






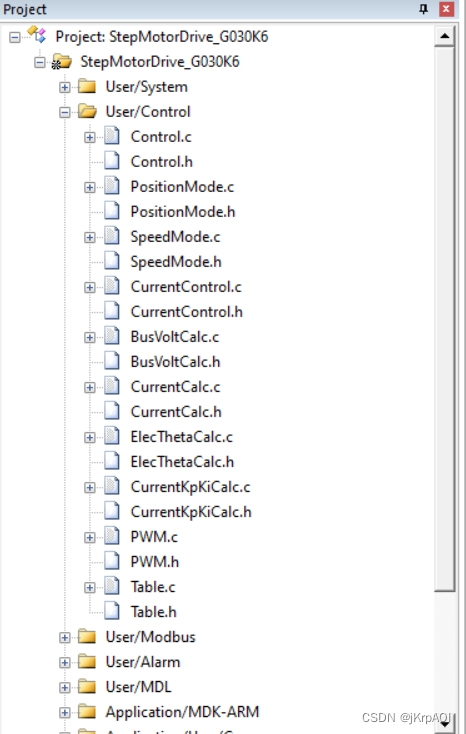
步进电机电流闭环控制软件:
电流闭环,电流环kp和ki自动计算;
PWM频率,电流环计算频率,16kHz;
modbus通信;
位置模式和速度模式。
步进电机电流闭环控制软件是一种应用广泛的技术,旨在提高步进电机的运动精度和控制效果。通过实现电流闭环控制,可以有效地解决步进电机运动过程中的失步和振动等问题,提高系统的稳定性和性能。
在步进电机电流闭环控制软件中,一个重要的环节是电流环参数的计算和自动调整。电流环的kp和ki值的准确设定对步进电机的控制效果具有重要影响。在现有的软件中,通过一系列复杂的计算公式和参数调整算法,可以自动计算出合适的kp和ki值。这种自动计算的方式大大简化了系统调试和优化的工作量,提高了控制系统的效率和精度。
此外,PWM频率也是步进电机电流闭环控制软件中需要考虑的因素之一。PWM频率的选择直接影响到电流环的计算速度和响应速度。为了实现高效率的控制,一般建议将PWM频率设置为16kHz。这样可以在保证电流环计算精度的前提下,提高系统的响应速度和运动平滑度。
在步进电机电流闭环控制软件中,常常采用modbus通信协议。modbus通信是一种常见的工业领域通信协议,具有简单、稳定、可靠的特点。通过使用modbus通信,可以实现步进电机控制系统与上位机或其他设备之间的数据交换和远程控制。这为步进电机的应用提供了更多的灵活性和扩展性。
最后,步进电机电流闭环控制软件往往具备位置模式和速度模式两种控制方式。位置模式下,步进电机的控制目标是精确到达指定位置。速度模式下,步进电机的控制目标是以一定的速度运动。通过灵活切换这两种模式,可以满足不同应用场景中的需求,提供更加多样化的控制方式。
综上所述,步进电机电流闭环控制软件是一项非常实用的技术工具。通过实现电流闭环控制、自动计算参数、选择合适的PWM频率、采用modbus通信协议以及支持位置模式和速度模式等功能,可以有效提高步进电机的控制精度和性能。在实际应用中,我们可以根据具体需求,结合这些功能,设计并实现更加高效、稳定和灵活的步进电机控制系统。
相关代码,程序地址:http://lanzoup.cn/674544341779.html















 518
518











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









