







目录
1.算法描述
载波同步是相干解调的基础,不管对于模拟通信还是数字通信来说,只要是相干解调,接收端都必须提供同频同相的载波。当然,若采用基带传输,此时便没有载波同步的问题,因为没有频带调制,即没有乘以载波进行频谱搬移的过程。
位同步,也叫符号同步、定时同步、码元同步,只有数字通信才需要,数字通信中不管是基带传输还是频带传输都需要。这是因为数字通信中,是用波形中的几个采样点去代替一个符号,在接收端只需要对这些采样点中的一个进行判决,便可以恢复出这个符号。
实际通信中,由于信道的传输时延,接收两端的时钟偏移,接收端无法找到符号的最佳时刻来对其进行采样判决,这便使得接收端恢复出的数据与发送端的数据有误差。接收端若想在最佳采样时刻恢复发送端的数据,便要使得接收时钟与发送时钟同步,因此接收端要采取措施来调整接收端的采样时钟,这个同步的过程便定义为位同步。
这里,我们分析了通信中的4进制相移键控QPSK调制解调算法,并使用具有多种信号处理IP核且开发灵活的现场可编程逻辑门阵列(Field-Programmable Gate Array:FPGA)对该算法进行了硬件实现。对BPSK调制解调算法中的关键技术数控振荡器(Numerically controlled oscillator: NCO)、成型滤波器、载波同步与定时同步的基本原理进行了详细的分析。随后,基于通信系统的设计要求,分别选择Costas环和Gardner环用于载波和码元同步,并利用Matlab软件对同步环路的参数及功能进行了仿真验证。在Matlab仿真验证成功后,使用Verilog语言对BPSK调制解调算法进行了硬件描述,并对该算法进行了功能仿真。仿真结果证明了 BPSK调制解调算法在FPGA中的正确实现。最后对水声通信试验平台中的上位机进行了简单设计,并完成了与FPGA的相互数据通信。为了进一步验证所编写的FPGA算法的正确性能,进行了相应的水池试验验证。结果表明,由于Costas环能够正确补偿信号传输过程中所产生的频偏,Gardner环也可以补偿信号在传输过程中所产生的定时偏差,因此当收发通信距离较短、信道的多途影响较小时,通过对估计的码元符号和原始码元符号进行对比,计算出环路在同步后的数据误码率为0,星座图分布良好,验证了基于FPGA的BPSK调制解调算法的正确实现。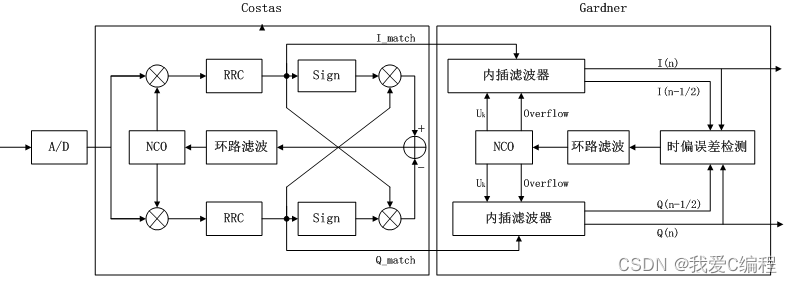
Costas环(Costas Loop)用在抑制载波调制信号(比如双边带抑制载波调制)和相位调制信号(BPSK、QPSK)的相干解调中的载波恢复(carrier frequency recovery)上。由通用电气公司的John P. Costas 在1950s发明。它的发明被描述为对现代数字通信产生了深远的影响。Costas环的主要应用是在无线通信接收机中。与基于PLL的检波器相比,它的优势在于,在相位差比较小的情况下,Costas环输出的误差电压为 sin(2(θi−θf)) ,而基于PLL的检波器输出的误差电压为 sin(θi−θf) ,这不仅使灵敏度提高了一倍,而且使Costas环路特别适合跟踪载波的多普勒频移,特别是在OFDM和GPS接收机中。
Gardner定时误差算法通常用在BPSK、QPSK信号,通过改进可以应用在QAM等多进制基带信号中。Gardner定时误差算法,该算法的一个特点是每个符号只需要使用两个采样点,一个是strobe点,即最佳观察点,另外一个是midstrobe点,即两个观察点之间的采样点。Gardener环中的数控振荡器与锁相环路中的NCO功能完全不同,这里的NCO作用是产生时钟,即确定内插基点mk,同时完成分数间隔uk的计算,以提供给内插器进行内插。
位同步环路中的数控振荡器(NCO)是一个相位递减器,它的差分方程为:
η(m+1)=[η(m)-ω(m)]mod1
式中,η(m)是第m个工作时钟NCO寄存器的内容,ω(m)为NCO的控制字,两者都是正小数。NCO的工作周期是T s(采样周期),内插器的周期为T i,ω(m)由环路滤波器进行调节,使NCO在最佳采样时刻溢出。当环路达到平衡时,ω(m)近似是个常数,此时平均每隔1/ω(m)个采样周期,NCO就溢出一次,所以

gardner环内部结构如下所示:

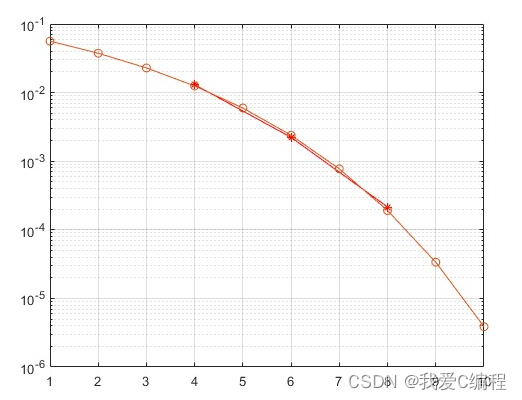
2.matlab算法仿真效果
matlab2022a仿真结果如下:


3.MATLAB核心程序
mul = 2;%按块进入根升余弦滤波器
for i = 1 + mul:carlen - mul
%为加快收敛,前端使用较大的系数以快速震荡
if i < 1000
C1 = 0.007;
C2 = C1 * 0.007;
else
C1 = 0.0005;
C2 = C1 * 0.001;
end
%频率锁相环
for k = 1 : nsamp
I_NCO = cos(wc_nco/Freq_Sample*((i-1-mul)*nsamp+1 : (i-1+mul)*nsamp+nsamp)+mod(NCO_Phase,2*pi));%NCO产生的I路输入信息数据
Q_NCO = - sin(wc_nco/Freq_Sample*((i-1-mul)*nsamp+1 : (i-1+mul)*nsamp+nsamp)+mod(NCO_Phase,2*pi));%NCO产生的Q路输入信息数据
I_RECE=rece((i-1-mul)*nsamp+1 : (i-1+mul)*nsamp+nsamp).*I_NCO; %I路输入信息数据
Q_RECE=rece((i-1-mul)*nsamp+1 : (i-1+mul)*nsamp+nsamp).*Q_NCO; %Q路输入信息数据
%根升余弦滤波
I_RRC_S = RRCrece(I_RECE,Freq_Data,nsamp,alpha,delay);%I路输入信息数据经过根升余弦匹配滤波
Q_RRC_S = RRCrece(Q_RECE,Freq_Data,nsamp,alpha,delay);%Q路输入信息数据经过根升余弦匹配滤波
I_PLL=I_RRC_S(delay*nsamp-nsamp/2+mul*nsamp+2+k); %鉴相器的I路输入信息数据
Q_PLL=Q_RRC_S(delay*nsamp-nsamp/2+mul*nsamp+2+k); %鉴相器的Q路输入信息数据
dataoutI((i-1)*nsamp+k) = I_PLL;%用来查看鉴相器的I路输入信息数据
dataoutQ((i-1)*nsamp+k) = Q_PLL;
%鉴相器处理
Discriminator_Out = (sign(I_PLL)*Q_PLL-sign(Q_PLL)*I_PLL)/sqrt(2);
dd((i-1)*nsamp+k) = Discriminator_Out;%用来查看鉴相器的输出
%环路滤波器处理
PLL_Phase_Part((i-1)*nsamp+k) = Discriminator_Out * C1;
Freq_Control((i-1)*nsamp+k) = PLL_Phase_Part((i-1)*nsamp+k)+PLL_Freq_Part((i-1)*nsamp+k-1);
PLL_Freq_Part((i-1)*nsamp+k) = Discriminator_Out * C2 + PLL_Freq_Part((i-1)*nsamp+k-1);
NCO_Phase = NCO_Phase + Freq_Control((i-1)*nsamp+k); %生成的相位
WC_frame((i-1)*nsamp+k) = FC_NCO + PLL_Freq_Part((i-1)*nsamp+k) * Freq_Sample;
%=========================================================
NCO_Phase_((i-1)*nsamp+k)=mod(NCO_Phase,2*pi);
end
end
A784.完整MATLAB
V
V















 3500
3500











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











