







 本文详细介绍了机器人开发的三个主要方面:硬件、操作系统和基础软件、软件和算法,包括SLAM、机器视觉、路径规划和导航、避障技术。机器人硬件涉及控制器、减速器、伺服电机和传感器;操作系统常采用ROS;软件层面则依赖于精确的算法来实现对外界环境的感知和控制。SLAM技术用于定位和建图,机器视觉用于目标识别,路径规划和导航确保机器人安全移动,避障技术则帮助机器人避开障碍物。
本文详细介绍了机器人开发的三个主要方面:硬件、操作系统和基础软件、软件和算法,包括SLAM、机器视觉、路径规划和导航、避障技术。机器人硬件涉及控制器、减速器、伺服电机和传感器;操作系统常采用ROS;软件层面则依赖于精确的算法来实现对外界环境的感知和控制。SLAM技术用于定位和建图,机器视觉用于目标识别,路径规划和导航确保机器人安全移动,避障技术则帮助机器人避开障碍物。
按照应用行业划分,机器人可分为工业机器人和服务机器人。工业机器人主要应用在工业领域,例如汽车制造和3C等行业应用较多。当前工业机器人主要是六轴机械臂,通过编程算法控制机械臂灵活精准运转。服务机器人主要应用在服务行业,例如炒菜机器人、手术机器人等。
如果按照是否移动划分,则机器人分为固定机器人和移动机器人。固定机器人一般不能自主移动,固定在一个位置,主要功能要完成控制机械臂的运动。而移动机器人还需要控制底盘、车轮或四足、飞行翼。因为要移动外界环境就会变化,所以移动机器人会运行在一个变化的环境中,这时识别周围环境就很重要,就需要通过SLAM+GPS技术进行同步定位和建图以及导航。
如果要开发机器人,就要选择好自己机器人所处于的应用行业,每个应用行业决定了机器人的动作控制不一样,例如炒菜机器人和医疗手术机器人就相差很大,有不同的动作控制算法。而如果机器人要移动,例如送货机器人,那么要考虑环境的识别。
机器人从实现上说明如下:
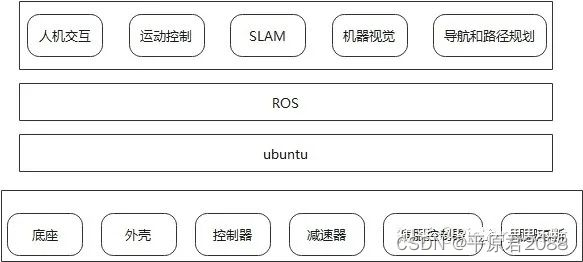
1、硬件
- 机器人底层硬件包括:底座、外壳、控制器、减速器、伺服控制器、伺服电机等。
- 控制器主要控制各种动作,例如机械臂的旋转和夹取等操作,无人机旋翼的转速控制。一般机器人厂家都会开发自己的一套控制器。控制板可以自己设计,也可采用树莓派进行二次开发。
- 减速器目的是降低转速,增加转矩&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 563
563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









