






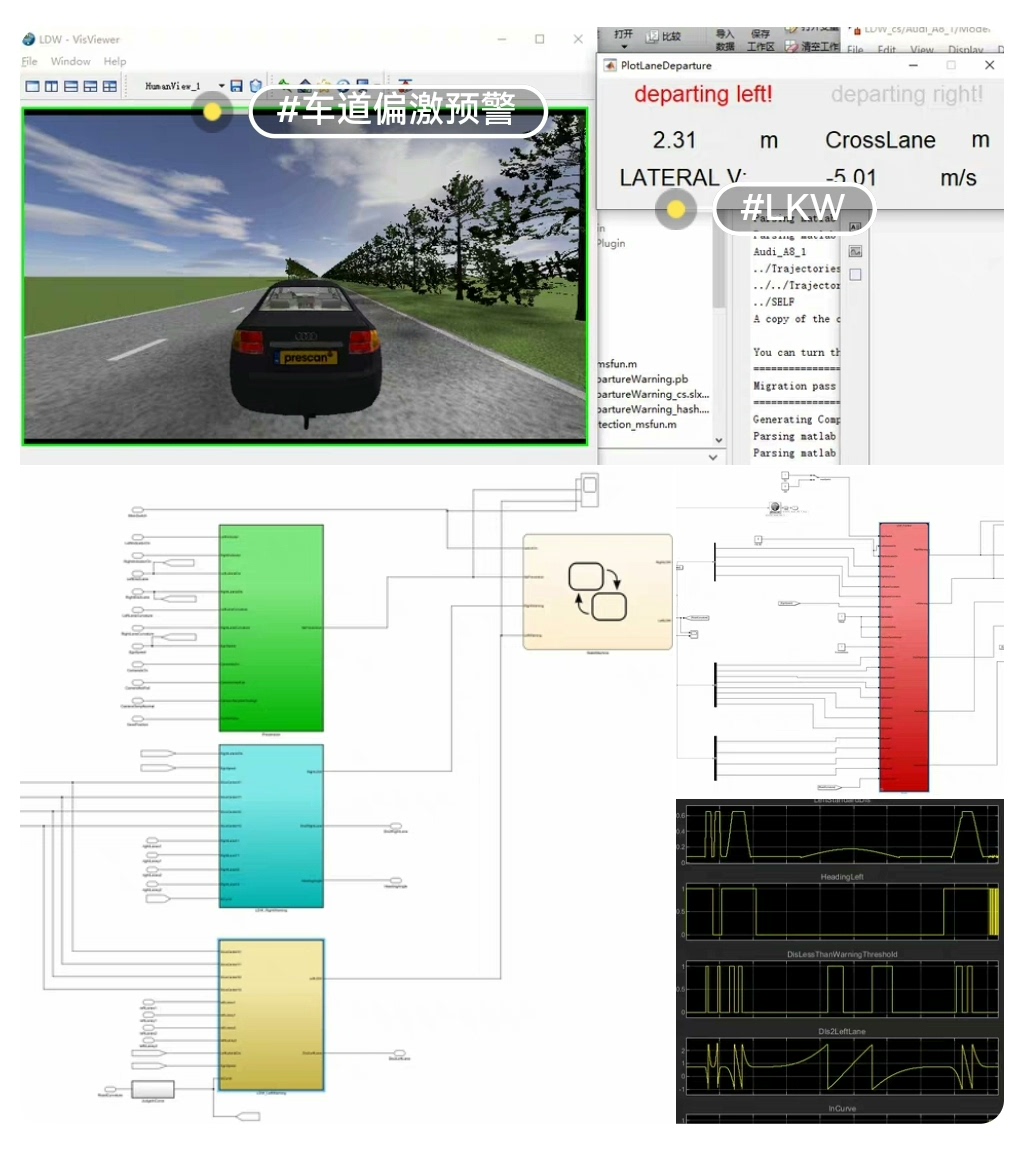
自动驾驶控制器,车道偏离预警系统,基于Prescan设计场景和交通流,在Simulink中建立了相应的控制模型。
进行LDW功能验证。
整个模型自己建立,再次强调不是Prescan自带的那种很乱很模糊的模型。
然后通过自己做了一个GUI的界面实时显示车辆当前位置信息,以及发出偏离预警警报
ID:61120699034573240
工业研究院
标题:基于Prescan的自动驾驶控制器及车道偏离预警系统设计与验证
摘要:本文介绍了一种基于Prescan设计场景和交通流,在Simulink中建立的自动驾驶控制器以及车道偏离预警系统的设计与验证方法。通过自建模型,并利用GUI界面实时显示车辆位置信息和发出预警警报,实现了LDW功能的验证。本文将详细阐述设计过程和验证结果,以期为自动驾驶技术的发展提供有益的参考。
-
引言
随着人工智能和自动驾驶技术的迅猛发展,自动驾驶控制器及其相关系统成为汽车行业的关注焦点。其中,车道偏离预警系统(LDW)作为自动驾驶技术的核心功能之一,具有重要意义。本文基于Prescan平台,设计了一种自动驾驶控制器,并在Simulink中建立了相应的控制模型,用于LDW功能的验证。 -
系统设计与模型建立
2.1 Prescan平台简介
Prescan是一种用于虚拟场景建模和仿真的软件平台,广泛应用于自动驾驶领域。本文利用Prescan平台设计车辆行驶场景和交通流,为自动驾驶控制器及车道偏离预警系统的设计与验证提供仿真环境。
2.2 自动驾驶控制器设计
本文自建了自动驾驶控制器模型,旨在实现车辆的自动驾驶功能。控制器的设计考虑了车辆的加速度、转向等控制信号,并通过与Prescan平台集成,实现了对车辆行为的模拟和控制。
2.3 车道偏离预警系统设计
LDW功能是自动驾驶控制器的核心功能之一。本文在模型中加入了车道偏离预警系统,通过监测车辆相对于车道中心线的位置,提前发出预警信号,以引起驾驶员的注意并防止车辆偏离车道。
-
验证方法与实验结果
为验证自动驾驶控制器及车道偏离预警系统的性能,本文采用了实时可视化的方式,通过GUI界面实时显示车辆当前位置信息,并能够发出偏离预警警报。实验结果表明,该控制器能够准确控制车辆行为,并及时发出预警信号,可有效防止车辆偏离车道。 -
讨论与展望
本文设计了一种基于Prescan的自动驾驶控制器,并实现了车道偏离预警系统的功能验证。然而,在实际应用中仍存在诸多挑战,如不同交通场景的适配、精确的车辆定位等。未来的研究可以进一步优化控制器设计,提高预警系统的准确性和时效性,以实现更加安全和可靠的自动驾驶技术。
结论:本文基于Prescan平台设计了一种自动驾驶控制器,并通过模型建立和GUI界面实时显示验证了车道偏离预警系统的可行性。实验结果表明,该系统能够准确控制车辆行为,并及时发出预警信号,具备一定的应用前景。本研究为自动驾驶技术的发展提供了有益的参考,并为进一步优化自动驾驶控制器和预警系统提供了思路。
【相关代码,程序地址】:http://fansik.cn/699034573240.html
















 461
461

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









