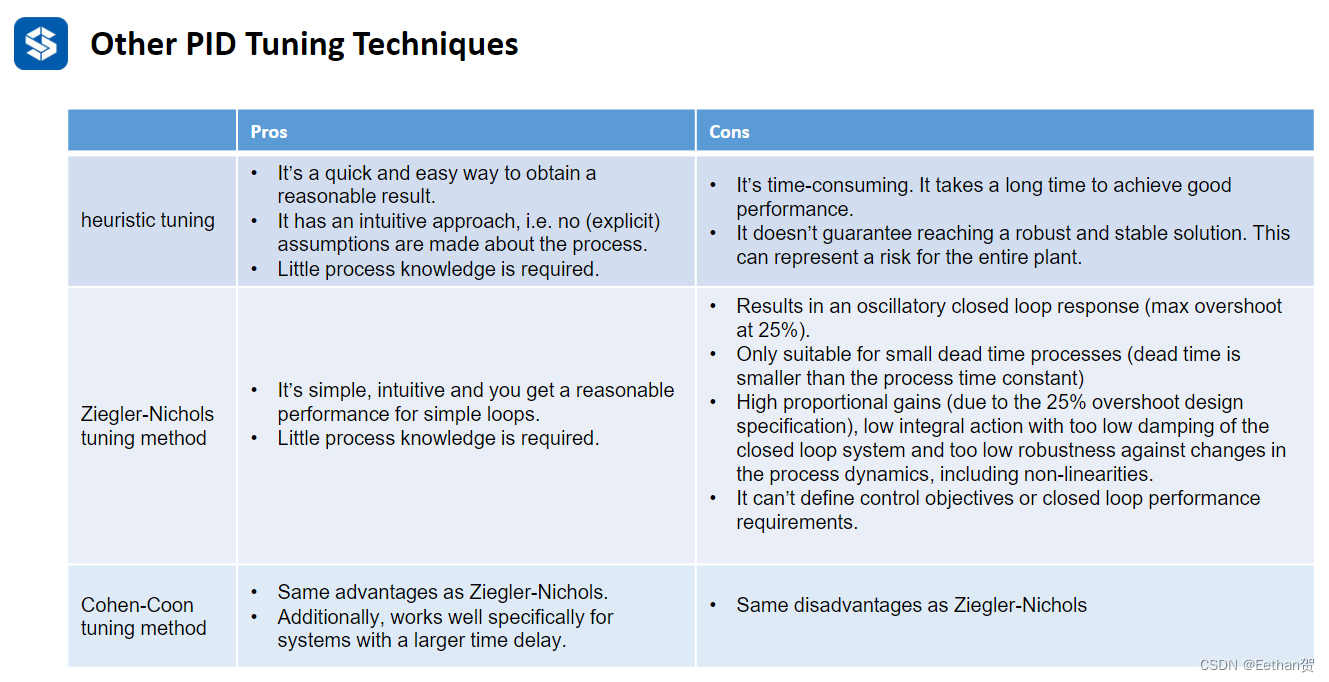
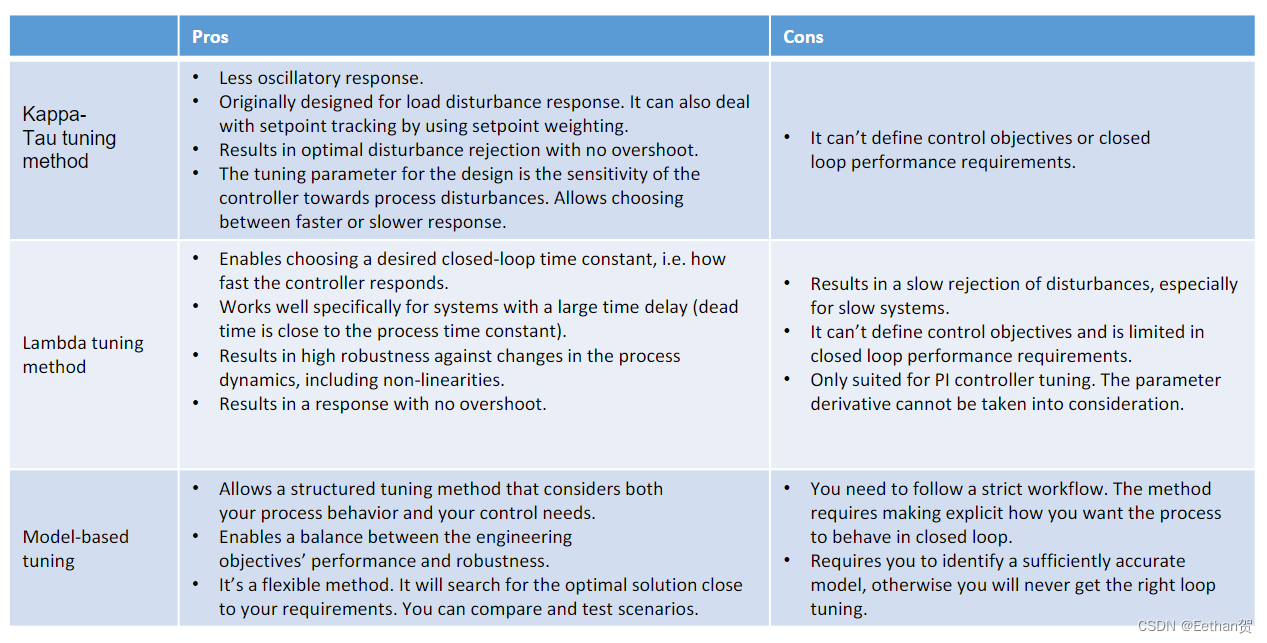
参数整定的三大方法:
 (4)运用:
(4)运用:
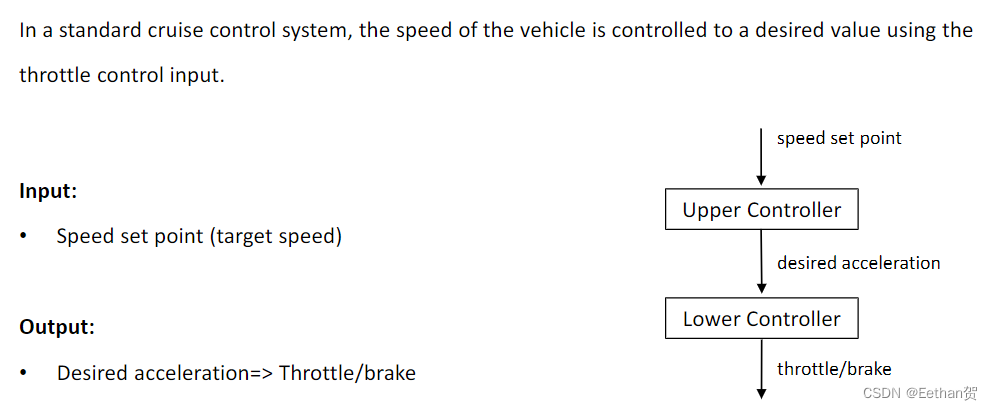
(1)巡航控制 cruise control
两层控制器:
输入速度设定点/目标速度,经过两层控制器,最终输出为期望加速度,进行节流或者制动。
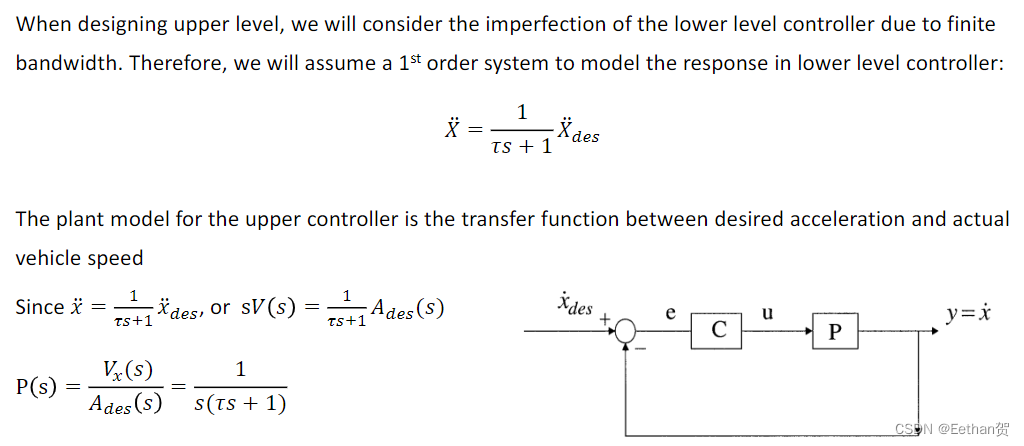
a. 上层控制器 upper level controller:
将速度 V 转变成目标加速度 ades。由于 V 是 X 的一阶导数,而 a 是 X 的二阶导数,则公式可以表述为如下形式。
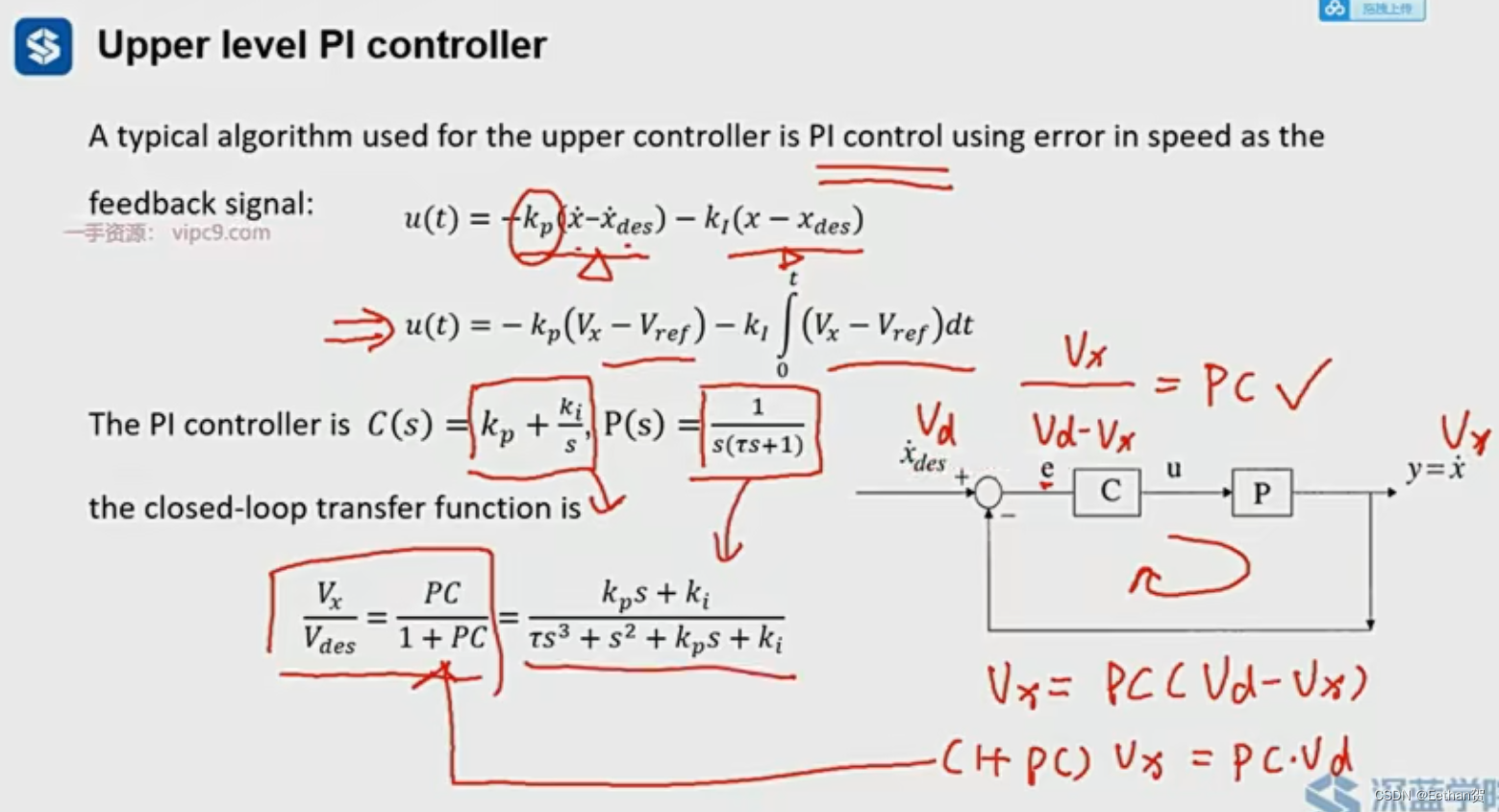
并采用 PI 控制进行控制:推导如下。
b. 下层控制 lower level controller:
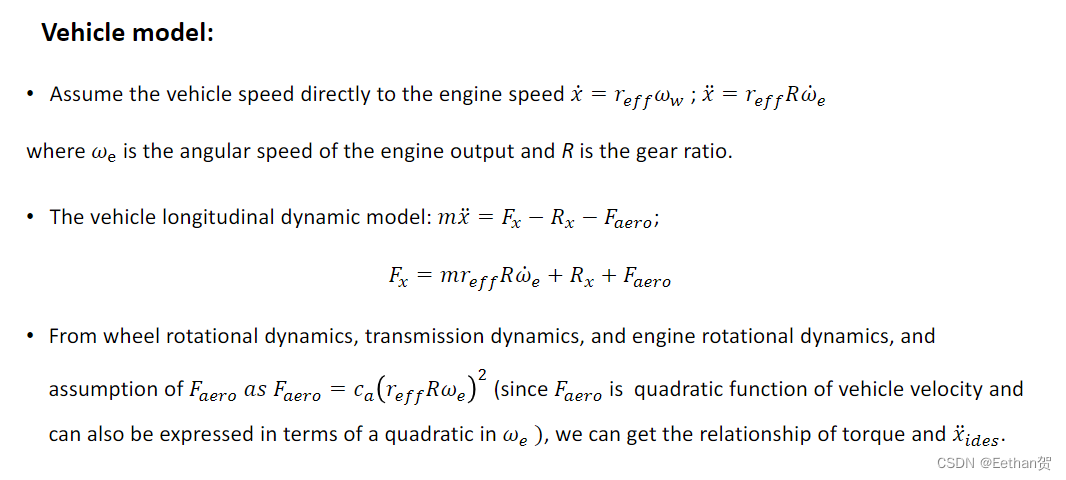
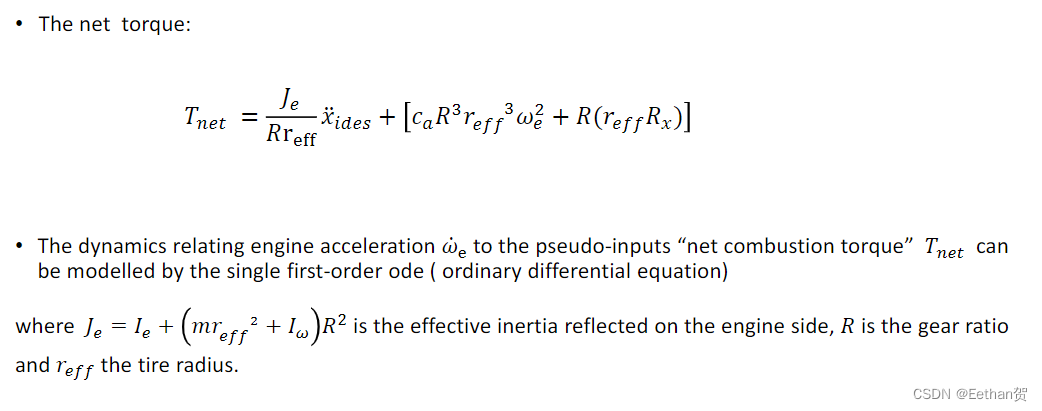
针对于车辆模型:
(2)ACC自适应巡航:
自适应巡航的特点:
加入 "跟车" 这一项,根据本车与前车的速度和距离,来调节本车的速度和距离。
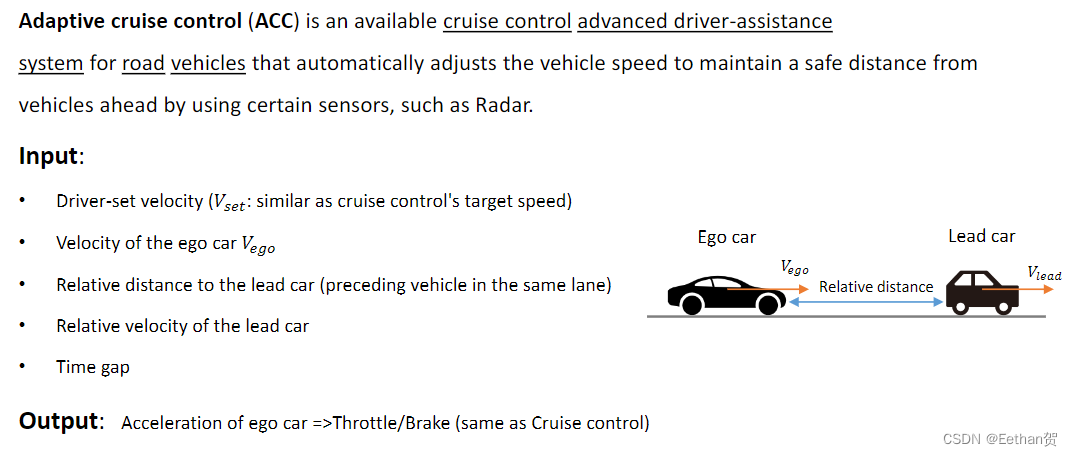
主要的 Input为:
(1)设定速度
(2)自身速度
(3)前车相对距离
(4)前车相对速度
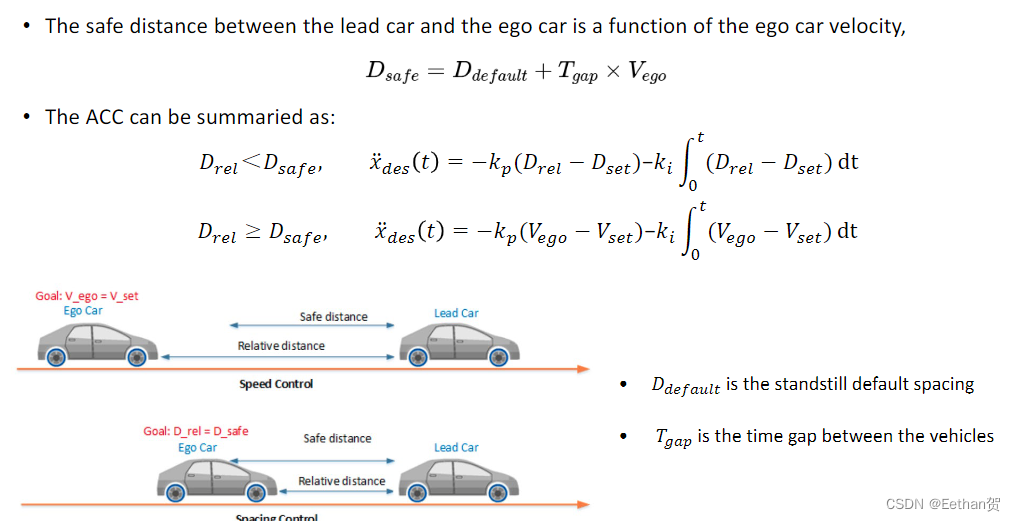
(5)time gap 时间间隔(重要)
输出 output:
(1)本车加速度
当本车与前车距离很近的时候,采用跟车控制,目标是保持车距;反之,采用定速控制,目标是行驶在一个理想速度下。
time gap :
为什么跟车模式采用 time gap ,而不是采用一个固定跟车车距呢?
纵向控制在跟车模式下满足的两点:
(1)跟车车辆的稳定性:
(2)车队的稳定性:看误差是否会传递而增加误差
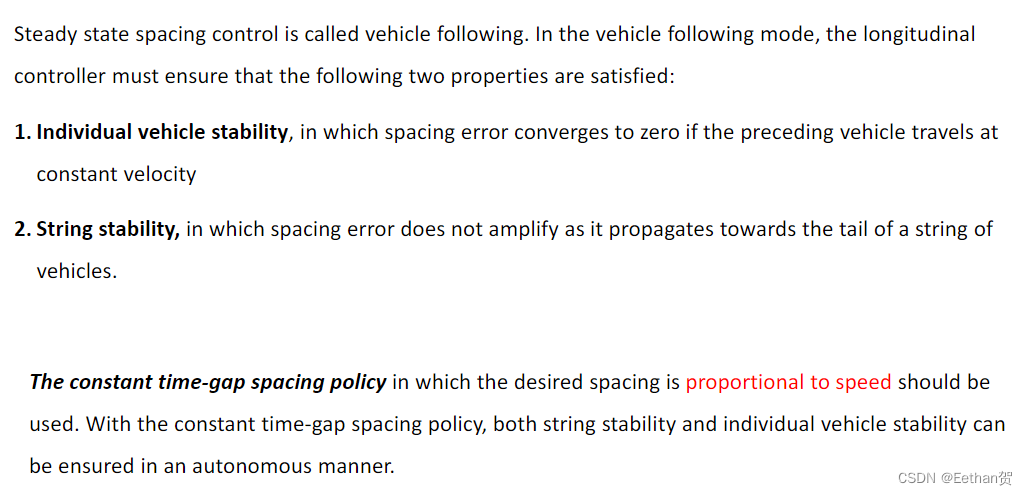
因此,安全跟车距离为:















 2552
2552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









