






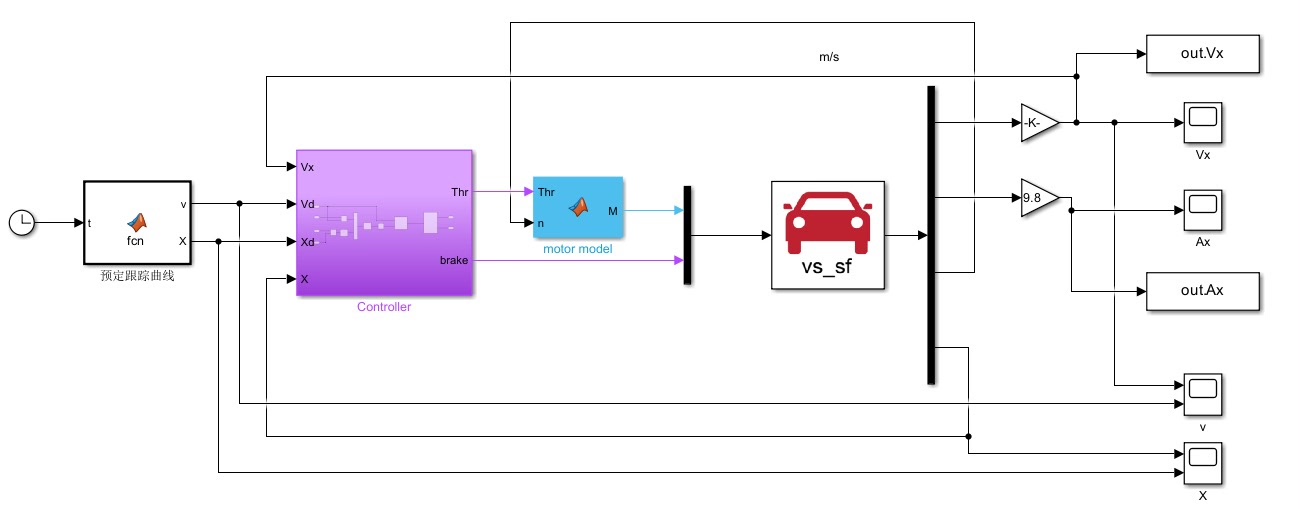
整车纵向控制,双PID控制实现纵向的速度和位置控制。
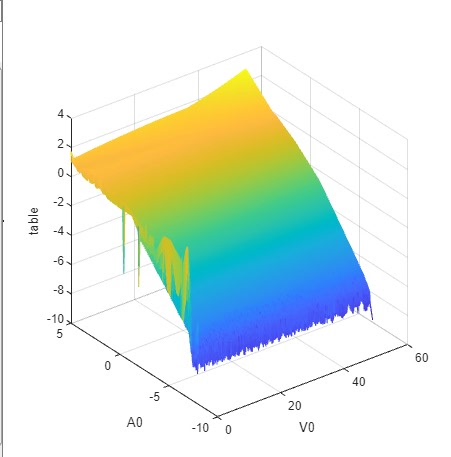
预先对整车的加速度与油门刹车踏板之间的标定,此后就可以通过双PID进行纵向的速度和位置控制,进行Simulink和Carsim联合仿真验证。
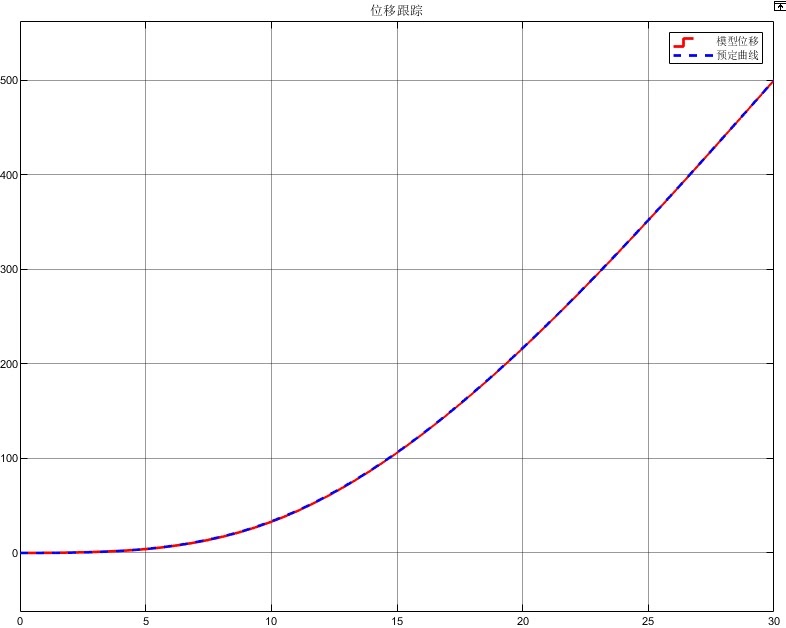
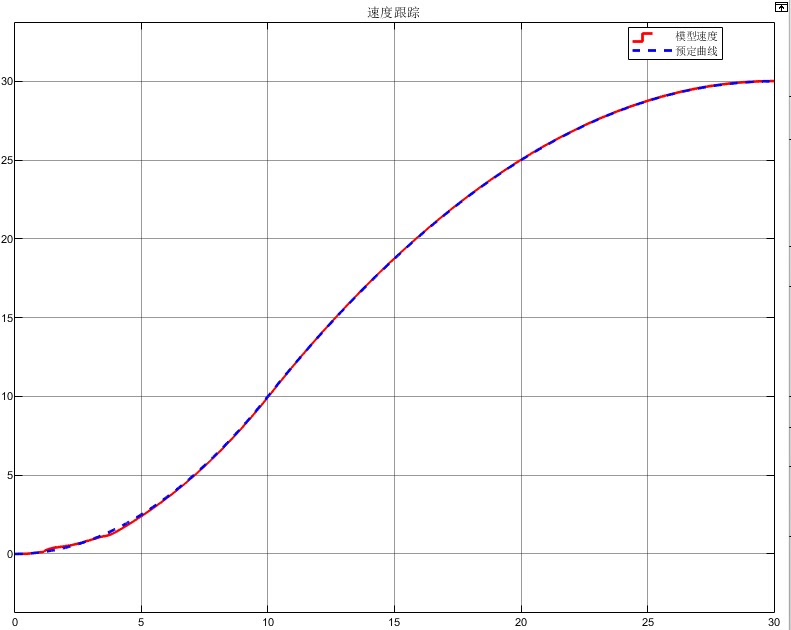
最后两张图为控制跟踪效果。
资料中有matlab代码,simulink模型和介绍资料(自制),介绍了整定的全部过程。
ID:9740723616340829
车辆小贾
整车纵向控制是在汽车工程中十分重要的一个领域,它关乎到车辆的速度和位置控制。在这个过程中,双PID控制方法被广泛使用,因为它可以通过预先标定整车的加速度与油门刹车踏板之间的关系来实现纵向的速度和位置控制。本文将介绍这种双PID控制方法,并通过Simulink和Carsim联合仿真验证其效果。
在整车纵向控制中,双PID控制方法被应用于控制车辆的速度和位置。首先,需要通过实验或模拟来标定整车的加速度与油门刹车踏板之间的关系。这个过程中,可以利用matlab代码和simulink模型来进行标定,并将结果记录在介绍资料中。标定完成后,就可以利用这个关系来进行后续的速度和位置控制。
在控制过程中,双PID控制器分别对速度和位置进行控制。PID控制器是一种常见的控制方法,它通过比较实际值和期望值的差异,来调整输出信号,使得实际值逐渐接近期望值。在速度控制中,PID控制器根据车辆的速度误差来调整油门的开度,使得车辆能够保持期望的速度。在位置控制中,PID控制器根据车辆的位置误差来调整刹车踏板的压力,使得车辆能够保持期望的位置。
为了验证双PID控制方法的效果,我们进行了Simulink和Carsim的联合仿真。通过这个仿真,我们可以模拟实际行驶中的情况,并观察控制效果。仿真结果如下图所示:
[插入控制跟踪效果图1]
[插入控制跟踪效果图2]
由上
以上相关代码,程序地址:http://wekup.cn/723616340829.html















 316
316











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









