







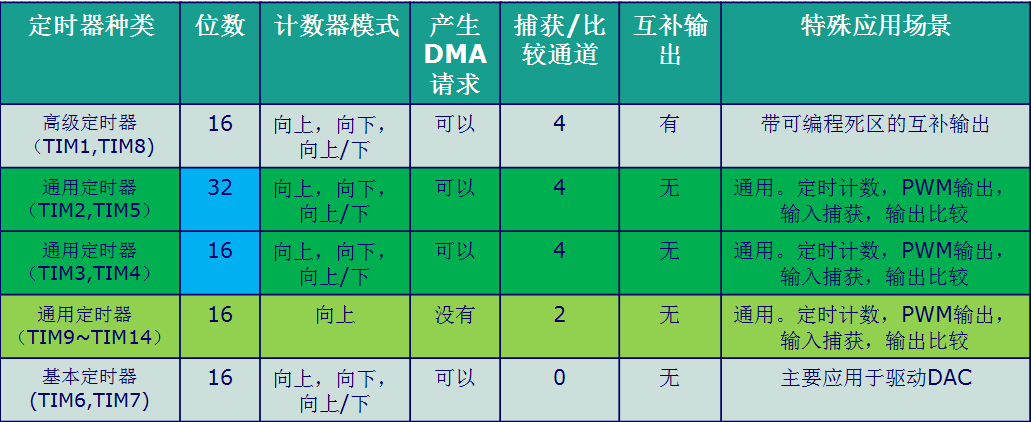
特性
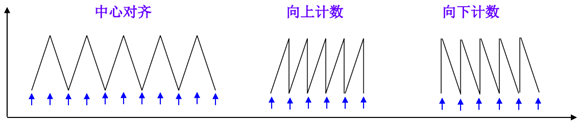
计数器模式
通用计时器支持向上计数,向下计数,向上向下双向计数三种模式。
向上计数模式
计数器从0计数到自动加载值,然后重新从0开始计数,并产生一个计数器溢出事件向下计数模式
计数器从自动装载值开始向下计数到0,然后从自动装载值重新开始,并产生一个向下溢出事件中央对其模式(向上/向下计数)
计数器从0开始计数到(自动载入值-1)产生一个计数器溢出事件,然后向下计数到1,产生一个计数器溢出事件,然后再从0开始重新计数
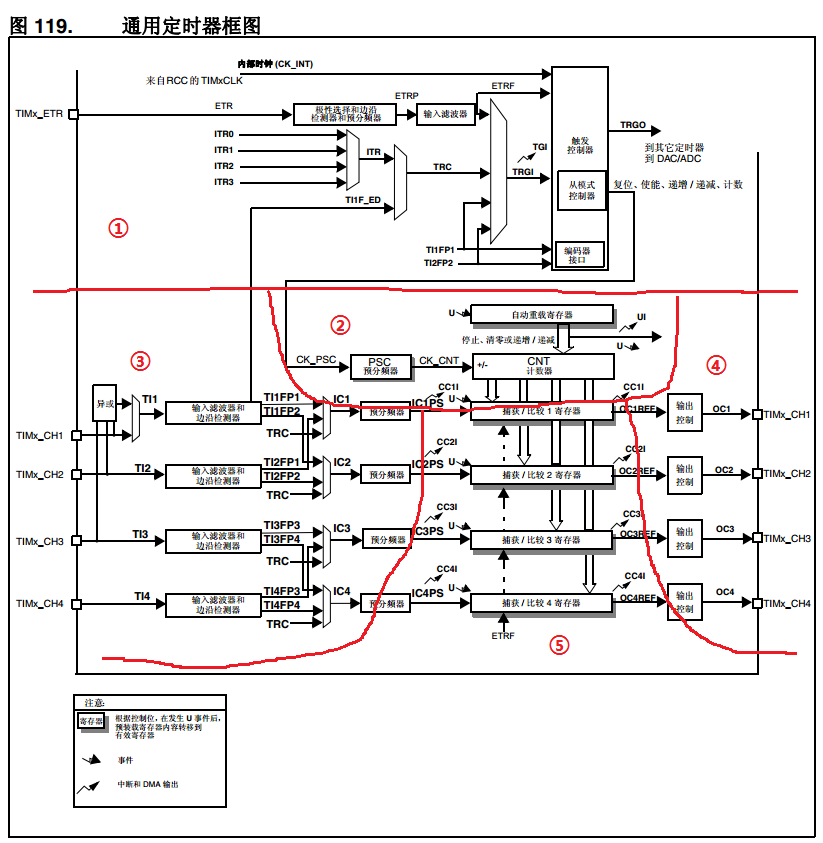
通用定时器框图
框图由五部分组成
产生时钟源CK_PSC
时钟来源
内部RCC
外部引脚TIMx_ETR
内部触发输入口(ITR0~ITR3),用于定时器级联
外部通道引脚TIMx_CH1,TIMx_CH实基单元(time-base unit)
根据向上向下的设定,进行技术,并从自动重载寄存器中加载计数值输入捕获
四个输入通道输出比较
根据比较值,输出事件相关寄存器
操作步骤
- 使能定时器时钟
- 设置定时器计数值和分频系数
- 使能定时器中断
- 使能定时器
- 设置定时器中断分组
- 编写定时器中断服务函数
定时器中断事件比较多,在中断服务函数中对特定事件进行判断,处理。注意处理完成后,清除中断标志位。
void TIM3_IRQHandler(void)
{
if(TIM3->SR & 0x0001)
{
LED1 = !LED1;
}
TIM3->SR &= ~(1<<0);
}
void TIM3_Init(u16 arr, u16 psc)
{
RCC->APB1ENR |= 1<<1;
TIM3->ARR = arr;
TIM3->PSC = psc;
TIM3->DIER |= 1<<0;
TIM3->CR1 |= 0x01;
MY_NVIC_Init(1, 3, TIM3_IRQn, 2);
}
int main(void)
{
sys_init();
while(1)
{
LED0 = !LED0;
delay_ms(200);
}
}
static void sys_init(void)
{
Stm32_Clock_Init(336, 8, 2, 7);
delay_init(168);
led_init();
TIM3_Init(5000-1, 8400-1);
}
参考
STM32F3与 F4 系列 Cortex M4 内核编程手册
STM32F4xxx中文参考手册
STM32F4xxx英文参考手册
STM32F4 开发指南(寄存器版)















 230
230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









