






 本文详细解读了带相机PLC1200的SCL语言与梯形图混编的立体库机器人码垛机伺服视觉程序,涉及西门子PLC1215、TP700触摸屏、基恩士相机视觉定位、ABB机器人、码垛机及G120变频器的ModbusTCP和Profinet通讯,提供全面的开发技术和注释。
本文详细解读了带相机PLC1200的SCL语言与梯形图混编的立体库机器人码垛机伺服视觉程序,涉及西门子PLC1215、TP700触摸屏、基恩士相机视觉定位、ABB机器人、码垛机及G120变频器的ModbusTCP和Profinet通讯,提供全面的开发技术和注释。
带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序
包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序
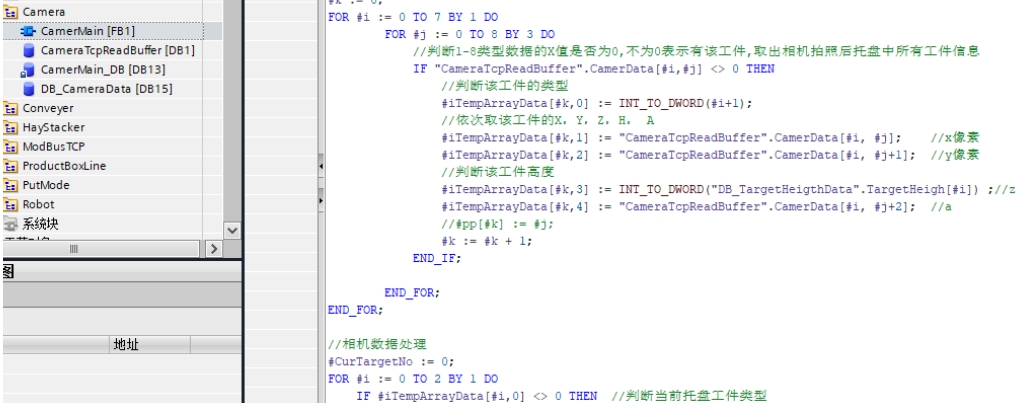
PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言)
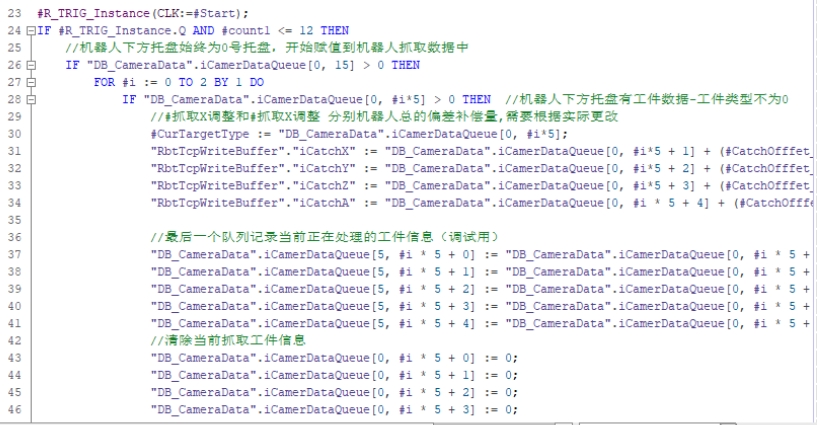
PLC和ABB机器人Modbus TCP通讯(SCL语言)
PLC和码垛机Modbus TCP通讯(SCL语言)
PLC和4台G120变频器Profinet通讯
1个伺服轴
SCL语言和梯形图混编,经典程序,知识点丰富,注释全。
ID:938630177690446
经典程序

标题:带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序
摘要:
本文针对带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序进行详细分析。主要包含了2台西门子PLC1215程序和2台西门子触摸屏TP700程序的相关内容,以及PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言)、PLC和ABB机器人Modbus TCP通讯(SCL语言)、PLC和码垛机Modbus TCP通讯(SCL语言)以及PLC和4台G120变频器Profinet通讯等关键技术点。通过SCL语言和梯形图混编的方式,展示了如何进行经典程序的开发,以及相应的知识点和注释。
-
引言
带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序是一种应用于现代物流行业中的自动化设备。本文将详细讨论该程序的开发和技术实现。 -
硬件设备介绍
2.1 PLC1200
PLC1200是一种性能强大的西门子PLC,本文将详细介绍其在该程序中的应用。
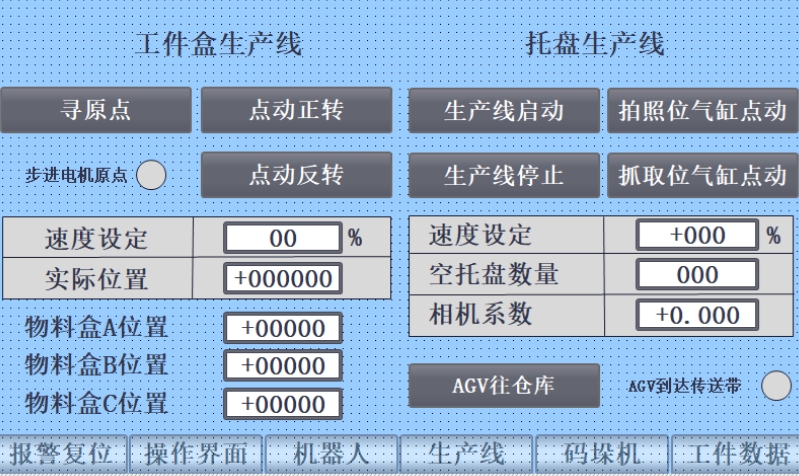
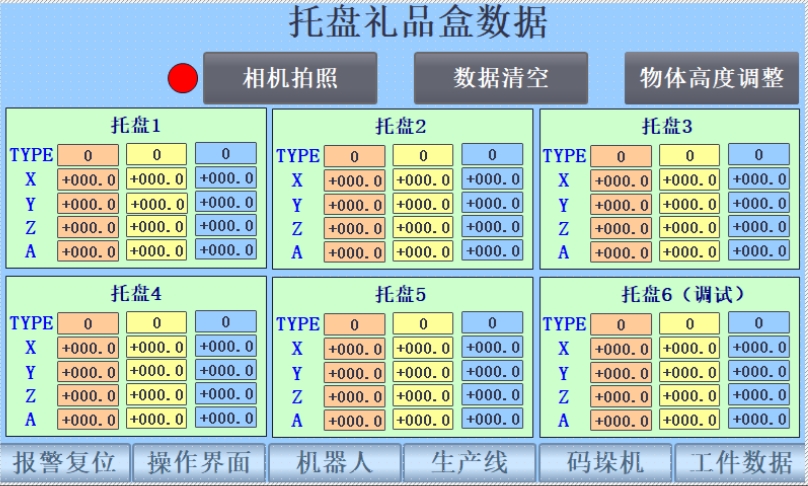
2.2 西门子触摸屏TP700
TP700触摸屏在该程序中的作用不可忽视,本文将对其功能和使用进行详细解析。
- 技术实现
3.1 基恩士相机视觉定位
通过Modbus TCP通讯和SCL语言,本文将分析如何实现PLC和基恩士相机视觉定位的功能,并详细介绍相关原理和步骤。
3.2 ABB机器人通讯
本文将通过Modbus TCP通讯和SCL语言,详细介绍如何实现PLC和ABB机器人的通讯,并探讨通讯协议和数据传输方式。
3.3 码垛机通讯
通过Modbus TCP通讯和SCL语言,本文将分析PLC和码垛机的通讯原理和实现步骤,并提供相关的技巧和建议。
3.4 G120变频器通讯
Profinet通讯在该程序中的应用不可忽视,本文将详细介绍其和PLC的通讯方式,并分析通讯过程中的关键问题。
-
程序开发与注释
本文将对SCL语言和梯形图的混编方式进行详细阐述,同时对程序中的关键模块进行注释,以便读者更好地理解和使用。 -
结论
本文围绕带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序展开了全面而深入的分析。通过对硬件设备和关键技术点的介绍,以及程序开发和注释的详细阐述,读者可以更好地理解和应用相关技术,实现自动化设备的高效运行。
关键词:PLC1200,SCL语言,梯形图,混编,立体库,机器人码垛机,伺服视觉程序,Modbus TCP通讯,Profinet通讯,注释
以上相关代码,程序地址:http://coupd.cn/630177690446.html















 1214
1214











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









