







AF性能是判断相机好坏的重要指标,主要从准确度和速度两个方面来进行考察,本文将介绍自动对焦的几种方式。
自动对焦目前主流的大致上有CDAF,PDAF和Laser assist AF这三种。前两种属于被动式,也就是说相机不需要其他额外辅助的探测手段,直接使用入射光线做判断来对焦;而第三种属于主动式,也就是说需要使用Laser来辅助探测,这在后面会详细介绍。
1 CDAF (contrast detection auto focus)
反差对焦是假设对焦成功后相邻像素点的对比度最大,这种方式的光学设计是最简单的。
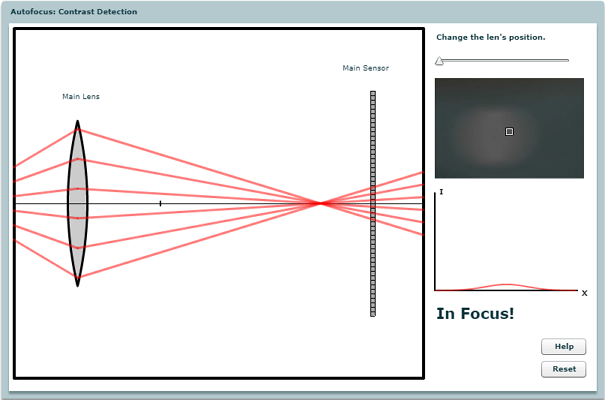
从上图可以看到,右上图中的白色方框代表对焦点,此处反射出的红色光线在经过镜头,到达传感器前就汇聚在一点,随后又散开,此时图像的对比度是很低的。
将这个对焦点与相邻像素的对比度作分析得出右下角的曲线,失焦状态下对比度低,在聚焦过程中,曲线变得逐渐变得倾斜,但是不能判断什么时候是最高点,只有经过了对焦点后曲线下降再往回移动,反复移动后可以得到一个局部梯度最大值,就认为是对焦成功。
详细过程可以从这个链接可以看到。
优点:光学设计简单。
缺点:a. 速度较慢,在出现失焦图像时,机器无法判断该移动多少,甚至往哪个方向移动镜头才能聚焦,甚至到了峰值也不知道,必须移动过了以后再往回移动,来回几次后才能找到对焦点;
b. 在物体对比度较低时会对焦失败,比如雪景,无云的蓝天以及各种纯色的图像。
2 PDAF (phase detect auto focus)
相位对焦最早是在单反上使用的,也是最常用的被动式对焦方法,光学通路也比较复杂。
Nikon F4上的光学设计通路如下图所示:
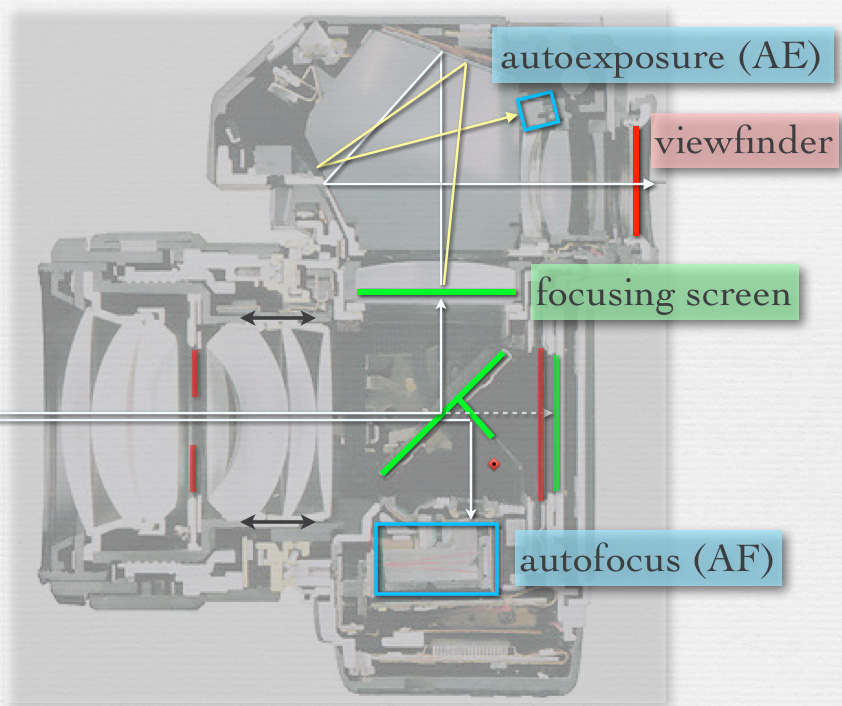
在对焦过程中,白色入射光被一个斜45度角的反光镜拦截,部分向上分光到调焦屏,供预览和AE使用,此时预览看到的图像和拍照的是一致的;剩下的光被次级反射镜向下分到AF模块。
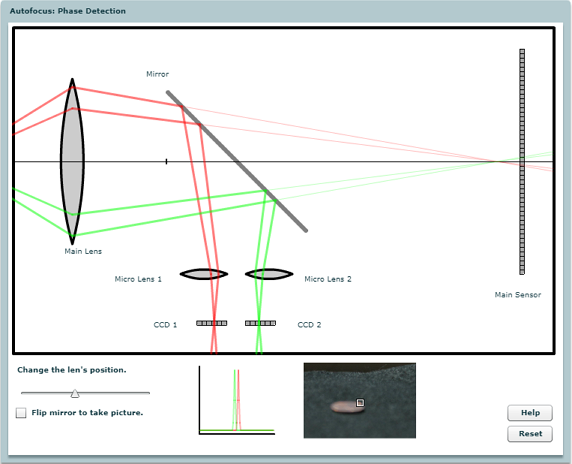
可以从下图中看到AF模块的工作原理。AF模块中有两个或者多个小图像传感器(CCD1/2),并且都是一维的,也就是说是由一列像素构成,每个传感器上有一个小的透镜(Micro lens),这些传感器是成对出现,每一对就构成了一个自动对焦点,下图中的对焦点是右下侧图片中央的白色方框。在失焦状态下,红光照射在光圈右侧,绿光照射在光圈左侧,在传感器上的相位就无法匹配,图像中央其实是一个硬币,但为了方便将相位表示成只有一个峰值的曲线,也就是一个黑色背景的白点,真实图像的曲线实际上比较复杂。当移动镜头Main lens的时候,光线的相位会慢慢靠近直至重合,当重合时就认为对焦成功。在图像处理中识别相位重合的方式有很多种,Cross-correlation就是其中一种。由于根据相差可以精确计算出main lens需要移动的方向以及距离,因此PDAF就比CDAF速度要快许多。
详细信息可以这个链接中查看。
由于对焦速度快,在2014年左右被全面引入到手机上,然而手机上没有足够空间来实现如此复杂的光学通路,因此业界就拿sensor做文章,如下图所示在原有的(a)Bayer CFA sensor基础上将部分G替换成(b)PD 像素,变成了(c) PDAF sensor。
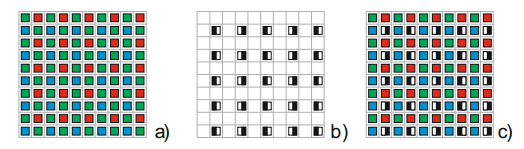
这样也就无需改变原有的光学通路,直接根据PDAF计算出相差来移动镜头。当然这些被PD像素所取代的像素点必须根据周围像素点的值来做补偿,具体补偿方式就由各ISP厂商来决定。
优点:速度快。
缺点:
a. 需要专用PDAF sensor,并且有精度损失;
b. 在暗处效果较差,无法完全取代CDAF。
3 Laser Assit AF
激光辅助对焦在单反上的前生是潜艇的超声波测距系统。
超声波测距原理就是发出一组超声波,接收器根据超声波的返回时间来计算距离;同样在单反上的激光辅助对焦是发出一组红外光,根据接收到的时间来计算距离。
优点:激光辅助对焦完美地补充了PDAF在弱光条件下,以及CDAF在对比度底场景下的不足。
缺点:
a. 所谓激光其实是红外线光,因此在物体本身有红外射线(比如烛光,人脸)的情况下就会失效;
b. 如果有红外射线无法穿透玻璃,因此有玻璃情况下也会失效。
参考资料:
https://electronics.howstuffworks.com/autofocus.htm
https://graphics.stanford.edu/courses/cs178/applets/autofocusPD.html
https://graphics.stanford.edu/courses/cs178/applets/autofocusCD.html
《A Simple Model for On-Sensor Phase-Detection Autofocusing Algorithm》
https://en.wikipedia.org/wiki/Rangefinder_camera#Digital_rangefinder

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









