






MATLAB四旋翼自适应控制仿真simulink simscape,可更换成自己的无人机solidworks模型 有公式手册需MATLAB2017版本以上
YID:7339666940697446
爱小马的海盐大傻


MATLAB四旋翼自适应控制仿真simulink simscape,可更换成自己的无人机solidworks模型 有公式手册需MATLAB2017版本以上
在现代无人机技术高速发展的当今,四旋翼无人机作为一种重要的无人机类型,被广泛应用于军事侦查、安保监控、航拍摄影等领域。然而,四旋翼无人机的自适应控制问题一直以来都备受关注。针对四旋翼无人机的自适应控制问题,本文提出了一种基于MATLAB的仿真平台,主要包括使用simulink进行仿真建模和使用simscape进行仿真分析。同时,本文还提供了可供用户进行个性化定制的solidworks模型,并介绍了相应的公式手册。该平台要求使用MATLAB的2017版本以上。
首先,我们需要明确自适应控制的概念。自适应控制是指系统能够根据外界环境的变化以及内部变化自动调整控制参数或者控制结构,以达到更好的控制效果。在四旋翼无人机应用中,自适应控制可以使无人机更好地适应不同的飞行环境,提高控制的精确性和稳定性。
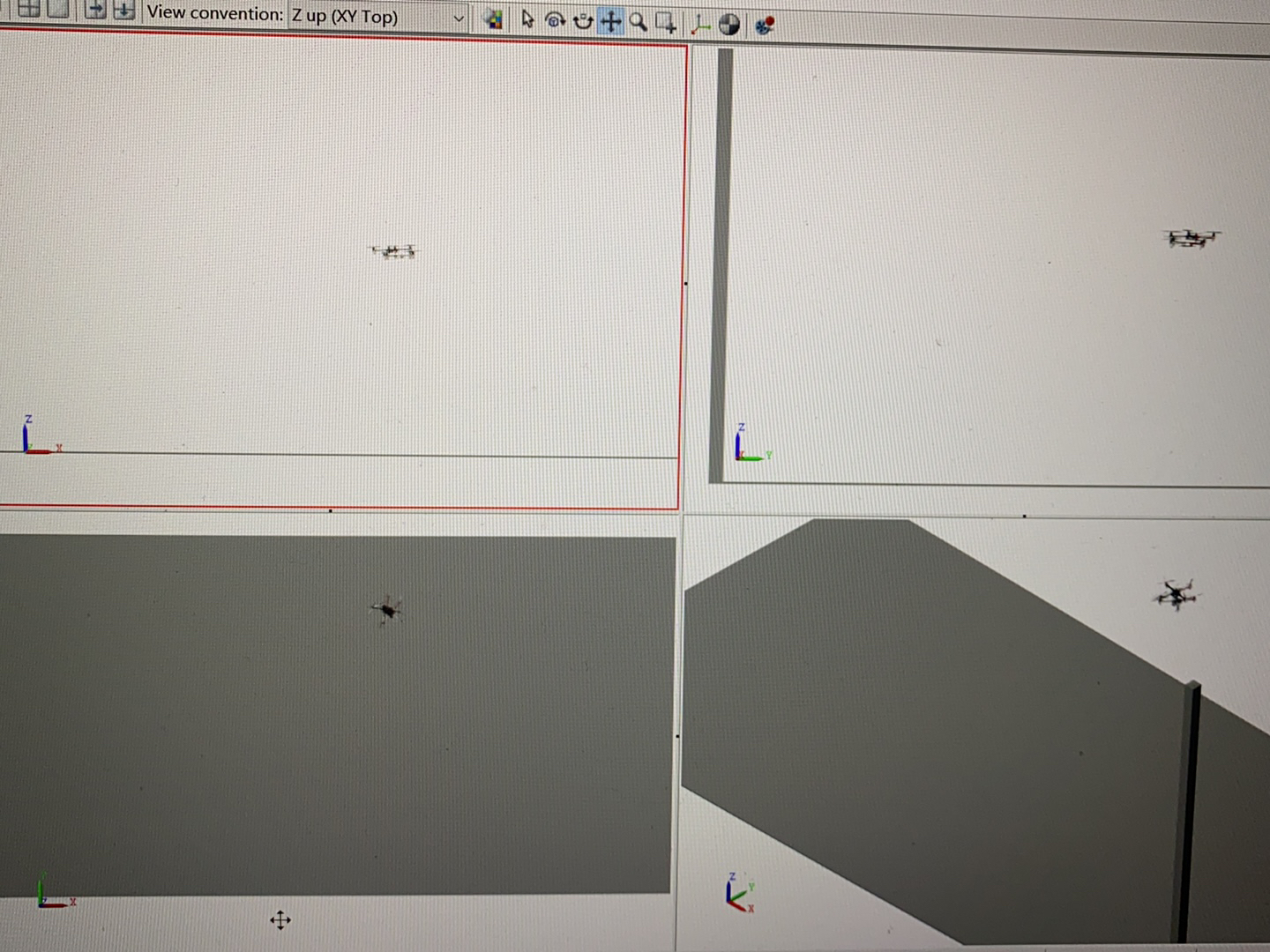
为了实现四旋翼无人机的自适应控制,我们选择使用MATLAB提供的强大工具进行仿真分析。MATLAB中的simulink是一种基于图形化建模的仿真平台,可以实现系统的动态仿真分析。simscape则是MATLAB中的一种物理建模工具,可以用于建立系统的物理模型,并通过仿真分析系统的性能。
在本文提出的仿真平台中,用户可以根据自己的需求进行个性化定制。具体而言,用户可以使用solidworks软件创建自己的无人机模型,并通过转换工具将模型导入MATLAB中。这样,用户就可以在仿真平台中使用自己的无人机模型进行仿真分析。这种个性化定制的设计使得仿真结果更加贴合实际应用场景,提高仿真分析的准确性。
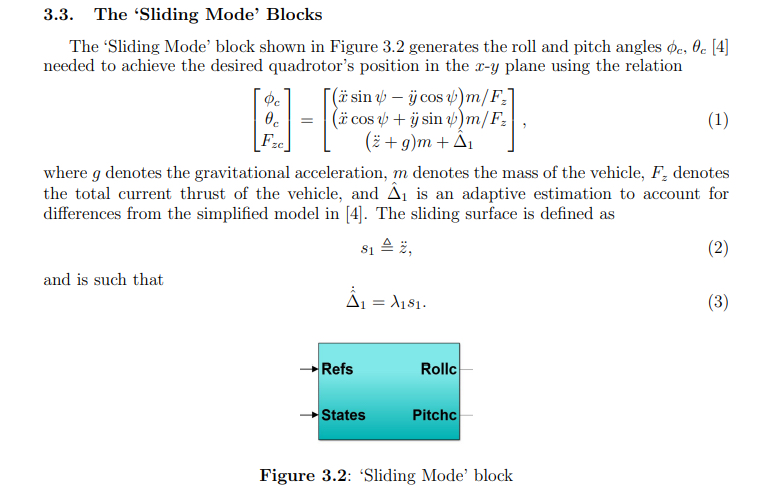
同时,本文还提供了一本公式手册,其中详细介绍了四旋翼无人机的相关公式和数学模型。这些公式和模型是进行仿真分析所必需的基础知识,可以帮助用户更好地理解仿真过程和结果。公式手册中的内容包括无人机的运动方程、控制算法和参数调节等方面,为用户提供了丰富的参考资料。
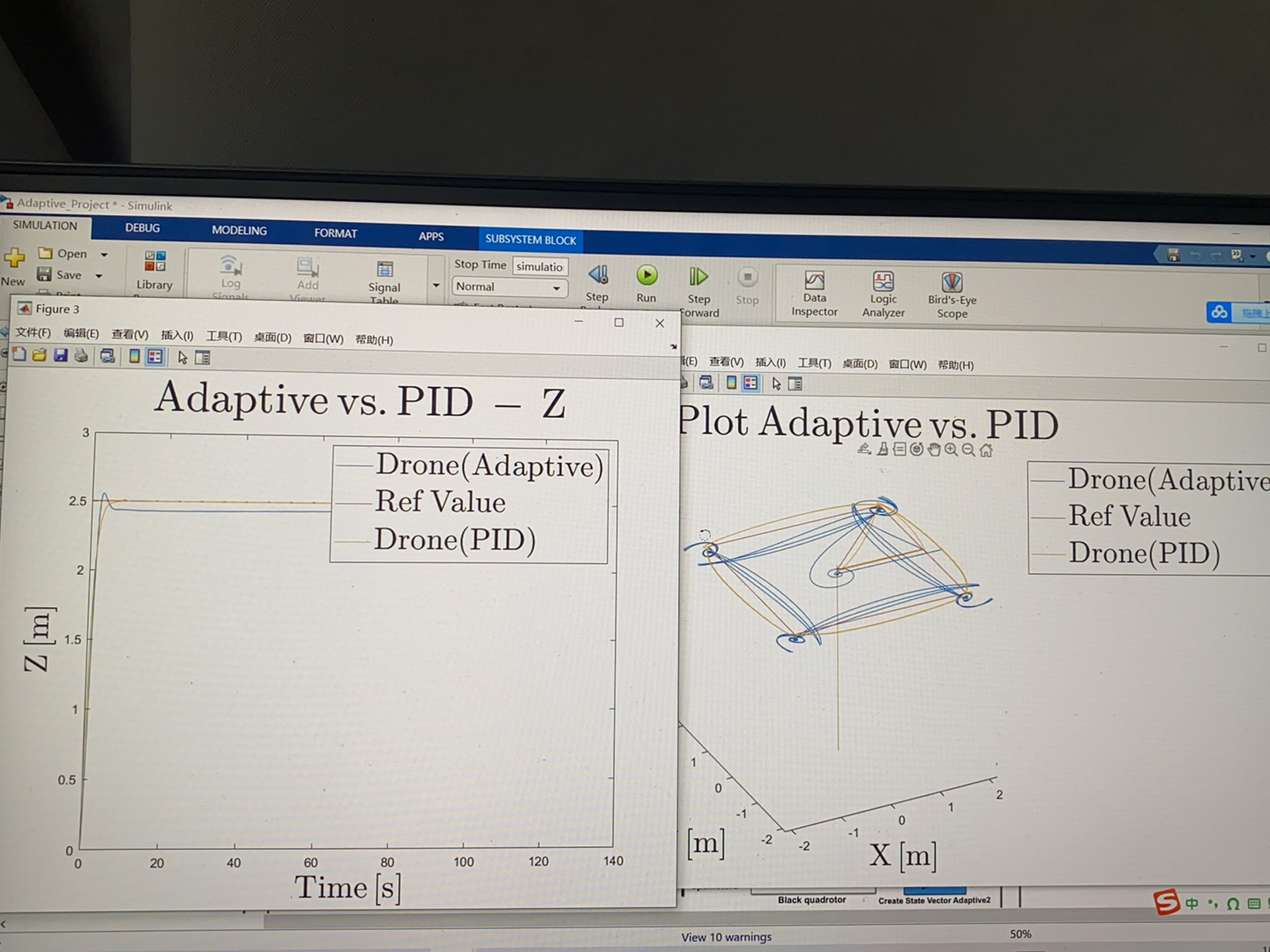
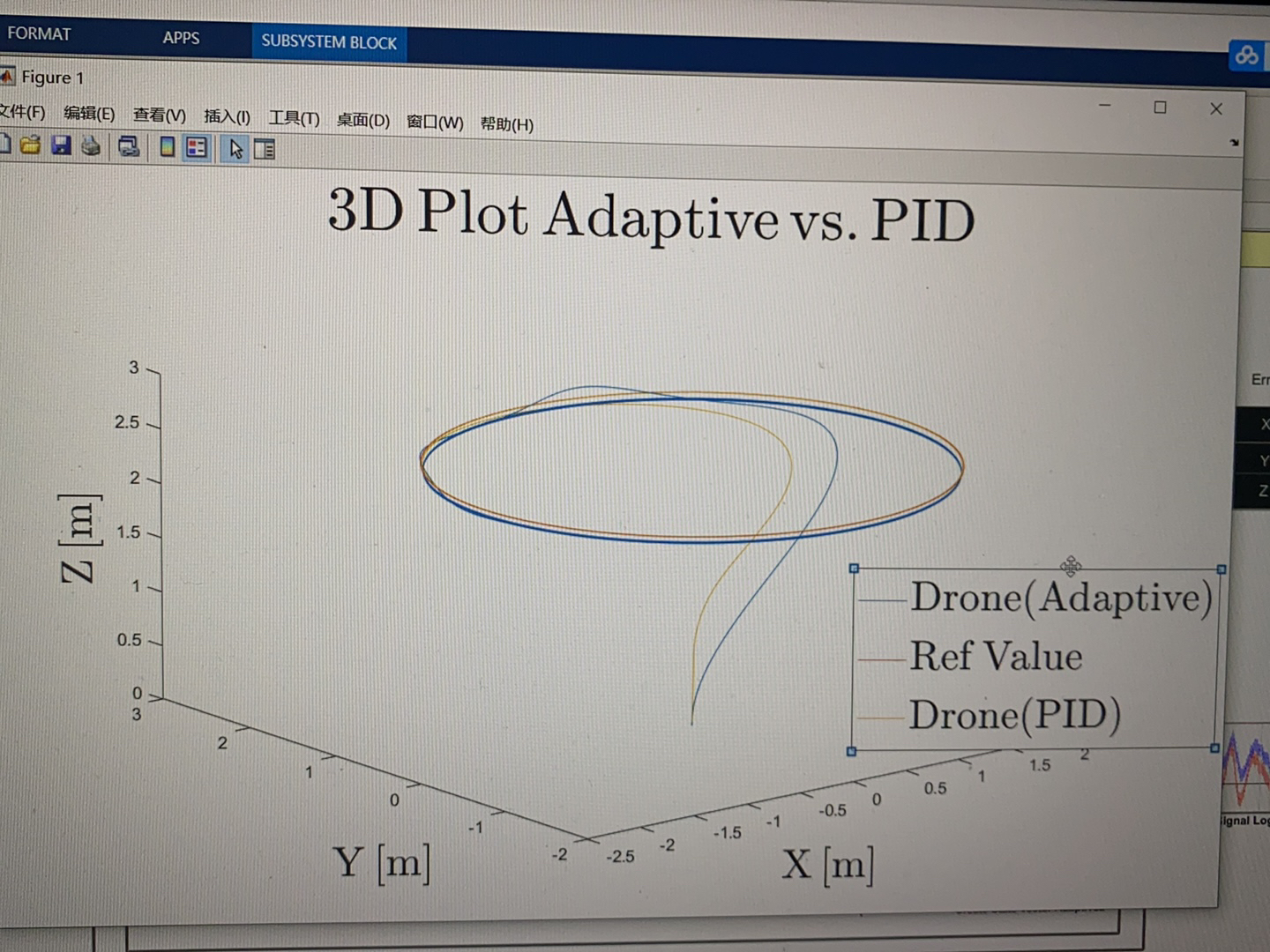
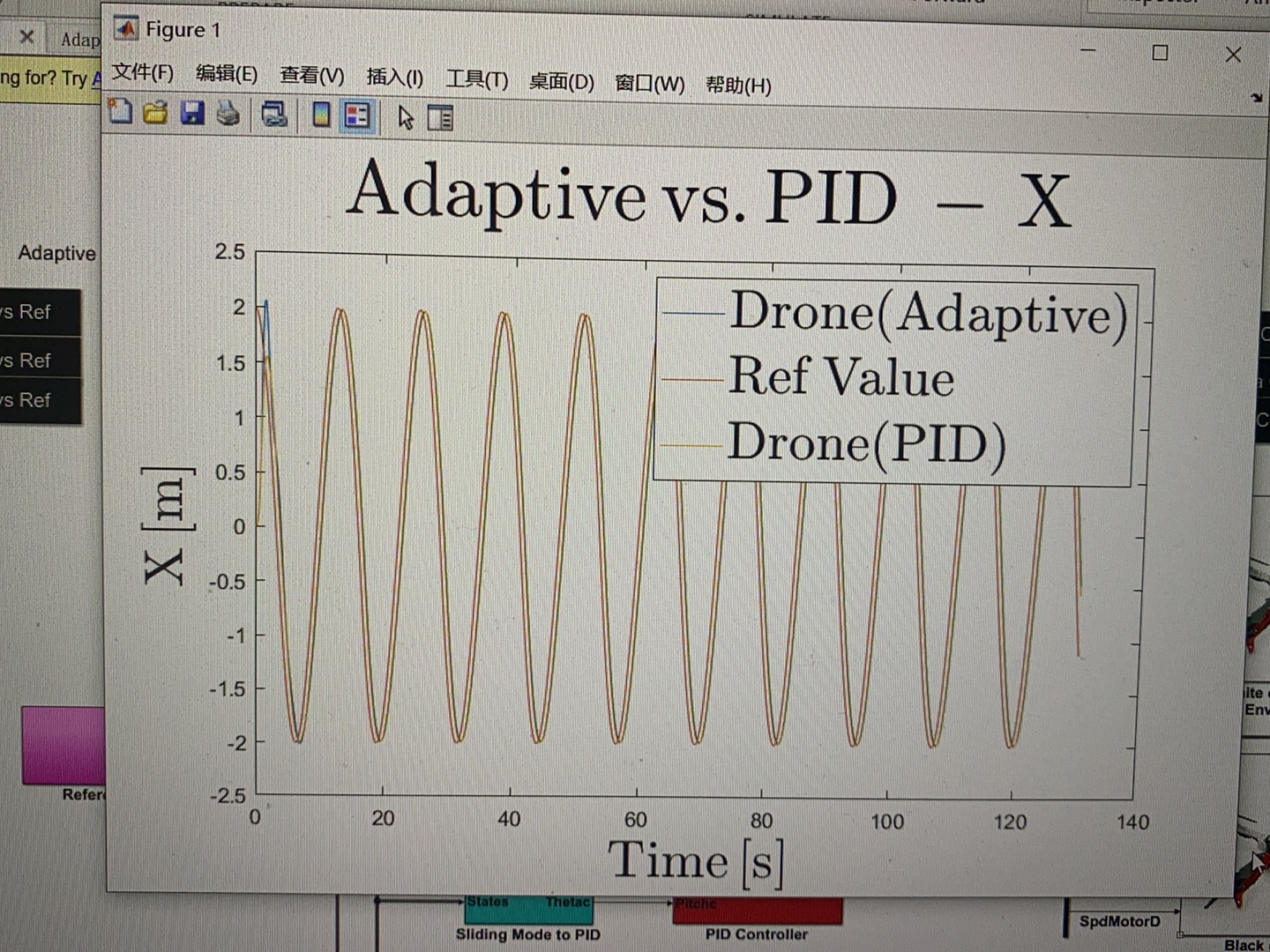
综上所述,本文提出了一种基于MATLAB的仿真平台,用于四旋翼无人机的自适应控制仿真分析。通过simulink和simscape工具的使用,用户可以进行系统的动态仿真分析,以评估和改进控制算法的性能。同时,用户还可以根据自己的需求进行个性化定制,使用自己的无人机模型进行仿真分析。本文还提供了相应的公式手册,为用户提供了丰富的参考资料。这一仿真平台将为无人机技术的研究和应用提供有力支持,促进无人机技术的进一步发展。
以上相关代码,程序地址:http://wekup.cn/666940697446.html















 754
754











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









