






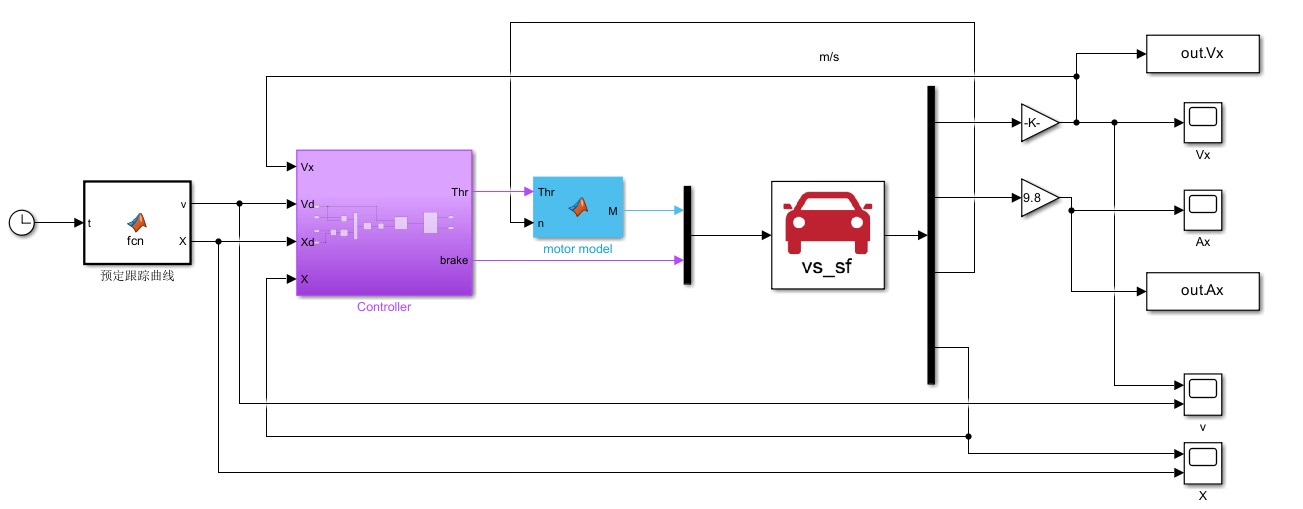
整车纵向控制,双PID控制实现纵向的速度和位置控制。
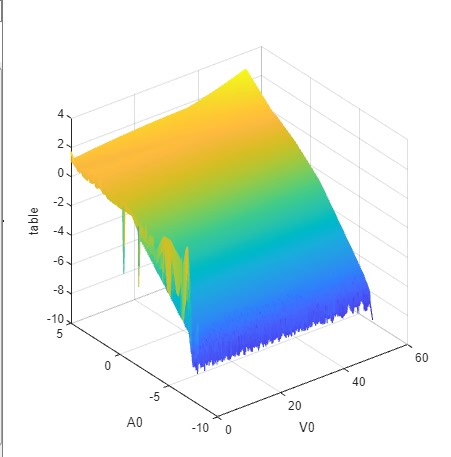
预先对整车的加速度与油门刹车踏板之间的标定,此后就可以通过双PID进行纵向的速度和位置控制,进行Simulink和Carsim联合仿真验证。
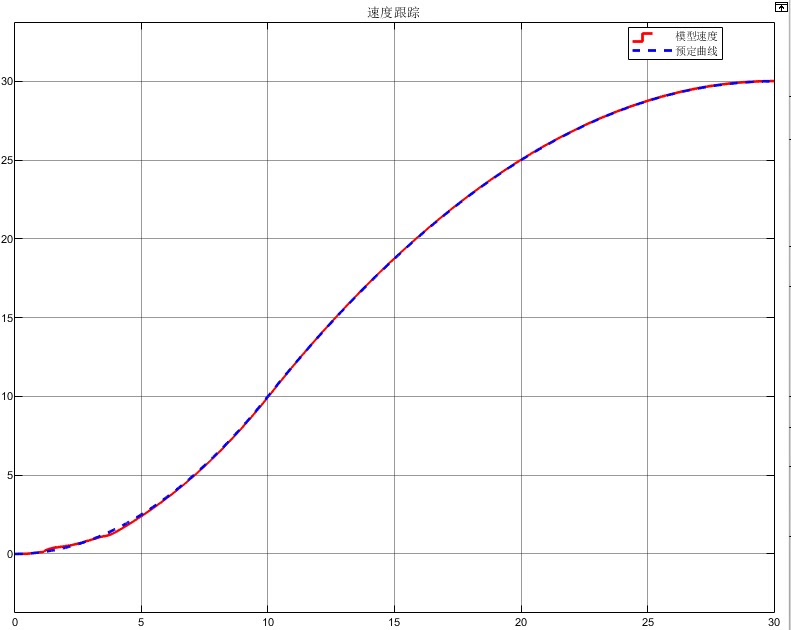
最后两张图为控制跟踪效果。
资料中有matlab代码,simulink模型和介绍资料(自制),介绍了整定的全部过程。
ID:9740723616340829
车辆小贾

整车纵向控制是一项重要的技术,在汽车工程领域具有广泛的应用。其中,双PID控制是实现整车纵向速度和位置控制的常用方法之一。本文将围绕整车纵向控制和双PID控制展开,介绍其原理、实现方法以及仿真验证。
整车纵向控制的目标是通过控制汽车的加速度和刹车踏板来实现速度和位置的控制。在进行控制之前,首先需要对整车的加速度和油门刹车踏板之间的关系进行标定。通过实验和数据处理,可以获得加速度和油门刹车踏板之间的线性关系,从而为后续的控制提供基础。
在获得标定数据之后,可以利用双PID控制算法来实现整车纵向的速度和位置控制。PID控制器是一种经典的控制算法,由比例项、积分项和微分项组成。通过不断调节这三个项的权重,可以实现对系统动态性能的调节。在整车纵向控制中,比例项用于根据误差大小调节控制输出,积分项用于消除系统稳态误差,微分项用于抑制系统的震荡。
为了验证整车纵向控制的性能,可以利用Simulink和Carsim进行联合仿真。Simulink是一款功能强大的仿真软件,可以方便地搭建控制系统模型并进行仿真。Carsim则是一款专门用于汽车动力学仿真的软件,可以模拟汽车在不同路况下的运动行为。通过将这两个软件联合起来,可以对整车纵向控制的效果进行全面的评估。
最后,为了直观地展示控制效果,本文提供了两张相关的控制跟踪效果图。这些图表展示了在不同控制条件下,整车纵向控制的性能表现。
综上所述,本文围绕整车纵向控制和双PID控制展开,介绍了其原理、实现方法以及仿真验证。通过合理的标定和调节PID参数,可以实现对汽车整车纵向速度和位置的精确控制。Simulink和Carsim的联合仿真验证可以全面评估整车纵向控制的性能。本文提供的matlab代码、Simulink模型和介绍资料将有助于读者深入了解整车纵向控制的实现过程。
(以上内容仅为示例,实际文章请根据要求进行修改和扩展)
【相关代码,程序地址】:http://fansik.cn/723616340829.html
















 4833
4833











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









