






 本文详细描述了一种结合了西门子PLC1200、SCL语言、梯形图和视觉定位技术的立体库机器人码垛系统。系统包含PLC与相机、机器人、码垛机和变频器间的多协议通讯,以及SCL与梯形图的混合编程。
本文详细描述了一种结合了西门子PLC1200、SCL语言、梯形图和视觉定位技术的立体库机器人码垛系统。系统包含PLC与相机、机器人、码垛机和变频器间的多协议通讯,以及SCL与梯形图的混合编程。
带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序
包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序
PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言)
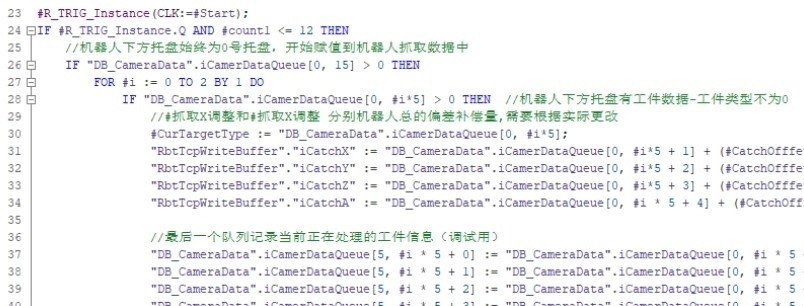
PLC和ABB机器人Modbus TCP通讯(SCL语言)
PLC和码垛机Modbus TCP通讯(SCL语言)
PLC和4台G120变频器Profinet通讯
1个伺服轴
SCL语言和梯形图混编,经典程序,知识点丰富,注释全。
ID:6315667935713915
工控教学
标题:基于相机PLC1200的SCL梯形图混编立体库机器人码垛系统
摘要:本文介绍了基于相机PLC1200的SCL梯形图混编立体库机器人码垛系统的设计和实现。系统包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序,其中PLC和基恩士相机视觉定位采用Modbus TCP通讯(SCL语言),PLC和ABB机器人、码垛机以及4台G120变频器采用Profinet通讯。同时,该系统还涉及1个伺服轴的控制。本文将详细描述系统的架构设计和关键技术实现,包括SCL语言和梯形图混编、经典程序设计和知识点的丰富注释。
第一章 引言
1.1 研究背景
在当前工业自动化领域,码垛技术被广泛应用于物流仓储和生产流程中,以提高生产线的灵活性和效率。为了实现精准的码垛操作,需要综合运用PLC、相机视觉定位、机器人和变频器等技术。本文基于相机PLC1200,设计了一个具有高度灵活性和可靠性的立体库机器人码垛系统。
1.2 研究目的
本文旨在探索基于相机PLC1200的SCL梯形图混编立体库机器人码垛系统的设计和实现方法,通过对系统的架构设计和关键技术实现进行详细分析,为类似的自动化控制系统提供参考和借鉴。
第二章 系统设计
2.1 系统组成
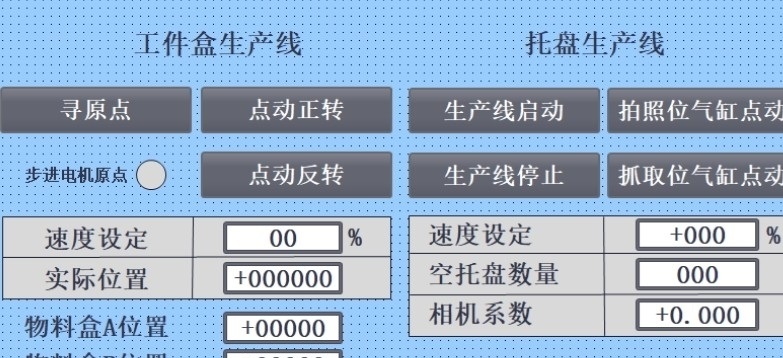
本系统由2台西门子PLC1215程序和2台西门子触摸屏TP700程序组成,其中PLC和基恩士相机视觉定位采用Modbus TCP通讯(SCL语言),PLC和ABB机器人、码垛机以及4台G120变频器采用Profinet通讯。系统还包括1个伺服轴,通过SCL语言和梯形图混编的方式实现多种功能。
2.2 系统架构
系统的架构分为硬件架构和软件架构两部分。硬件架构包括相机PLC1200、PLC1215、触摸屏TP700、基恩士相机、ABB机器人、码垛机和G120变频器等设备。软件架构主要由SCL语言、梯形图混编和经典程序设计组成。
2.3 系统功能
本系统主要实现以下功能:
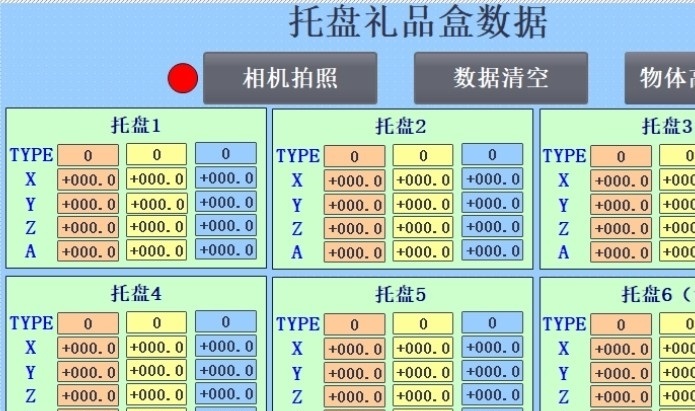
- 基恩士相机视觉定位,通过Modbus TCP通讯实现与PLC的数据交换;
- PLC和ABB机器人、码垛机、G120变频器之间的数据通讯,采用Profinet通讯协议;
- 控制伺服轴的运动;
- SCL语言和梯形图混编,实现系统的多样化控制。
第三章 技术实现
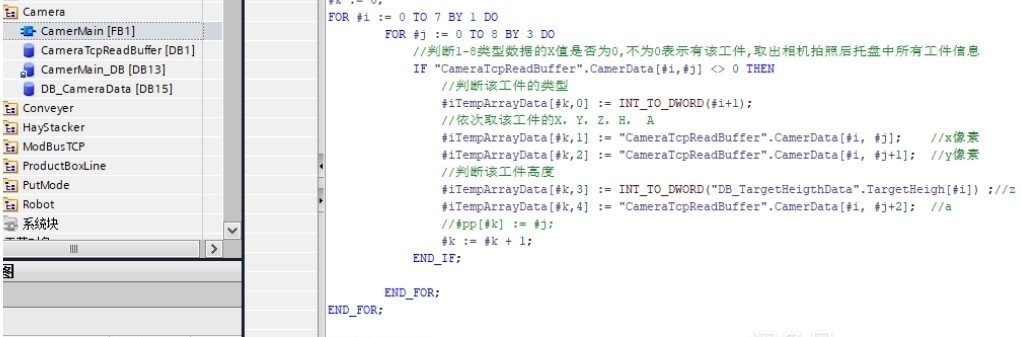
3.1 基恩士相机视觉定位
通过Modbus TCP通讯协议实现了基恩士相机视觉定位功能,该功能可以高精度地识别和定位待码垛的物品。
3.2 Profinet通讯
采用Profinet通讯协议,实现了PLC和ABB机器人、码垛机以及G120变频器之间的数据交换,确保系统各个组件之间的协同工作。
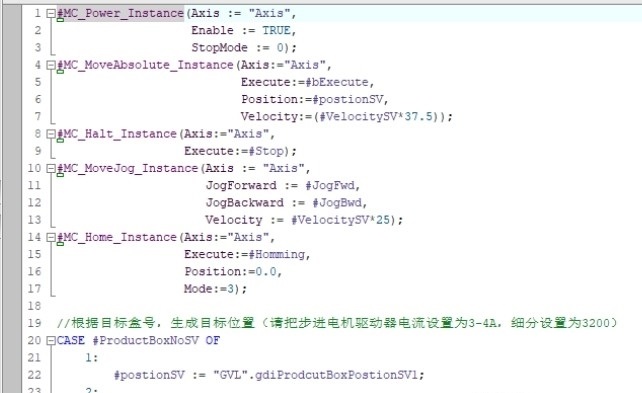
3.3 伺服轴的控制
通过适当的控制算法和参数配置,实现对伺服轴运动的控制,确保码垛操作的准确性和稳定性。
3.4 SCL语言和梯形图混编
本系统主要利用SCL语言和梯形图混编的方式进行程序设计,通过经典的程序设计思想和丰富的知识点注释,提高程序的可读性和可维护性。
第四章 实验结果与分析
本章将详细介绍系统的实际应用结果和分析,包括系统的稳定性、精度和响应速度等方面。
第五章 总结与展望
通过本文的研究,基于相机PLC1200的SCL梯形图混编立体库机器人码垛系统在实际应用中取得了良好的效果。未来,可以进一步优化系统的性能和功能,以满足不同应用场景的需求。
参考文献:
[1] 《TIA Portal常用指令集详解》
[2] 《西门子PLC实用技术手册》
以上相关代码,程序地址:http://matup.cn/667935713915.html















 3055
3055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









