






带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序
包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序
PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言)
PLC和ABB机器人Modbus TCP通讯(SCL语言)
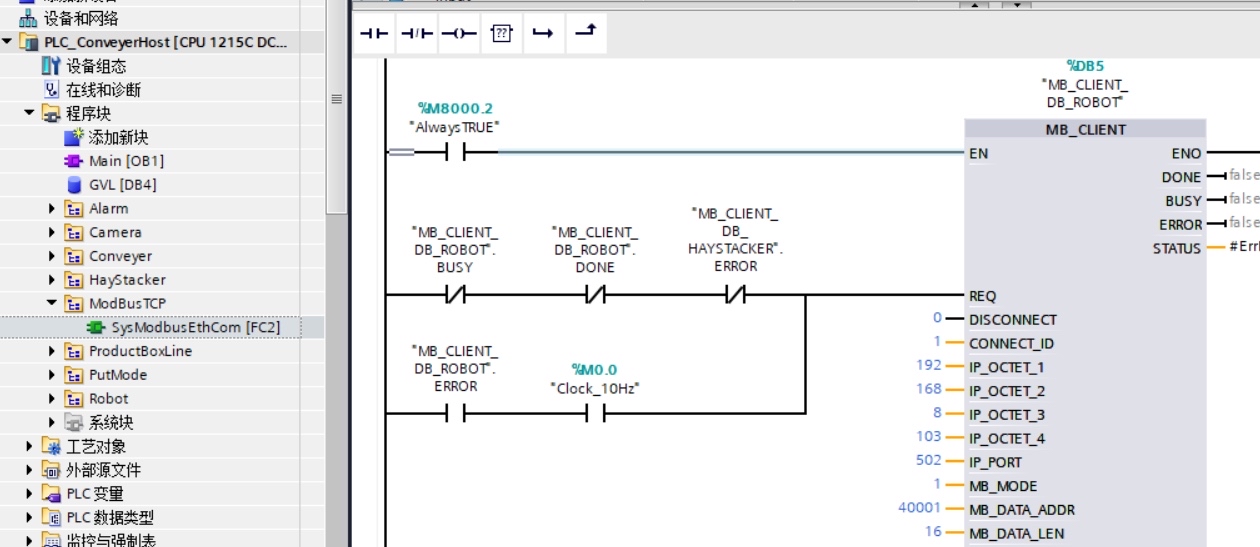
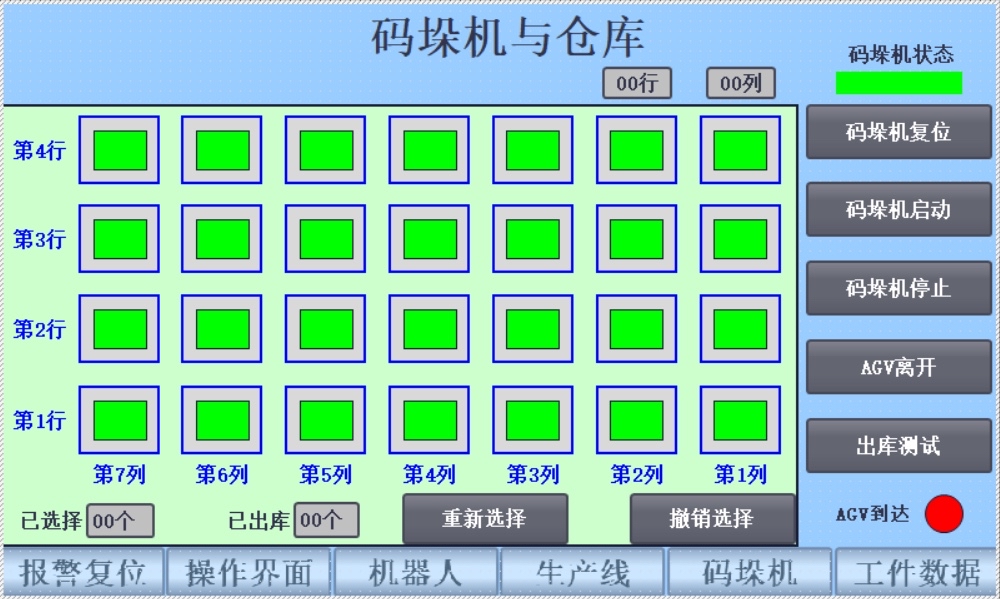
PLC和码垛机Modbus TCP通讯(SCL语言)
PLC和4台G120变频器Profinet通讯
1个伺服轴
SCL语言和梯形图混编,经典程序,知识点丰富,注释全。
程序版本TIA V14及以上
ID:498675518575204
汇科自控


带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序
在现代工业自动化领域,机器人技术的应用越来越广泛,其在生产线上的高效率和精确性极大地提高了生产效率。其中,码垛机器人作为一种常见的应用形式,被广泛用于物料的堆垛和搬运。本文将围绕带相机PLC1200 SCL梯形图混编的立体库机器人码垛机伺服视觉程序展开讨论。
首先,该程序中使用了两台西门子PLC1215程序和两台西门子触摸屏TP700程序。PLC作为控制主机,通过与触摸屏的通讯实现对机器人的操作和监控。通过PLC与基恩士相机视觉定位的Modbus TCP通信,实现对机器人的视觉定位功能。这种组合的应用可以有效地提高机器人的定位精度和稳定性。
其次,在本程序中,PLC还通过Modbus TCP通信实现与ABB机器人的通讯。这种通讯方式能够使PLC与机器人之间实现数据的传输和指令的下达,进而实现机器人的自动化操作。此外,PLC还通过Modbus TCP通信与码垛机进行通讯,实现对码垛机的控制。这种多种通信方式的应用,使机器人的控制和操作更加灵活多样化。
另外,本程序中还涉及到了PLC与4台G120变频器的Profinet通信。通过这种通信方式,PLC可以实时监控和控制变频器的运行状态,达到对机器人运动的精确控制。此外,程序中还包括一个伺服轴的应用,通过对伺服驱动器的控制,实现对机器人的精准位置控制。这些控制方式的应用,使机器人的运动更加精确和平滑。
最后,本程序中的语言编写主要采用SCL语言和梯形图混编的方式。SCL语言作为一种高级的编程语言,结合了梯形图的直观性和SCL语言的灵活性,使得程序的编写更加简洁和高效。同时,该程序中的经典程序和注释全面,为读者提供了丰富的知识点和实用的编程技巧。
总结起来,带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序是一种结合了多种技术的先进自动化系统。通过该程序的应用,可以实现机器人的高效码垛操作,提高生产效率和产品质量。该程序采用了多种通讯方式和控制技术,为读者提供了丰富的参考价值和学习指导。通过学习该程序,读者可以深入理解机器人编程和控制的原理,提高自己在工业自动化领域的专业水平。
以上相关代码,程序地址:http://coupd.cn/675518575204.html















 2513
2513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









