







爱招飞 IsoFace 移动端开发工具 PinToo 控制机械臂
通过PinToo 的ModbusTCP来控制虚拟场景中的机械臂的移动。实现对 Factory IO 场景的控制。
Factory IO是一款出色的虚拟仿真软件,可以自由使用其内部的各种元器件、传感器、驱动器等搭建自己理想中的工业现场,并联合PLC进行编程仿真。
范例目录中已提供了场景的项目文件,可直接在Factory IO 中打开。
在场景中选择驱动方式,点击菜单栏中的 文件-驱动,在下拉框中选择驱动的方式为 Modbus TCP/IP Server,点击右侧的 配置 按钮,将从站ID 修改为 255。
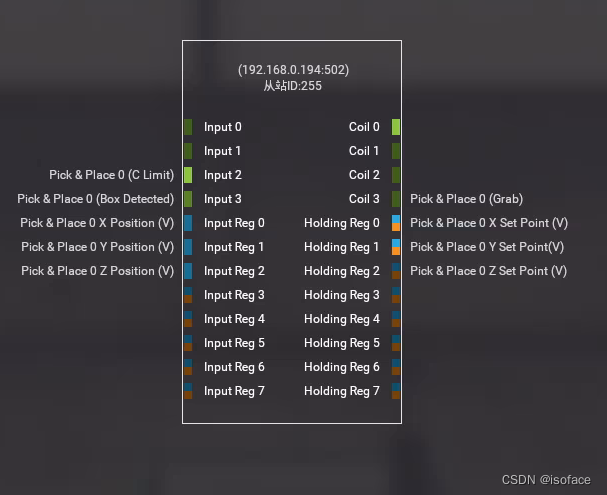

启动PinToo,在模块设计界面点击 导入数据库 ,将 PinToo_Arm.pdb 导入至模块设计界面列表中。进入至模块设计界面,确认 fxModbusTCP 中的 Host 属性已修改为虚拟场景软件指定的地址。
设计界面显示如下:
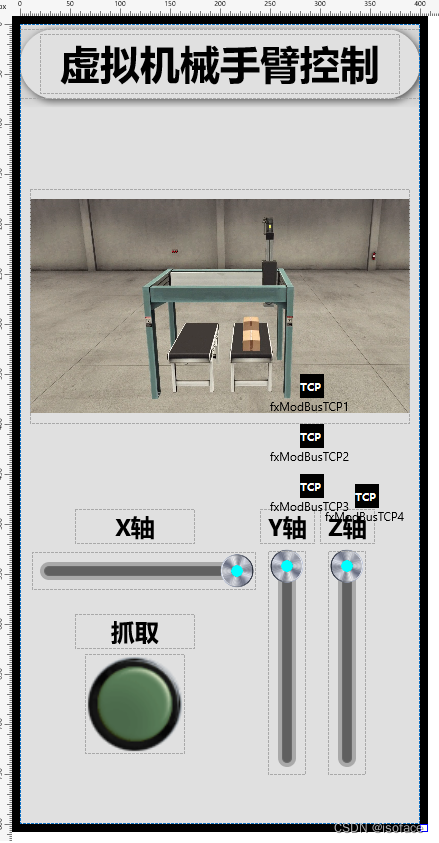
切换至发布中心,将模块发布至已连接的设备。运行场景与设备,查看控制的效果。

- PinToo 简介:https://www.isoface.cn/isoface/production/software/pintoo
- PinToo下载:点击此处下载
- PinToo产品说明:https://www.isoface.cn/isoface/doc/pintoo/main/
- PinToo 范例列表:https://www.isoface.cn/isoface/production/software/pintoo/pintoo-sample
- PinToo 快速上手:https://www.isoface.cn/isoface/study/quick-start/2022-05-28-03-08-29/pintoo
- PinToo 无需安装,在线试用:https://www.isoface.cn/isoface/support/trial/pintoo
相关代码:
const demo = false;
var
Detected,Grab: Boolean;
ZValue: Integer;
Procedure slideXOnChange(Sender: TObject);
Begin
if not demo Then
fxModbusTCP1.WriteRegister(1,slideX.Value);
End;
Procedure slideYOnChange(Sender: TObject);
Begin
if not demo Then
fxModbusTCP2.WriteRegister(2,slideY.Value);
End;
Procedure fxRunFrameAfterScriptRun(Sender: TObject);
var
v,w,z: word;
Begin
if demo Then
begin
fxSwitchButton1.HitTest := False;
exit;
End;
if fxModbusTCP1.ReadHoldingRegister(1,v) Then
slideX.Value := Round(v);
if fxModbusTCP2.ReadHoldingRegister(2,w) Then
slideY.Value := Round(w);
if fxModbusTCP3.ReadHoldingRegister(3,z) Then
begin
slideZ.Value := Round(z);
ZValue := Round(z);
End;
End;
Procedure slideZOnChange(Sender: TObject);
var
i: Integer
Begin
if (not demo) Then
begin
fxModbusTCP3.WriteRegister(3,slideZ.Value);
End;
End;
Procedure fxSwitchButton1OnSwitch(Sender: TObject);
Begin
Grab := fxSwitchButton1.IsChecked;
fxModbusTCP4.WriteCoil(4,Grab);
End;
Begin
End.















 7599
7599











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









