






ADRC双环自抗扰控制永磁同步电机矢量控制伺服系统Matlab仿真模型
1.模型简介
模型为基于双环自抗扰控制(ADRC)的永磁同步电机伺服控制仿真,采用Matlab R2018a/Simulink搭建。
其中,位置环和转速环合并成一环,采用二阶自抗扰控制器,电流环采用一阶自抗扰控制器,因此称为双环自抗扰伺服控制。
模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、非线性跟踪微分器(NLTD)、采用二阶自抗扰控制器的位置速度环、采用一阶自抗扰控制器的电流环等模块,其中,SVPWM、Clark、Park、Ipark、非线性跟踪微分器、自抗扰控制器模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。
模型均采用离散化仿真,其效果更接近实际数字控制系统。
2.算法简介
通常永磁同步电机伺服系统由位置环、转速环和电流环构成,本仿真中,将位置环和转速环合并成一环,采用二阶自抗扰控制器,电流环采用一阶自抗扰控制器,因此称为双环自抗扰伺服控制。
位置速度环中,首先位置给定通过非线性跟踪微分器安排过渡过程得出新的平滑的位置给定和其一阶微分即速度给定,然后输入到二阶自抗扰控制器中,位置环和速度环做成一个环路,能够有效地简化系统环路调试过程。
在电流环中,自抗扰控制器将电压耦合项视为扰动观测并补偿,能够实现电流环解耦。
自抗扰控制器的快速性和抗扰性能较好,其待整定参数少,且物理意义明确,比较容易调整。
3.仿真效果
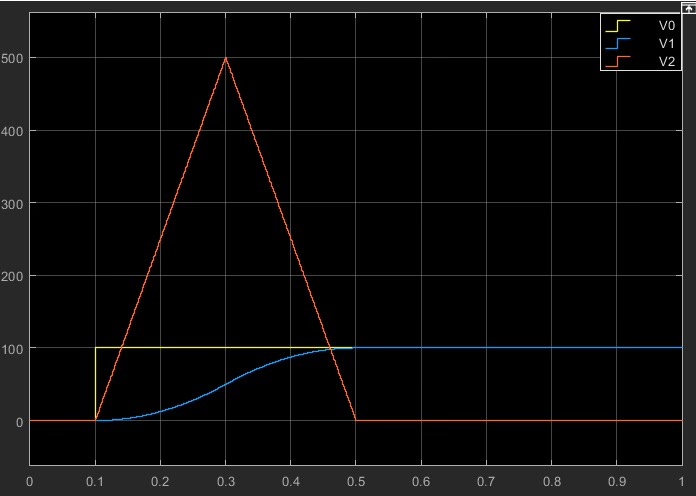
① 非线性跟踪微分器响应波形,如下图1所示。
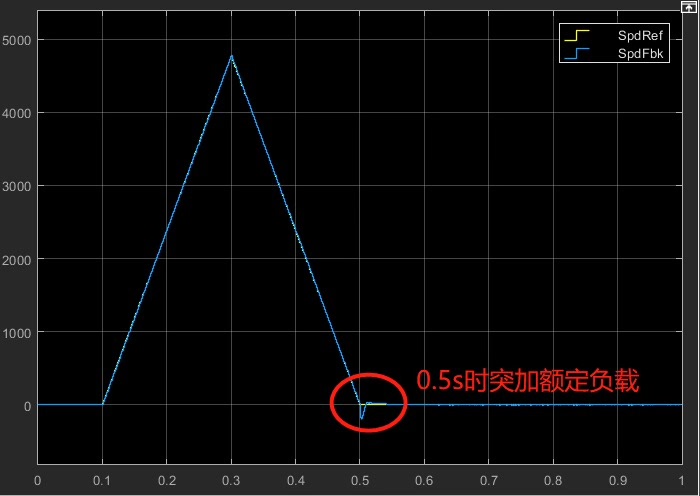
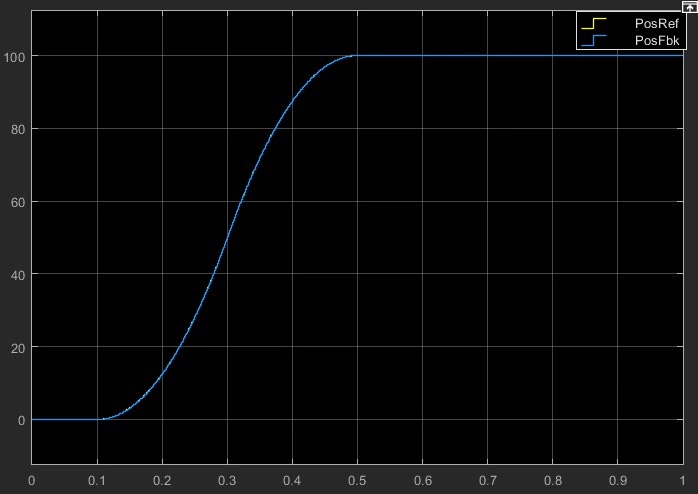
② 位置响应波形(0.5s时突加额定负载)如下图2所示。
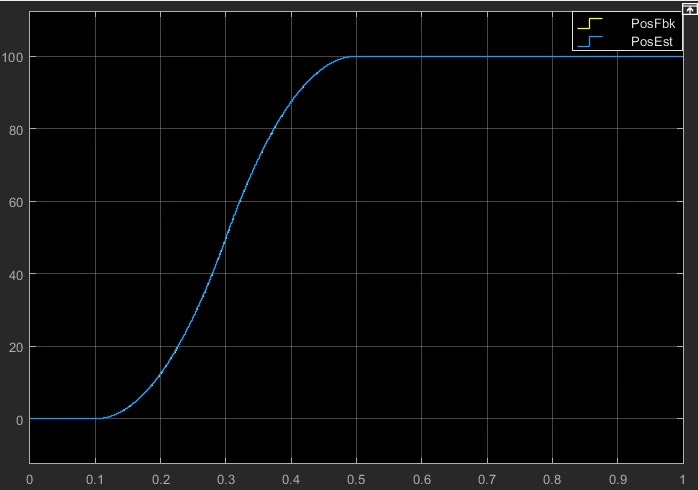
③ 估计位置与实际位置波形,如下图3所示。
④ 转速波形,如下图4所示。
⑤ 估计转速与实际转速波形,如下图5所示。
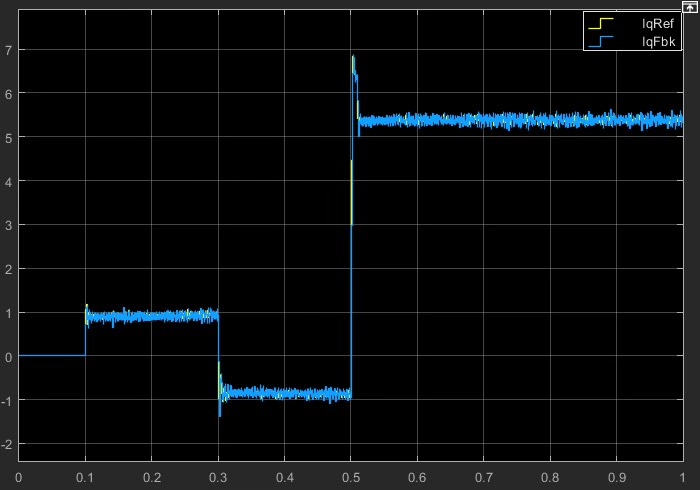
⑥ Iq电流响应波形,如下图6所示。
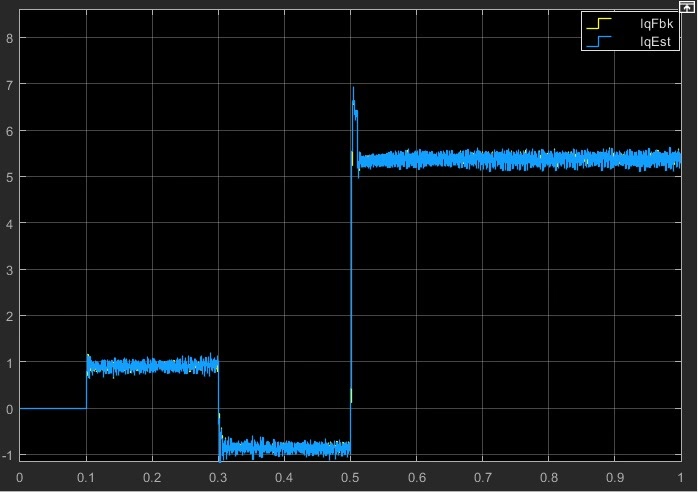
⑦ 估计Iq和实际Iq波形,如下图7所示。
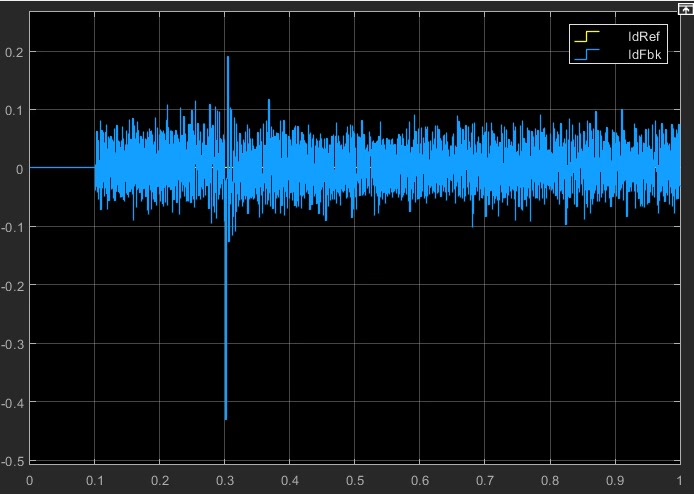
⑧ Id电流响应波形,如下图8所示。
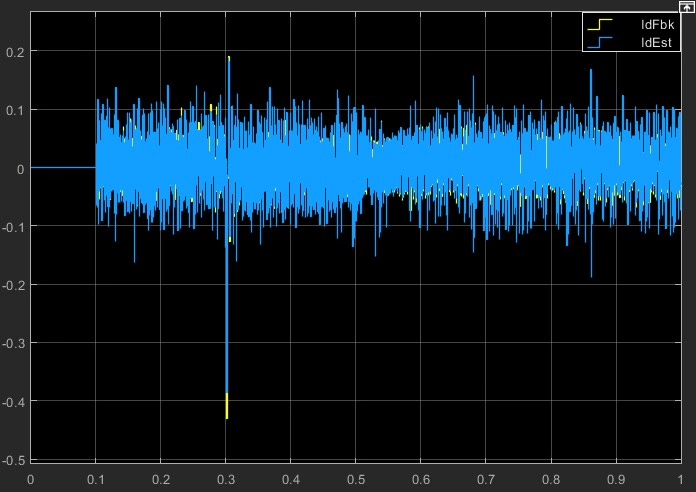
⑨ 估计Id和实际Id波形,如下图⑨所示。
4.
可提供模型内相关算法的参考文献,避免大量阅读文献浪费时间
ID:89135701102413480
怎落笔都不对

ADRC双环自抗扰控制永磁同步电机矢量控制伺服系统Matlab仿真模型
-
模型简介
本文介绍一种基于双环自抗扰控制(ADRC)的永磁同步电机伺服控制仿真模型,该模型使用Matlab R2018a Simulink进行搭建。
该模型采用了二阶ADRC控制器作为位置速度环和一阶ADRC控制器作为电流环,因此被称为双环自抗扰伺服控制。
模型中包含了DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、非线性跟踪微分器(NLTD)、二阶ADRC控制器、一阶ADRC控制器等模块。其中,SVPWM、Clark、Park、Ipark、非线性跟踪微分器和自抗扰控制器模块使用Matlab function编写,其与C语言编程较为接近,便于实物移植。
模型采用离散化仿真,更接近实际数字控制系统的效果。 -
算法简介
通常,永磁同步电机伺服系统由位置环、转速环和电流环构成。本文中,位置环和转速环合并成一环,采用二阶ADRC控制器,电流环采用一阶ADRC控制器,从而实现双环自抗扰伺服控制。
在位置速度环中,首先通过非线性跟踪微分器对位置给定进行处理,得到平滑的位置给定和一阶微分即速度给定。然后将它们输入二阶ADRC控制器,将位置环和速度环合成一个环路,有效简化了系统环路调试过程。
在电流环中,ADRC控制器将电压耦合项视为扰动观测并进行补偿,实现电流环解耦。
ADRC控制器具有较好的快速性和抗扰性能,参数较少,且具有明确的物理意义,因此调整较为容易。 -
仿真效果
本文通过仿真结果展示了该模型的各项效果,包括:
① 非线性跟踪微分器的响应波形。
② 位置的响应波形(0.5s时突加额定负载)。
③ 估计位置与实际位置的波形。
④ 转速的波形。
⑤ 估计转速与实际转速的波形。
⑥ Iq电流的响应波形。
⑦ 估计Iq和实际Iq的波形。
⑧ Id电流的响应波形。
⑨ 估计Id和实际Id的波形。 -
基于模型的参考文献
由于篇幅限制,本文无法提供模型内相关算法的参考文献,请读者自行查阅相关文献以获得深入了解。以下是一些参考文献推荐:- J. Han, “From PID to active disturbance rejection control,” IEEE Transactions on Industrial Electronics, vol. 56, no. 3, pp. 900-906, 2009.
- 任勇, 石亚红, 陈亮. ADRC自抗扰控制及其在磁浮控制中的应用. 自动化学报, 2004, 30(3): 319-326.
- 赵英敏, 曲伟, 王庆. 双环自抗扰电流控制研究[J]. 电子技术应用, 2017, 43(3): 35-37.
以上是对ADRC双环自抗扰控制永磁同步电机矢量控制伺服系统Matlab仿真模型的简要介绍和仿真效果展示,该模型能够有效地实现永磁同步电机的精确控制,具有较好的性能指标。希望本文能为相关研究和工程应用提供一定的参考和借鉴。
【相关代码,程序地址】:http://fansik.cn/701102413480.html
















 1001
1001

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









