







整个文章很长,还请大家耐心看完,我会从Simulink控制参数和仿真建模全部截图展示出来,保证通过这个建模可以理解有感BLDC的控制原理。建议先去补充simulink的一些基础操作支持
一、BLDC反电动势建模分析
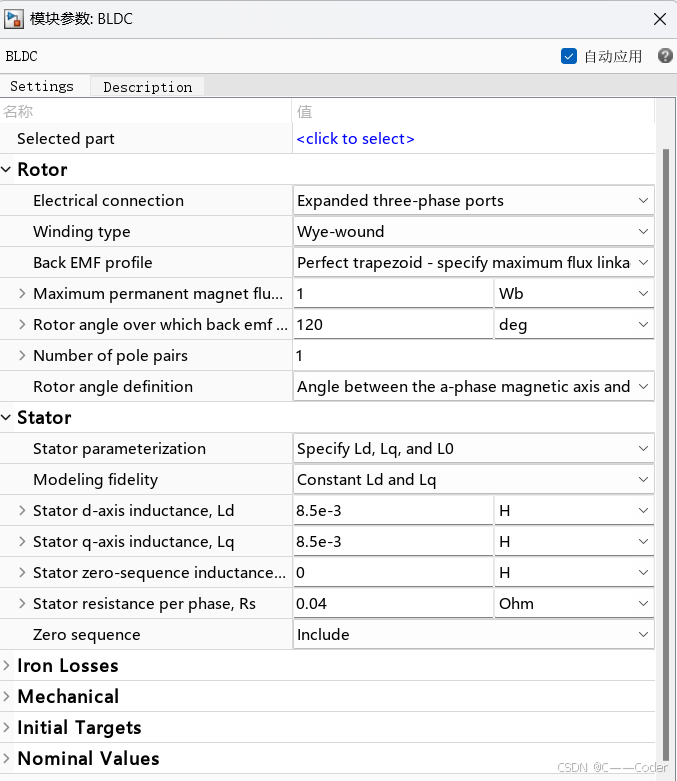
从simscape中找到BLDC,并拖进到Simulink的画布中,同时按如下设置好参数,下图是设置好参数的样子
设置几个outcircuit端口作为开路,连接到BLDC模块的a、b、c三个端口,n接入Electrical Reference(电气地参考),C接入Mechanical Rotational Reference(机械旋转参考)。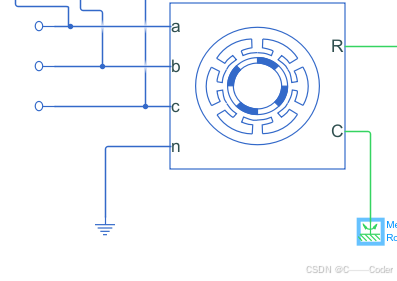
拖入Ideal Angular Velocity Source作为外部的速度源,同时引入求解器(
SolverConfiguration
),和目标角速度,按下图连接好。记住角速度接入时需要Simulink-PS Converter模块。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 22
22

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









