






Simulink仿真:基于模型预测的自适应巡航控制系(ACC)建模
参考文献:无
仿真平台:MATLAB/Simulink
主要内容:ACC系统有两种工作模式:速度控制,汽车以驾驶员设定的速度行驶;间距控制,主车辆与目标车辆之间保持安全距离。
ID:71100711255963899
Fuzzy
在汽车行驶领域,自适应巡航控制系统(ACC)是一项非常重要的技术。ACC系统能够根据车辆行驶环境及驾驶员的需求,实现自动控制车辆的速度和间距,从而提高行驶的安全性和舒适性。在ACC系统中,模型预测是一种常用的方法,能够对车辆的行驶状态进行预测,并根据预测结果进行控制决策。
在本文中,我们将基于MATLAB的Simulink仿真平台,对基于模型预测的自适应巡航控制系统进行建模和仿真分析。ACC系统主要有两种工作模式:速度控制模式和间距控制模式。在速度控制模式下,驾驶员设定一个目标速度,ACC系统会根据车辆当前的速度和行驶环境,自动控制车辆的油门力度,使车辆行驶速度与目标速度保持一致。而在间距控制模式下,ACC系统会根据主车辆与目标车辆之间的距离,自动控制车辆的减速和加速,保持与目标车辆的安全距离。
ACC系统的核心是模型预测控制算法。模型预测控制算法主要是通过建立车辆动力学模型和行驶环境模型,对车辆的未来行驶状态进行预测,并根据预测结果进行控制决策。在本文中,我们将使用MATLAB的Simulink仿真平台,建立车辆动力学模型和行驶环境模型,并结合控制算法,实现模型预测控制。
首先,我们需要建立车辆动力学模型。车辆动力学模型是描述车辆运动过程的数学模型,通常包括车辆质心运动方程、车辆横向运动方程和车辆纵向运动方程等。在本文中,我们将简化车辆动力学模型,只考虑车辆纵向运动,并假设车辆的加速度和减速度具有一定的限制。
接下来,我们需要建立行驶环境模型。行驶环境模型是描述车辆行驶环境的数学模型,通常包括主车辆和目标车辆之间的相对位置关系、目标车辆的速度等信息。在本文中,我们将假设行驶环境为直线道路,主车辆和目标车辆之间的相对位置关系可以通过车辆间的距离来描述。
在模型预测控制算法中,我们首先需要对车辆的未来行驶状态进行预测。通过建立车辆动力学模型和行驶环境模型,我们可以得到车辆的当前状态和控制输入,从而预测出车辆未来的状态。然后,我们根据预测结果进行控制决策,确定主车辆的加速度和减速度。根据目标车辆与主车辆之间的距离和速度差,主车辆可以选择加速或减速,以保持与目标车辆的安全距离。
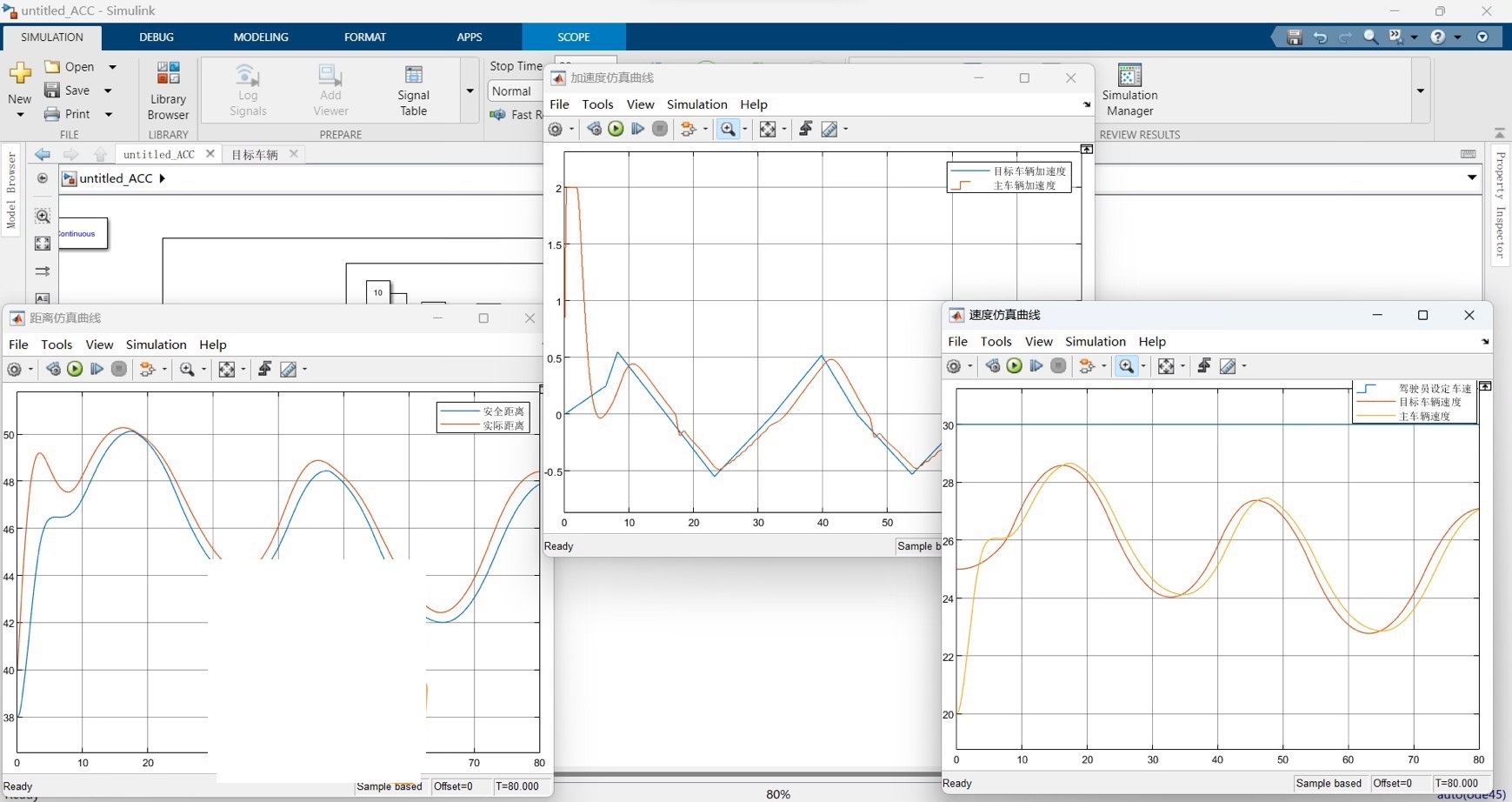
最后,我们使用MATLAB的Simulink仿真平台,对基于模型预测的自适应巡航控制系统进行仿真分析。在仿真实验中,我们将设置不同的驾驶员设定速度和目标车辆的速度,观察ACC系统的控制效果,并分析不同参数对系统性能的影响。
综上所述,本文基于MATLAB的Simulink仿真平台,对基于模型预测的自适应巡航控制系统进行了建模和仿真分析。ACC系统的速度控制和间距控制模式可以根据驾驶员的需求进行切换,并通过模型预测控制算法实现对车辆速度和间距的自动控制。通过仿真实验,我们可以评估ACC系统的控制效果,并分析不同参数对系统性能的影响,从而为实际应用提供参考和指导。
关键词:Simulink仿真、模型预测、自适应巡航控制系统、速度控制、间距控制、车辆动力学模型、行驶环境模型、控制决策、仿真分析、系统性能评估。
【相关代码,程序地址】:http://fansik.cn/711255963899.html
















 1121
1121

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









