






六自由度机械臂建模仿真(matlab程序),有控制面板,代码可流畅运行
机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解,蒙特卡洛采样画出末端执行器工作空间
ID:8380680368606738
RL布丁先生
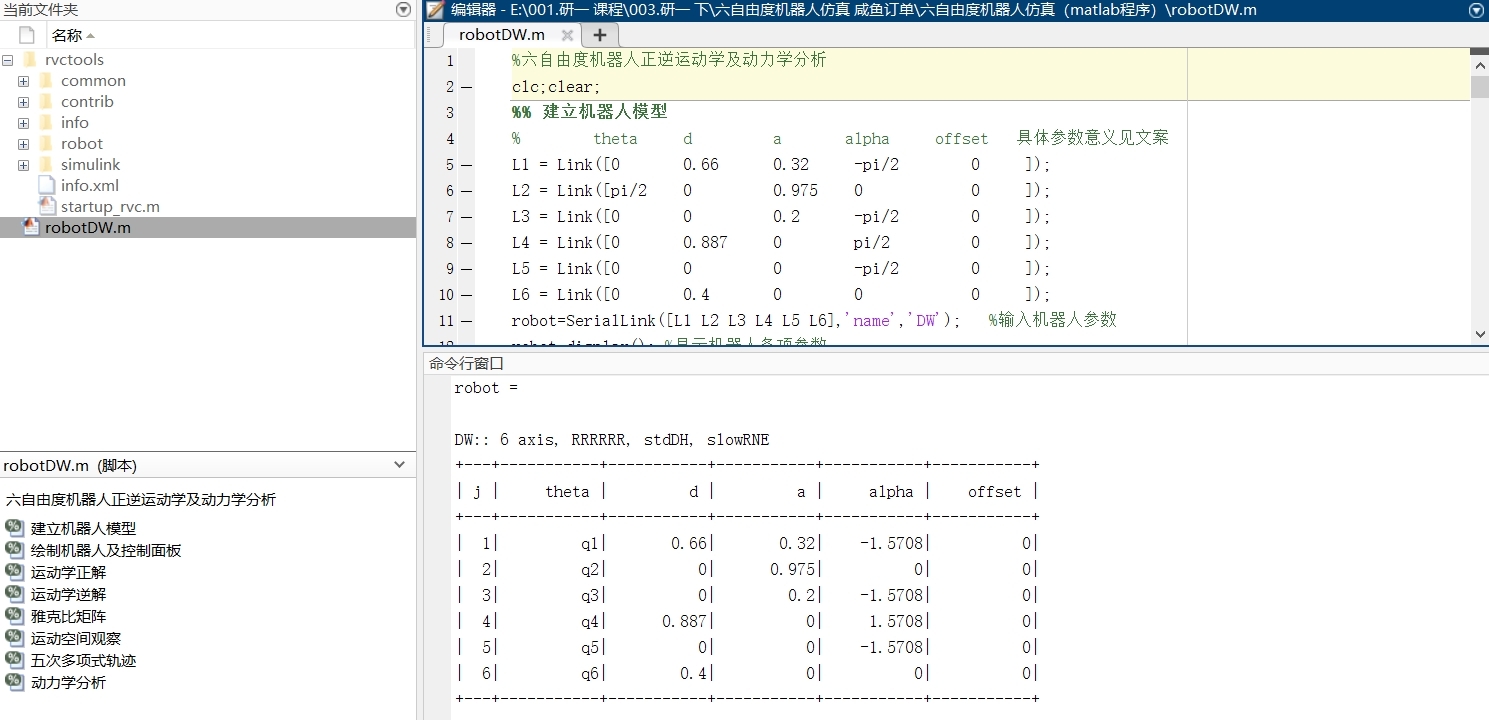
机器人技术的快速发展为各行各业带来了许多便利与可能性。而机械臂作为机器人的重要组成部分,其运动学与动力学建模仿真以及轨迹规划技术的研究也日益受到关注。本文将围绕六自由度机械臂的建模仿真进行探讨,并介绍利用MATLAB程序开发的控制面板,实现流畅运行的代码。
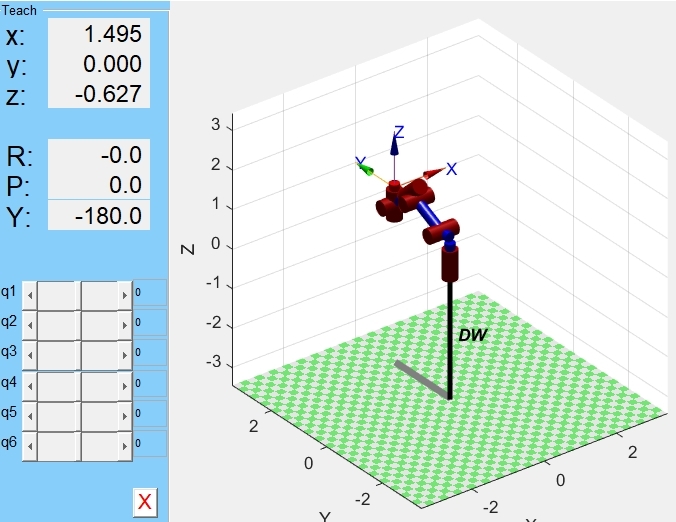
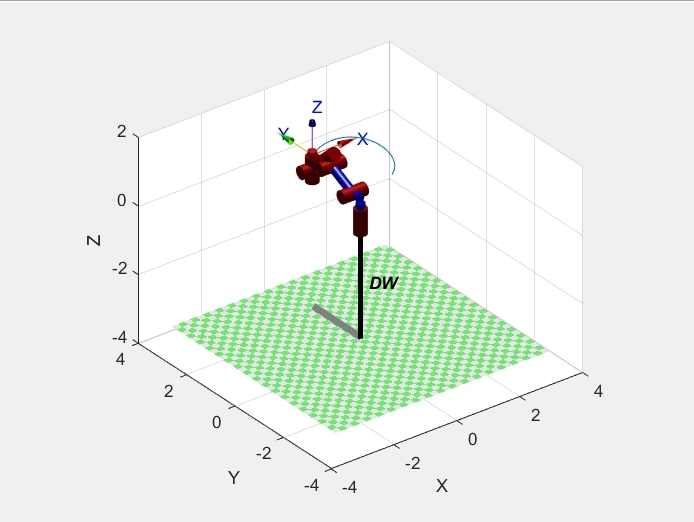
首先,机器人的运动学正逆解是机械臂建模仿真的基础。运动学正解是指通过给定机械臂各个关节的角度,推导出机械臂末端执行器的位置和姿态。而运动学逆解则是指根据给定的目标位置和姿态,计算出机械臂各个关节的角度。利用雅可比矩阵求解方法,可以较为准确地计算出机械臂的正逆解。雅可比矩阵描述了机械臂末端执行器在关节空间和笛卡尔空间之间的变换关系,利用其求解方法可使机械臂具备良好的灵活性和精准度。
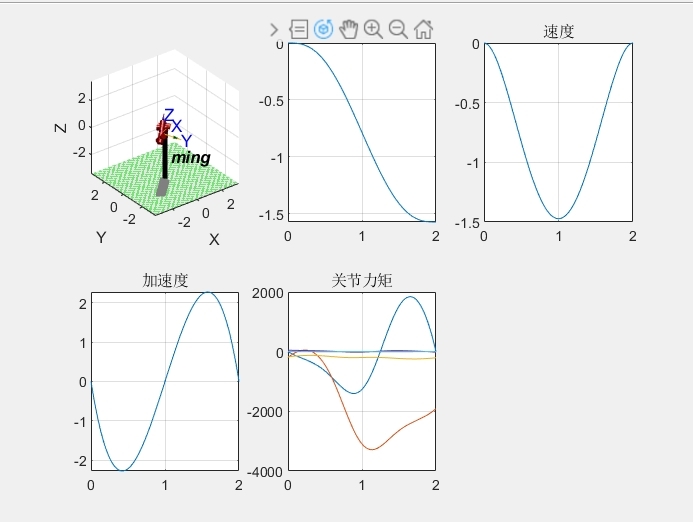
其次,动力学建模仿真是研究机械臂运动过程中各个关节之间相互作用的重要手段。通过建立机械臂的动力学模型,可以预测机械臂在特定工况下的运动轨迹和力学特性。在模型建立过程中,需要考虑机械臂的质量、惯量以及各个关节的摩擦和控制力等因素,以确保仿真结果的准确性和可靠性。动力学建模仿真技术的应用可以帮助开发者更好地理解和优化机械臂的运动性能,为机器人的控制算法提供有力支持。
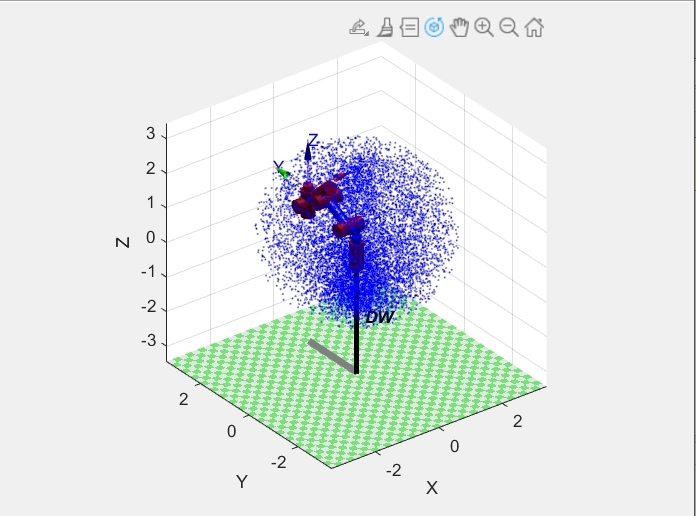
此外,轨迹规划技术在机械臂的自主操作中起着至关重要的作用。通过规划机械臂的运动轨迹,可以实现机械臂在特定工作空间内的精准定位和移动。在轨迹规划的过程中,蒙特卡洛采样是一种常用的方法,通过随机采样得到机械臂的各个关节角度,再根据规划算法进行优化,可以得到满足要求的机械臂运动轨迹。通过蒙特卡洛采样得到的末端执行器工作空间可以直观地展示出机械臂的可达性和工作范围。
最后,MATLAB程序提供了强大的开发平台,可以方便地进行机械臂建模仿真的开发与调试。通过控制面板的设计,用户可以直观地操作机械臂的运动,在仿真环境中实时观察机械臂的运动轨迹和工作空间。代码的流畅运行保证了仿真结果的准确性和实时性,为开发者提供了良好的开发体验。
综上所述,本文围绕六自由度机械臂的建模仿真展开讨论,介绍了机器人运动学正逆解、动力学建模仿真与轨迹规划的相关技术。雅可比矩阵求解、蒙特卡洛采样等方法在机械臂建模仿真中具有重要作用,而MATLAB程序提供了便捷的开发平台和流畅运行的代码。通过本文的介绍,读者可以更好地了解机械臂建模仿真的基本原理和应用方法,为机器人技术的研究和应用提供参考。
相关的代码,程序地址如下:http://matup.cn/680368606738.html
















 6972
6972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









