









目录
1.算法描述
路径规划是运动规划的主要研究内容之一。运动规划由路径规划和轨迹规划组成,连接起点位置和终点位置的序列点或曲线称之为路径,构成路径的策略称之为路径规划。路径规划在很多领域都具有广泛的应用。在高新科技领域的应用有:机器人的自主无碰行动;无人机的避障突防飞行;巡航导弹躲避雷达搜索、防反弹袭击、完成突防爆破任务等。在日常生活领域的应用有:GPS导航;基于GIS系统的道路规划;城市道路网规划导航等。在决策管理领域的应用有:物流管理中的车辆问题(VRP)及类似的资源管理资源配置问题。通信技术领域的路由问题等。凡是可拓扑为点线网络的规划问题基本上都可以采用路径规划的方法解决。
烟花算法 (Fireworks Algorithm),缩写为 FWA,是受到夜空中烟花爆炸的启发而提出的一种群体智能算法。
自从烟花算法的开创性论文由谭营教授等人于2010年发表之后 ,业界对烟花算法的研究逐步深入和铺开。通过对原始烟花算法的细致、深入的分析,针对原始烟花算法(FWA)的不足,提出了大量的改进方法,并据此发展了各种改进算法,以及与其他方法的混合方法,大大提高的原始烟花算法的性能,同时研究了烟花算法在求解不同类型优化问题的能力,还有大量的研究人员进行了烟花算法的应用研究,给出了一些典型的成功应用案例。
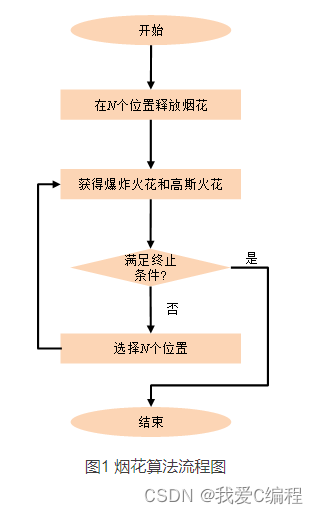
烟花算法开始迭代,依次利用爆炸算子、变异算子、映射规则和选择策略,直到达到终止条件,即满足问题的精度要求或者达到最大函数评估次数。烟花算法的实现包括如下的几个步骤:
1)在特定的解空间中随机产生一些烟花,每一个烟花代表解空间的一个解。
2)根据适应度函数计算每一个烟花的适应度值,并根据适应度值产生火花。火花的个数是基于免疫学中的免疫浓度的思想来计算的,即适应度值越好的烟花产生火花的数目越多。
3)根据现实中的烟花属性并结合搜索问题的实际情况,在烟花的辐射空间内产生火花。(某个烟花的爆炸幅度的大小由该烟花在函数上的适应度值决定,适应度值越大,爆炸幅度越大,反之亦然)。每一个火花代表解空间中的一个解。为了保证种群的多样性,需要对烟花进行适当变异,如高斯变异。
4)计算种群的最优解,判定是否满足要求,如果满足则停止搜索,没有满足则继续迭代。迭代的初始值为此次循环得到的最好的解和选择的其他的解。
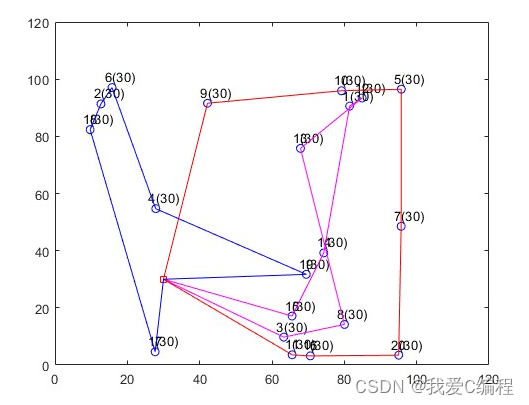
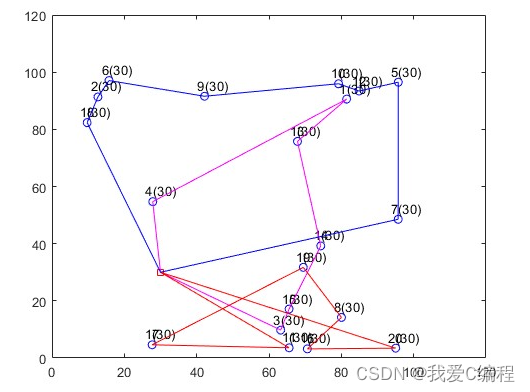
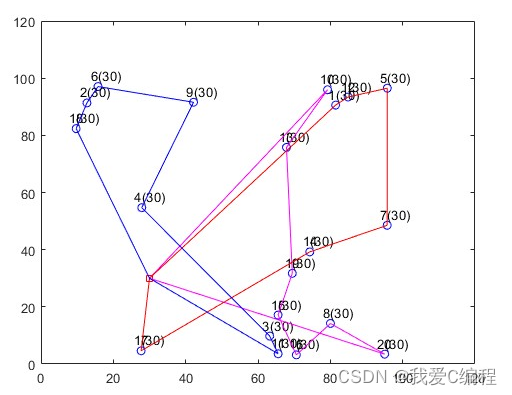
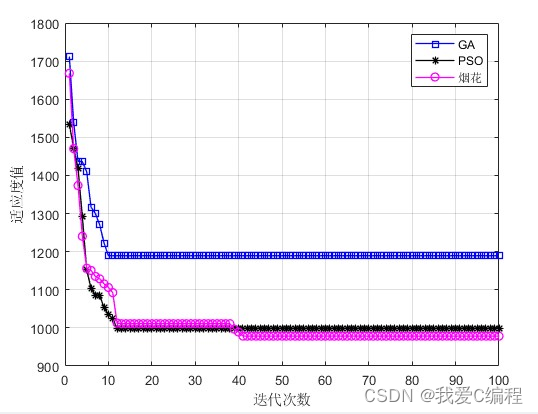
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
%最大迭代次数
Iteration = 100;
%种群数目
Pops = 1000;
c1 = 2.5; %学习因子1
c2 = 2.5; %学习因子2
w = 0.9; %惯性权重
%初始化路线存储变量
Routes = func_routeList(Dim);
Lens = length(Routes);
Lens2 = 30;
Tabu = zeros(Lens,1);
%初始化
Sets.Posxy = [];
Sets.fitness = [];
Sets.pops = [];
pop = repmat(Sets,Pops,1);
BestSol.fitness = inf;
%初始化种群
for i=1:Pops
pop(i).Posxy = randperm(Dim);
[pop(i).fitness,pop(i).pops] = Objs(pop(i).Posxy);
y(i).Posxy = pop(i).Posxy;
newpop(i).Posxy = pop(i).Posxy;
end
Bestfit = zeros(Iteration,1);
NewSets = Sets;
pg = pop(1).Posxy;
for it=1:Iteration
it
for i=1:Pops
if it==1
v{i} = c1*rand*(y(i).Posxy-newpop(i).Posxy)+c2*rand*(pg-newpop(i).Posxy);
else
v{i} = w*v{i}+c1*rand*(y(i).Posxy-newpop(i).Posxy)+c2*rand*(pg-newpop(i).Posxy);
end
end
for i=1:Pops
tmps = newpop(i).Posxy+v{i};
[VV,II] = sort(tmps);
newpop(i).Posxy = II;
tmps = newpop(i).Posxy;
for ij = 1:length(tmps)
if tmps(ij)<=1;
tmps(ij)=1;
end
end
newpop(i).Posxy = tmps;
end
%更新目标
for i = 1:Pops
[newpop(i).fitness,newpop(i).pops] = Objs(newpop(i).Posxy);
if pop(i).fitness<BestSol.fitness
BestSol=pop(i);
end
y(i).Posxy = newpop(i).Posxy;
end
%路线处理
pop = [pop;newpop'];
[Vmax,Idx] = sort([pop.fitness]);
pop = pop(Idx(1:Pops));
pops = pop(1);
bestnewsol = pop(1);
for i=1:Lens
if Tabu(i)==0
newsol.Posxy = func_variation2(pops.Posxy ,Routes{i});
[newsol.fitness,newsol.pops] = Objs(newsol.Posxy);
newsol.ActionIndex = i ;
if newsol.fitness<=bestnewsol.fitness
bestnewsol = newsol;
end
end
end
if pops.fitness == bestnewsol.fitness
pops = bestnewsol;
pops.ActionIndex = [] ;
else
pops = bestnewsol ;
end
for i=1:Lens
if i== pops.ActionIndex
Tabu(i)=Lens2;
else
Tabu(i)=max(Tabu(i)-1,0);
end
end
pop(1).Posxy = pops.Posxy ;
pop(1).fitness = pops.fitness;
pop(1).pops = pops.pops;
if pop(1).fitness <= BestSol.fitness
BestSol=pop(1);
end
Bestfit(it)= BestSol.fitness;
pg = pop(1).Posxy;
end
bestN = BestSol.pops.Infor_Route.seqs;
for ij = 1:Sysm.NCar
seqs2{ij} = BestSol.pops.Infor_Route(ij).seqs;
LENS(ij) = BestSol.pops.Infor_Route(ij).Rlen;
end
02_105m4.完整MATLAB
V
















 9013
9013











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











