







搭建速度环位置环双闭环FOC控制模型,后续考虑在这个模型上实现滑膜观测器,实现无感FOC模型。
一、PMSM电机反电动势电路
拖入PMSM电机模型,设置好相关电机参数
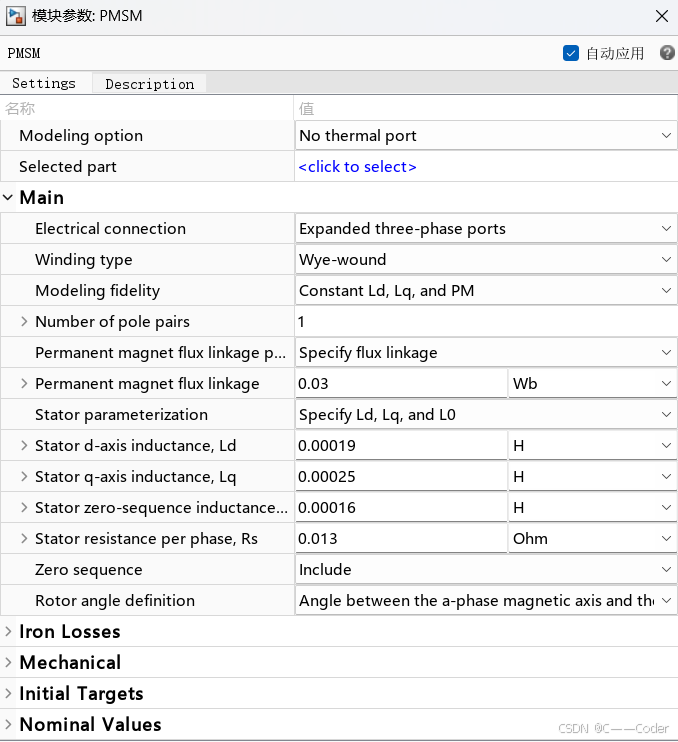
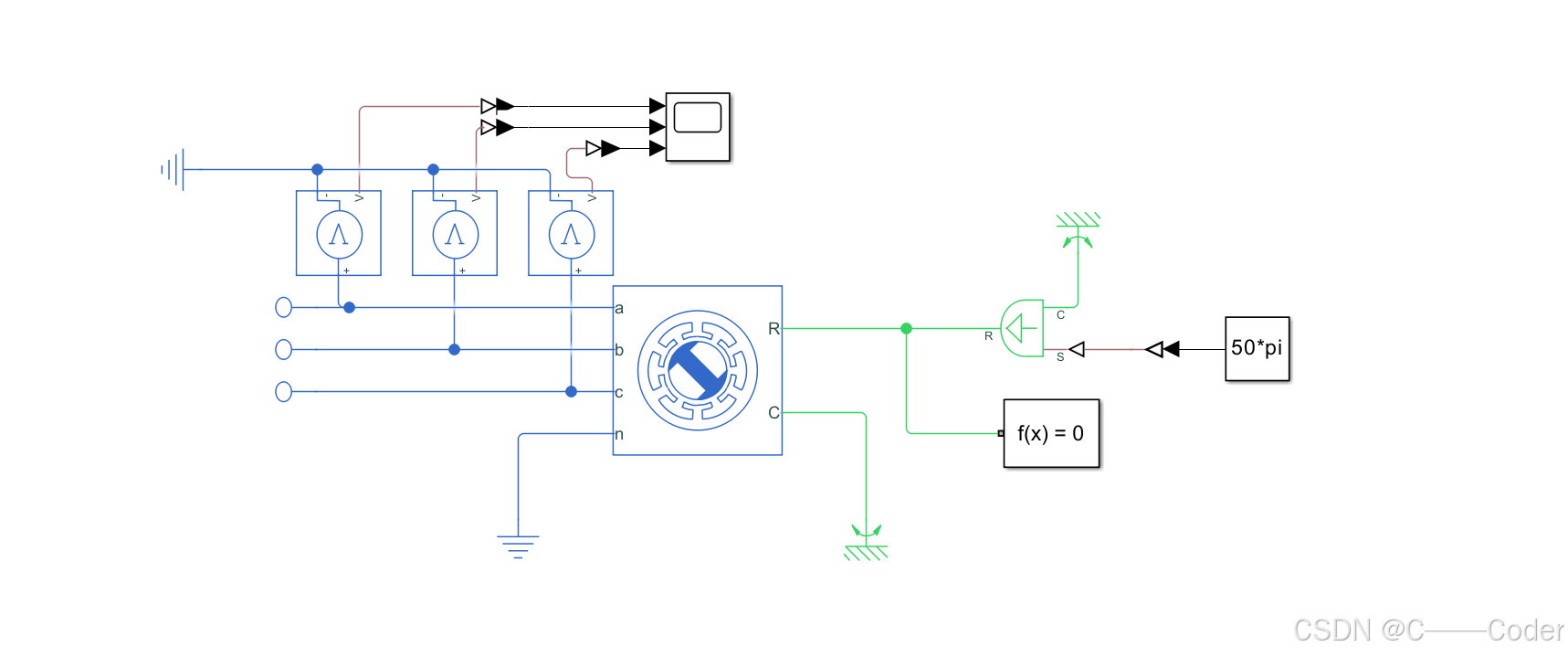
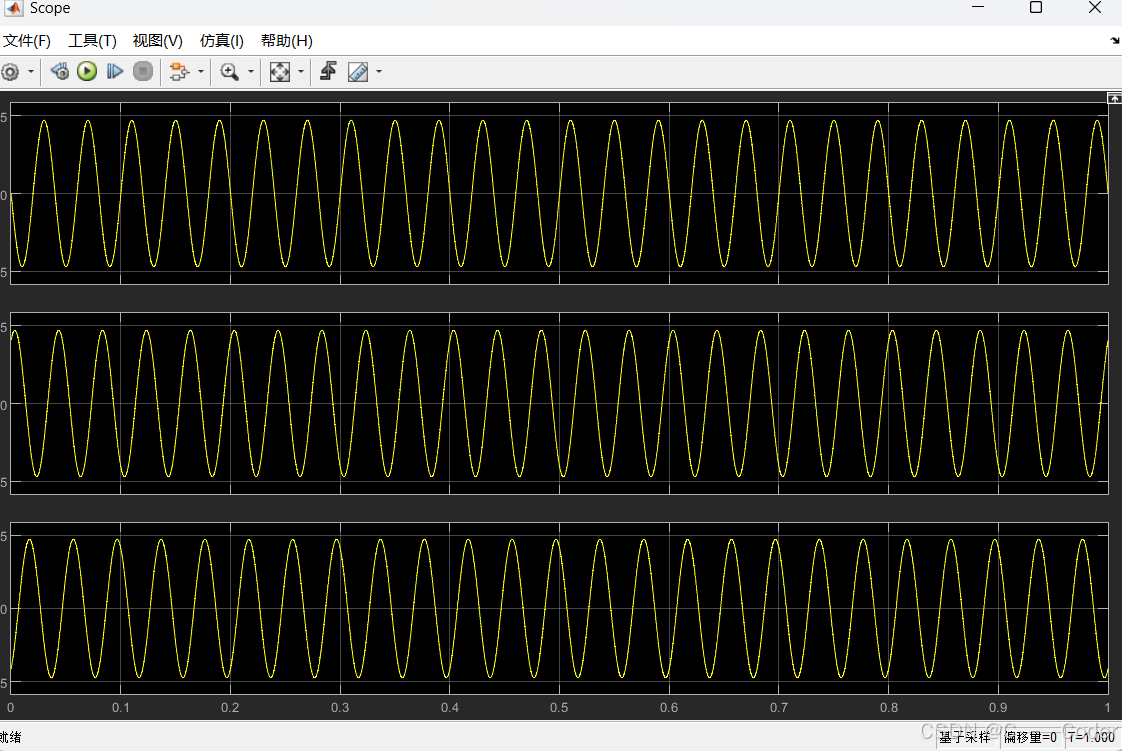
将电机三相悬空接入到Open Port,加入求解器和理想速度源,给定合适的转速。这时,电机就可以被外部拖动,成为发电机,然后利用电压采样模块采集三相的电压即可得到PMSM的三相反电动势波形。
仿真结果
二、有感FOC控制模型建立
这里的电机角度和转速使用的是Simulink的Rotational Motion Sensor仿真得到的,实际工程应用主要是编码器或者是霍尔信号,但这两个信号最开始推荐先找零度位置。电流采样就是单电阻、双电阻或者三电阻采样。
1、搭建PMSM驱动电路和采样电路
加入PMSM电机,驱动电路部分用Converter(ThreePhase)模块,这个模块内部实现就是三相六臂逆变电路,然后接入相电流和相电压采样模块。加入一个惯性模块模拟外部负载,加入Rotational Motion
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 92
92

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









