






文章目录
· 相位法测角原理与公式推导
· 振幅法测角原理(最大信号法、等信号法(比幅法与和差法))
· 单脉冲测角方法(振幅和差法、比相法、相位和差法)
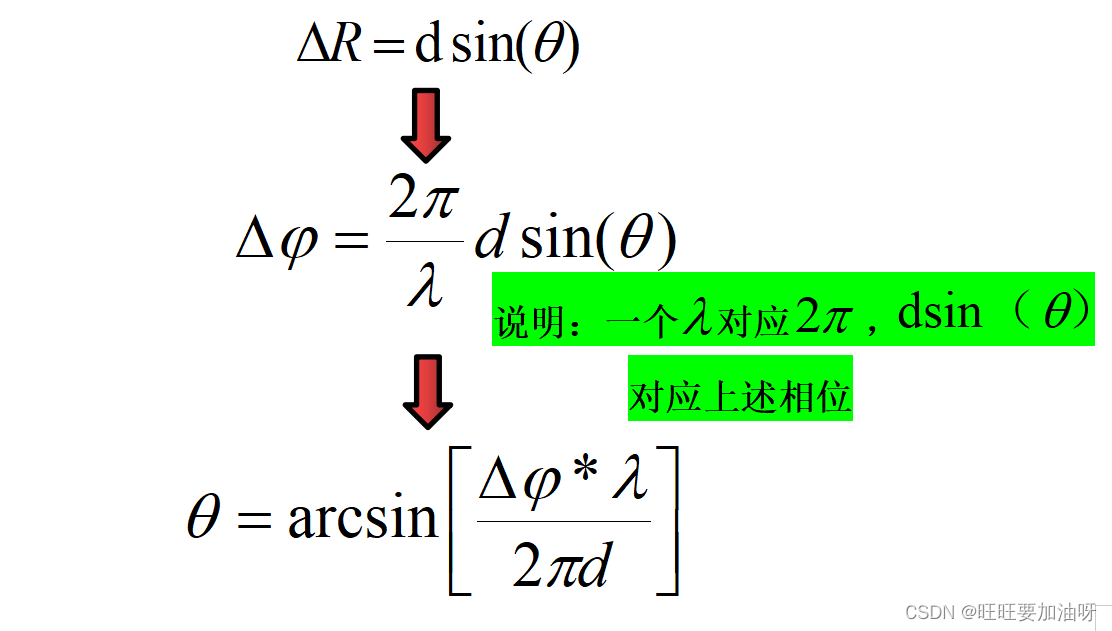
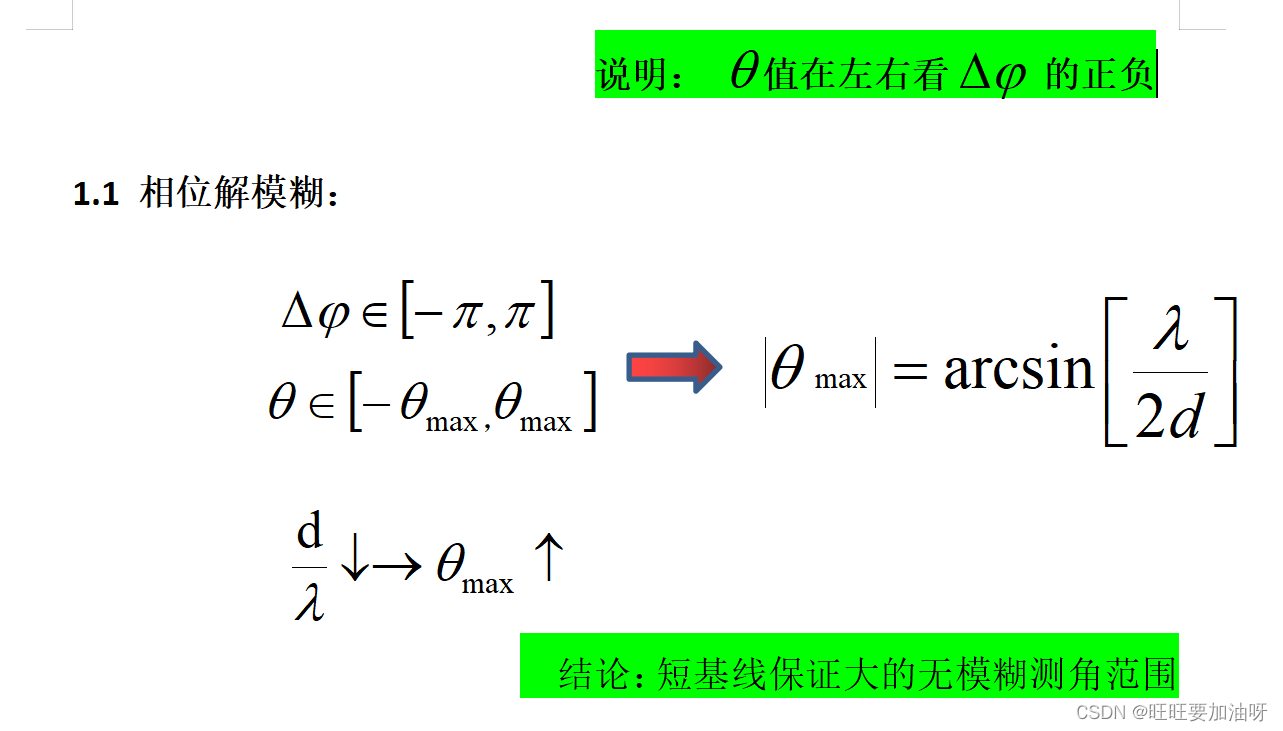
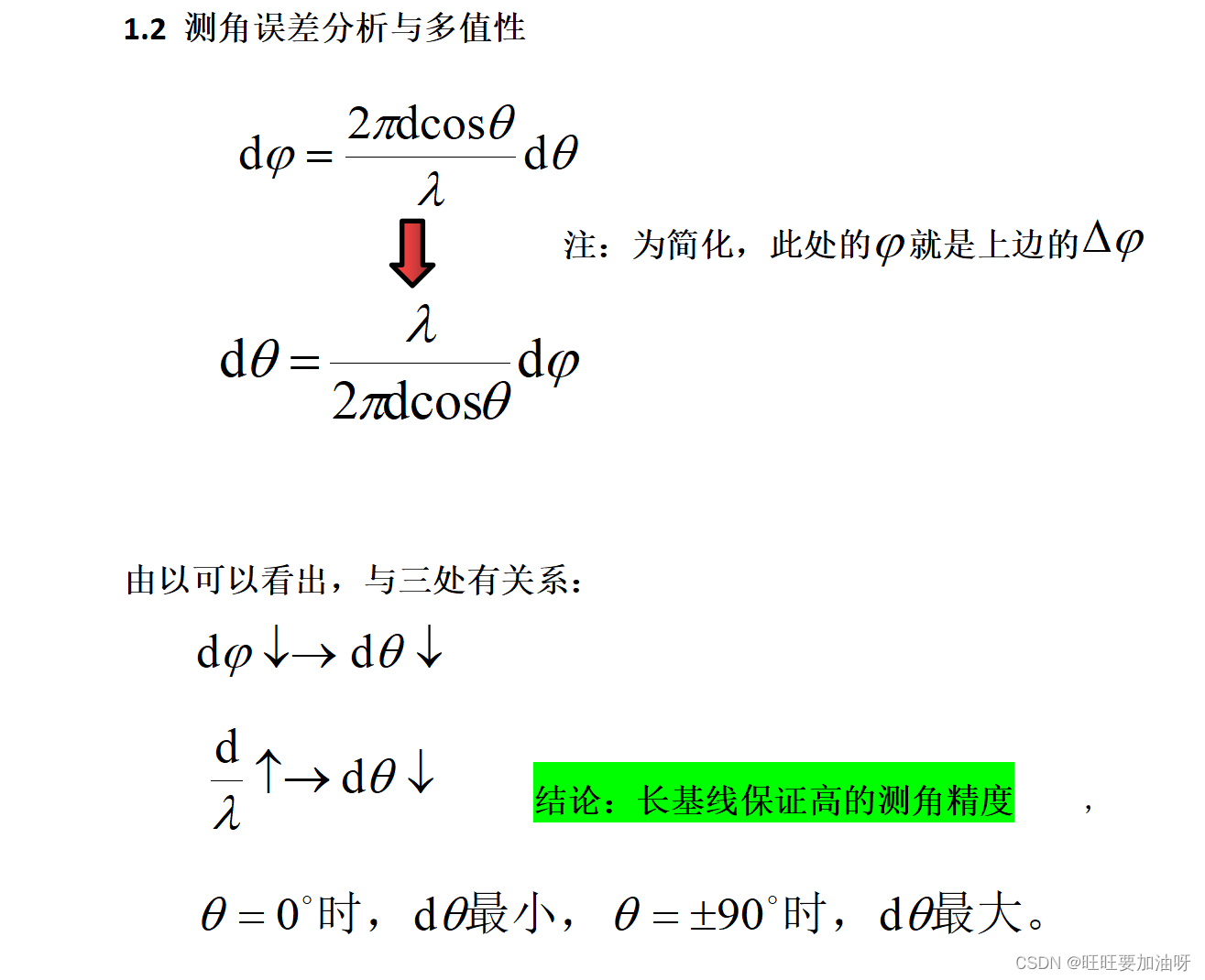
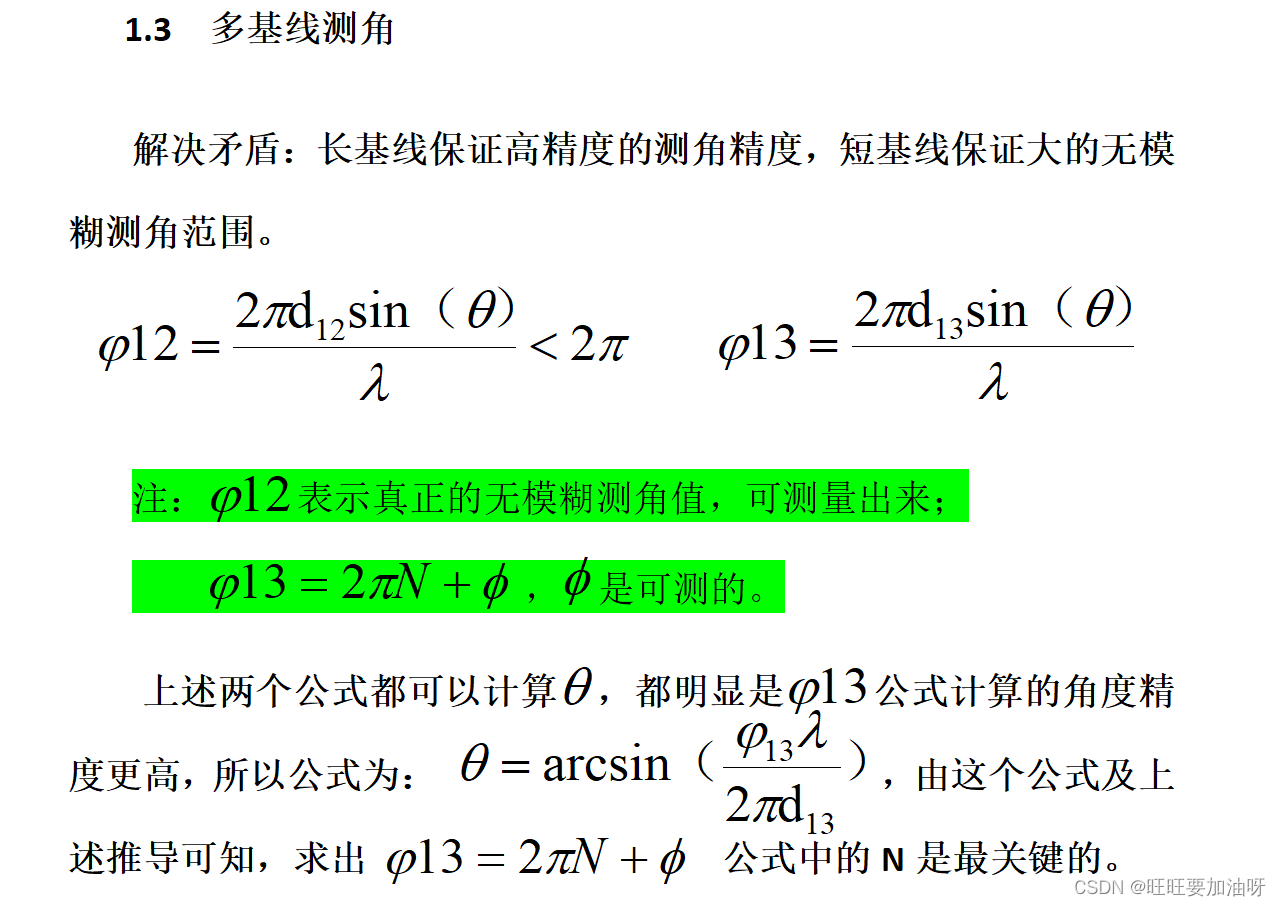
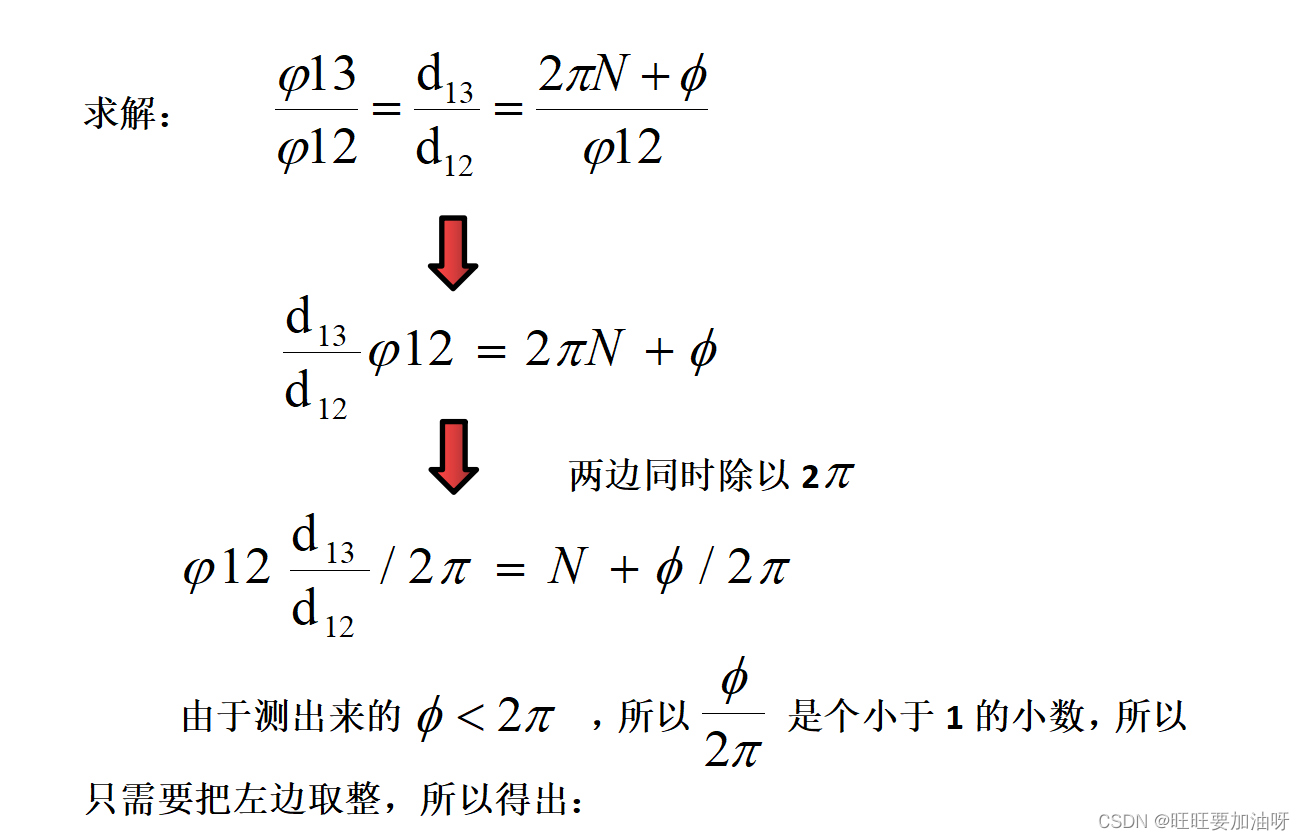
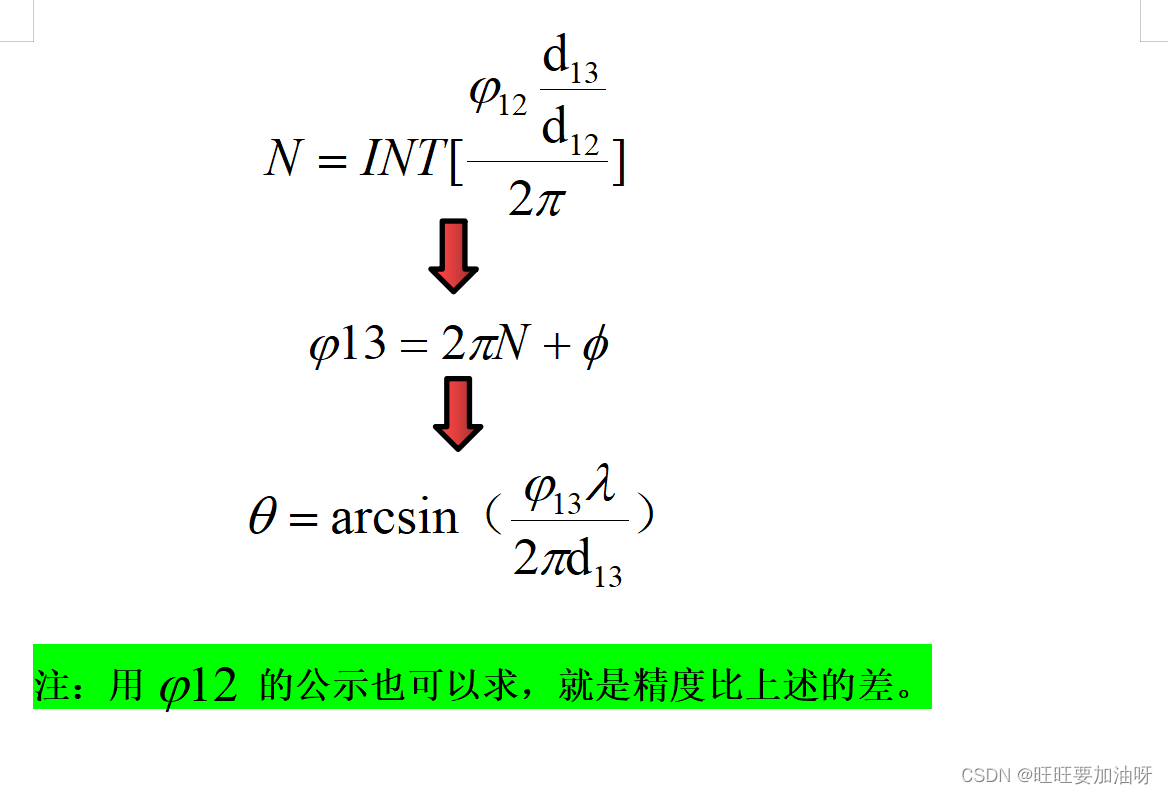
1. 相位法测角原理与公式推导
2 振幅法测角原理
2.1 最大信号法
缺点:测角精度低,不容易完成角度跟踪,如果目标动起来,要时刻使波束最大值对准目标,因为误差大,很难实现。 两方面影响因素精度:SNR与波束宽度。 优点:测量方法简单,由于用波束最大值对准目标,SNR比较大。
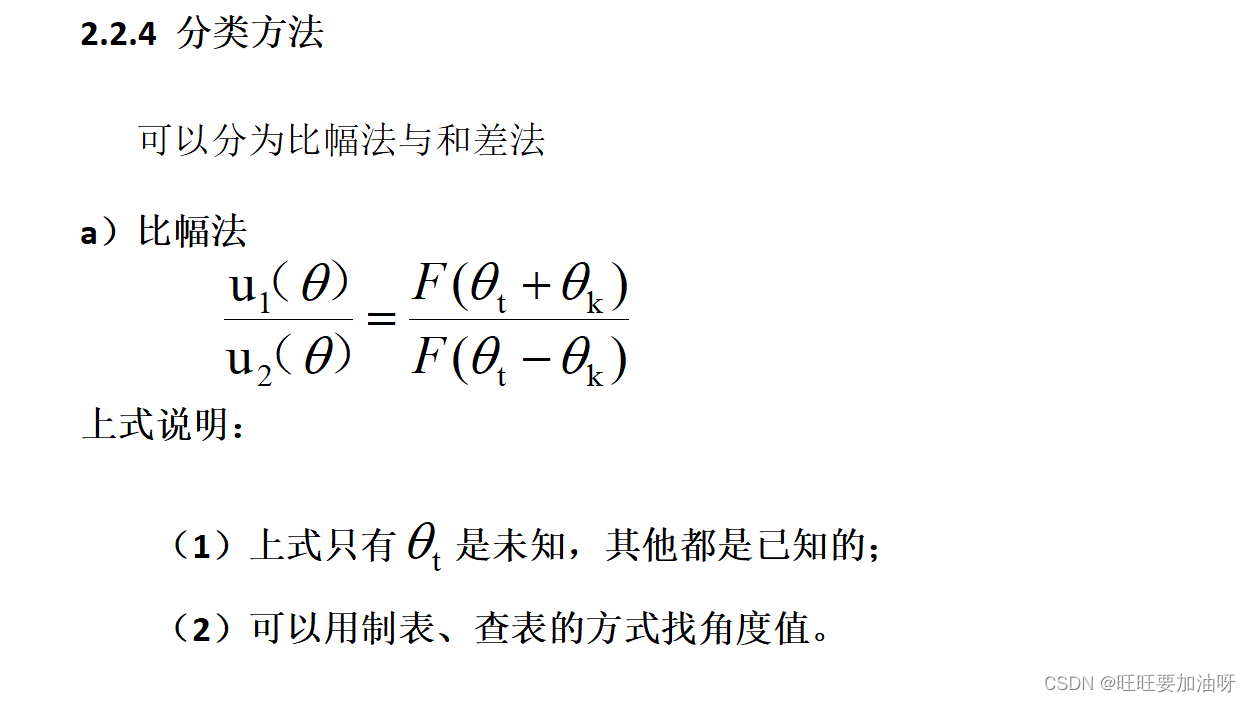
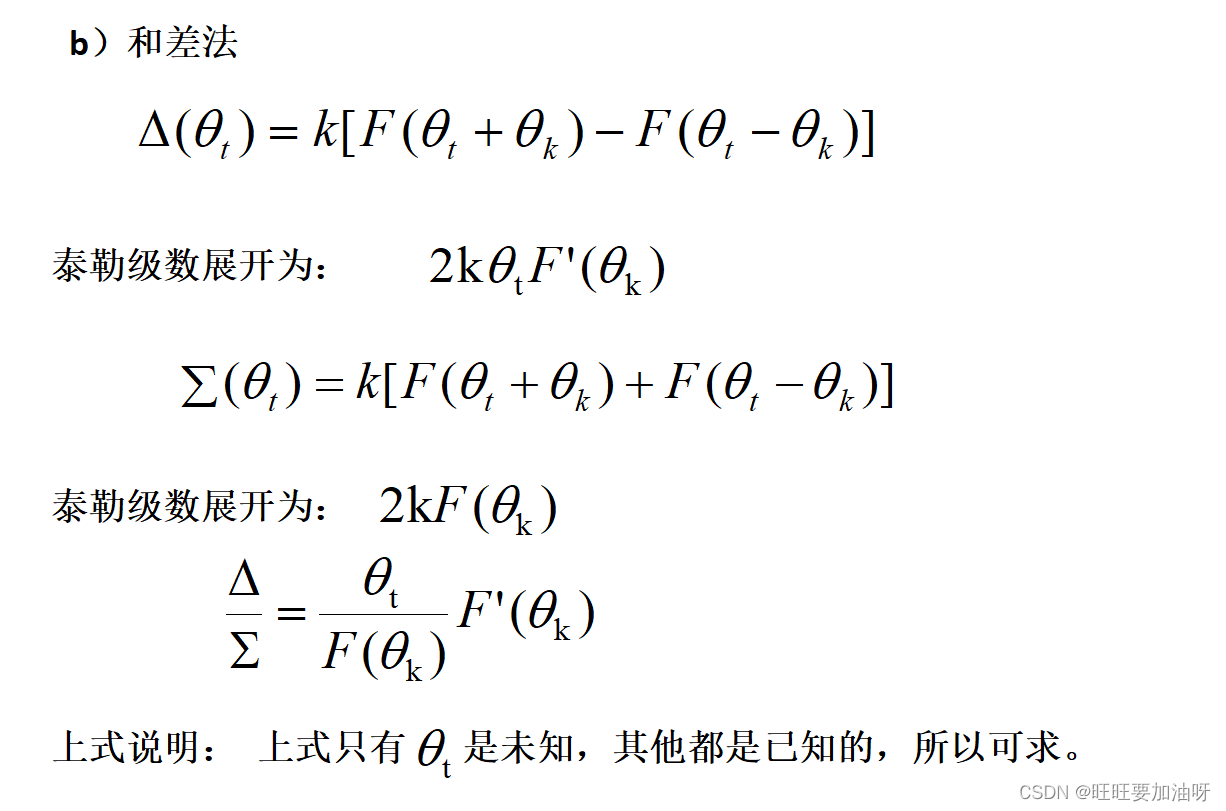
2.2 等信号法
2.2.1 优缺点
缺点:威力小于最大信号法。优点:测角精度高、可以用于角度跟踪
2.2.2 特性
(1)两天线方向图函数相同
(2)部分交叠在3dB处
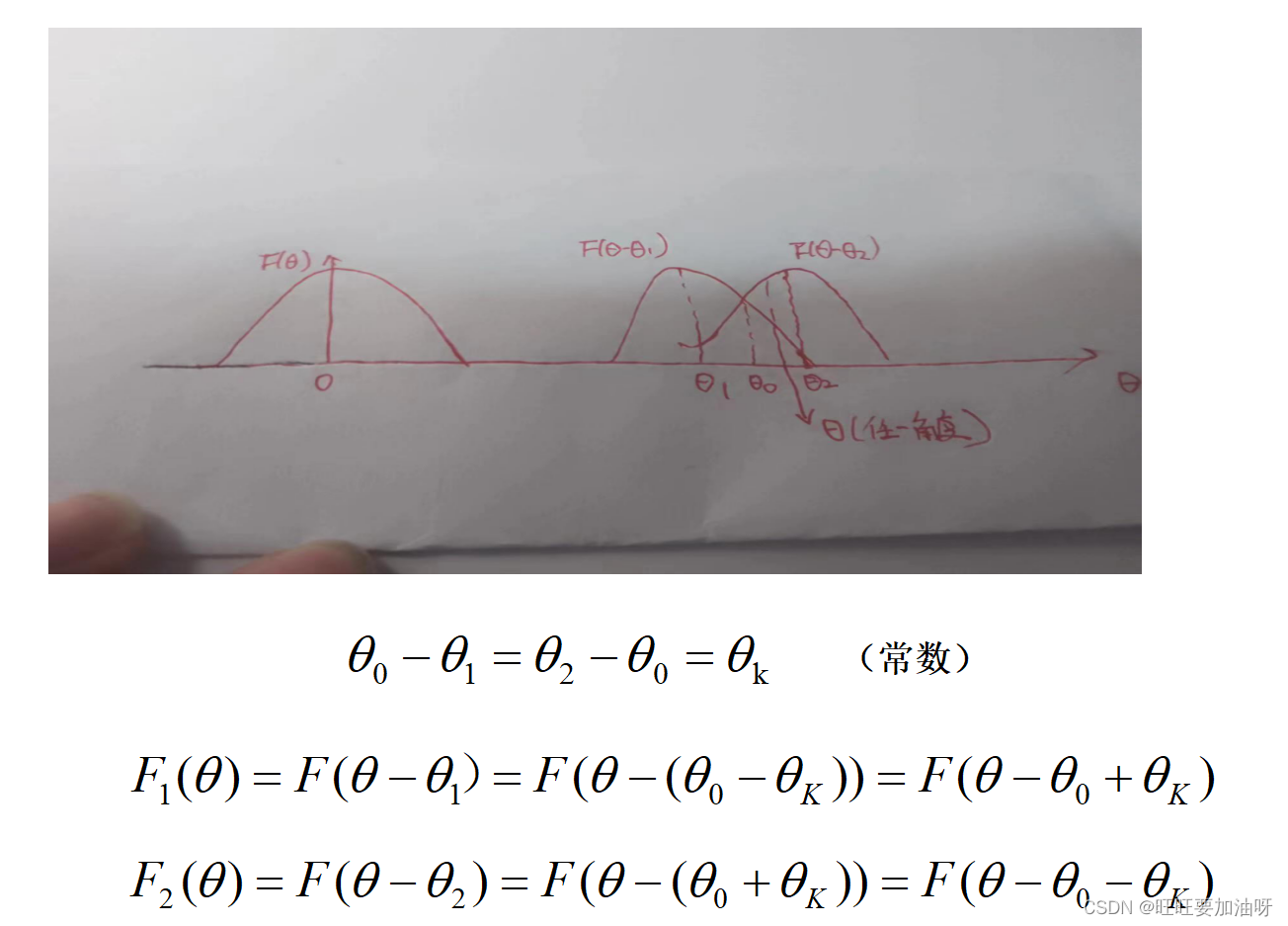
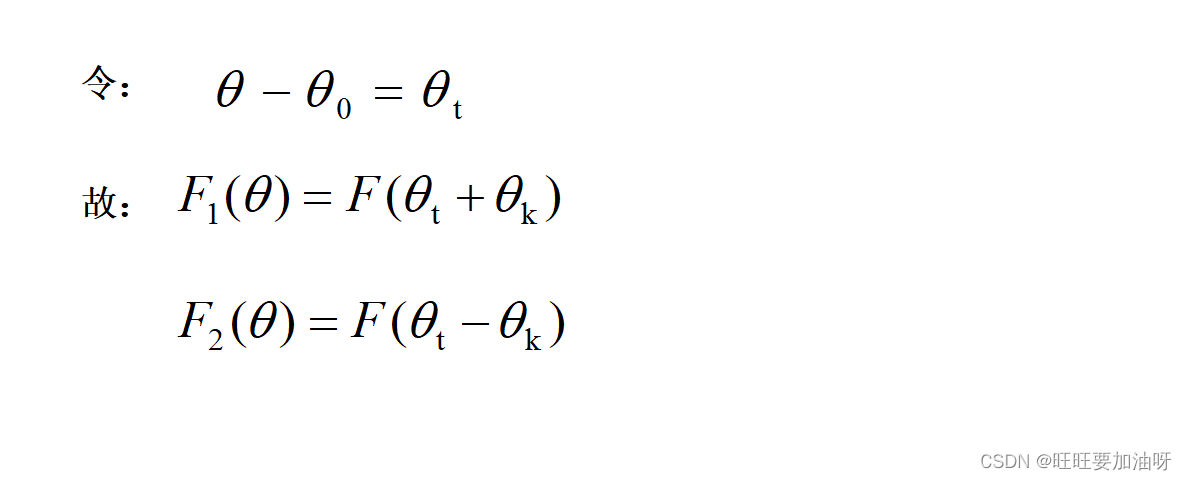
2.2.3 工作原理
3 单脉冲测角
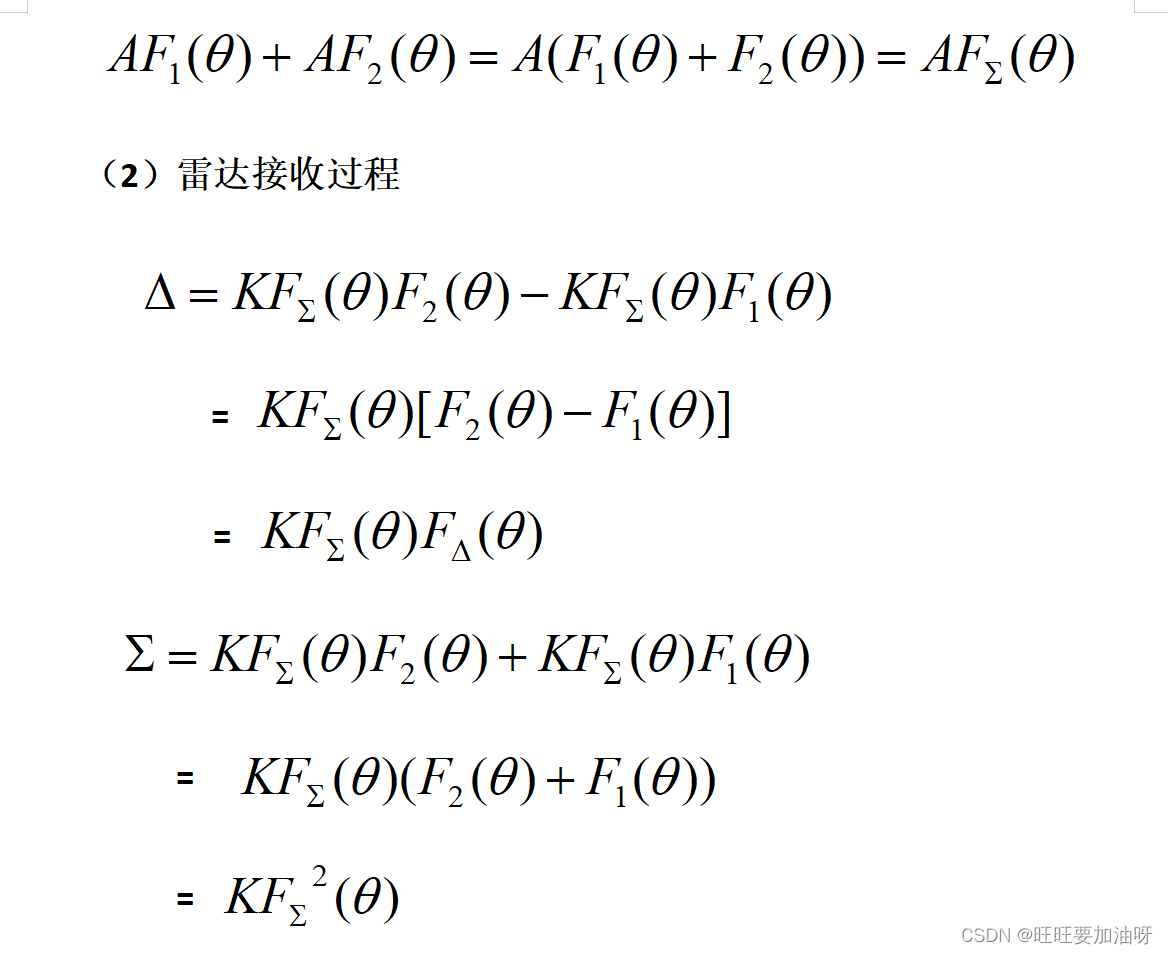
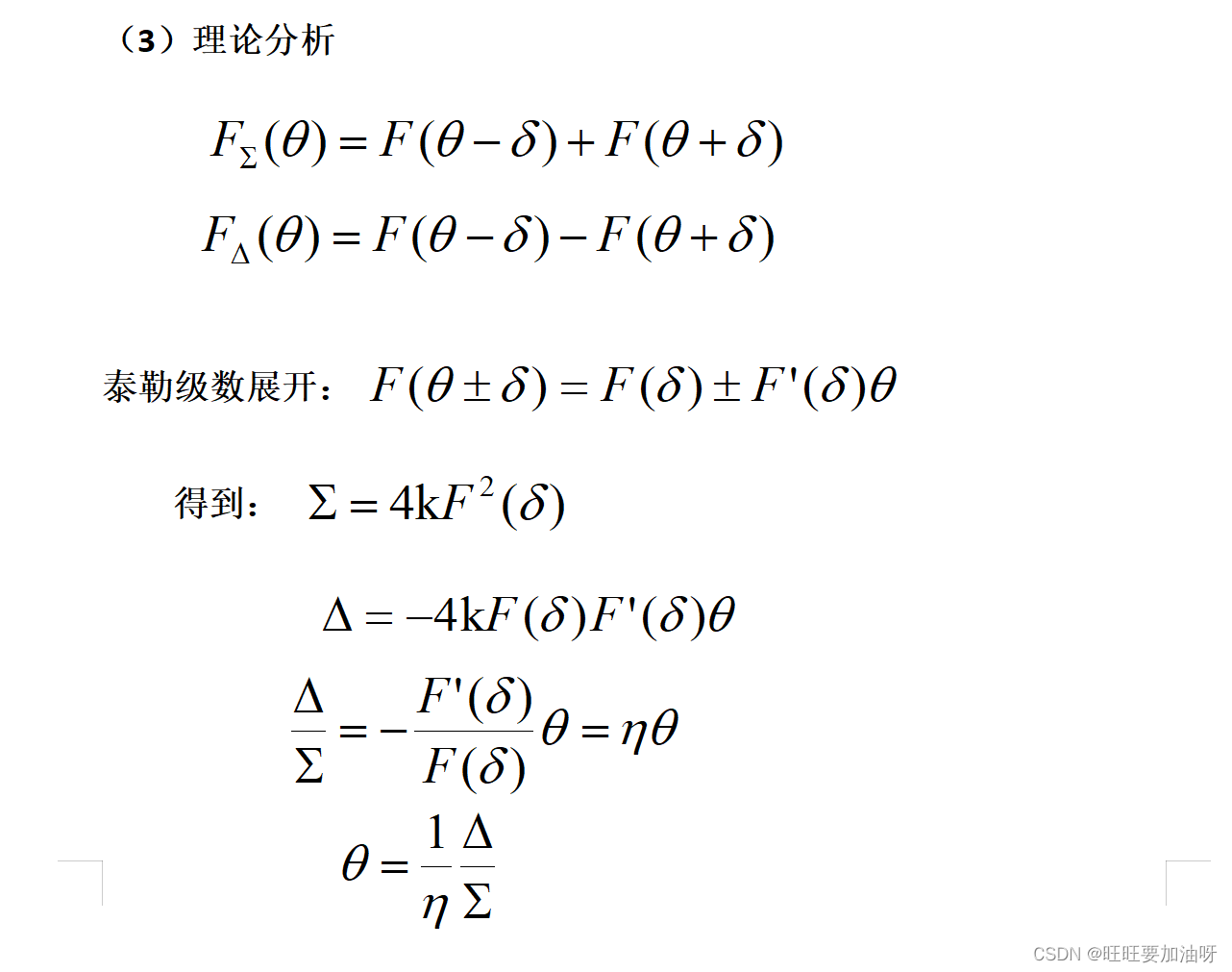
3.1 振幅和差法
(1)雷达发射过程
3.2 比相法

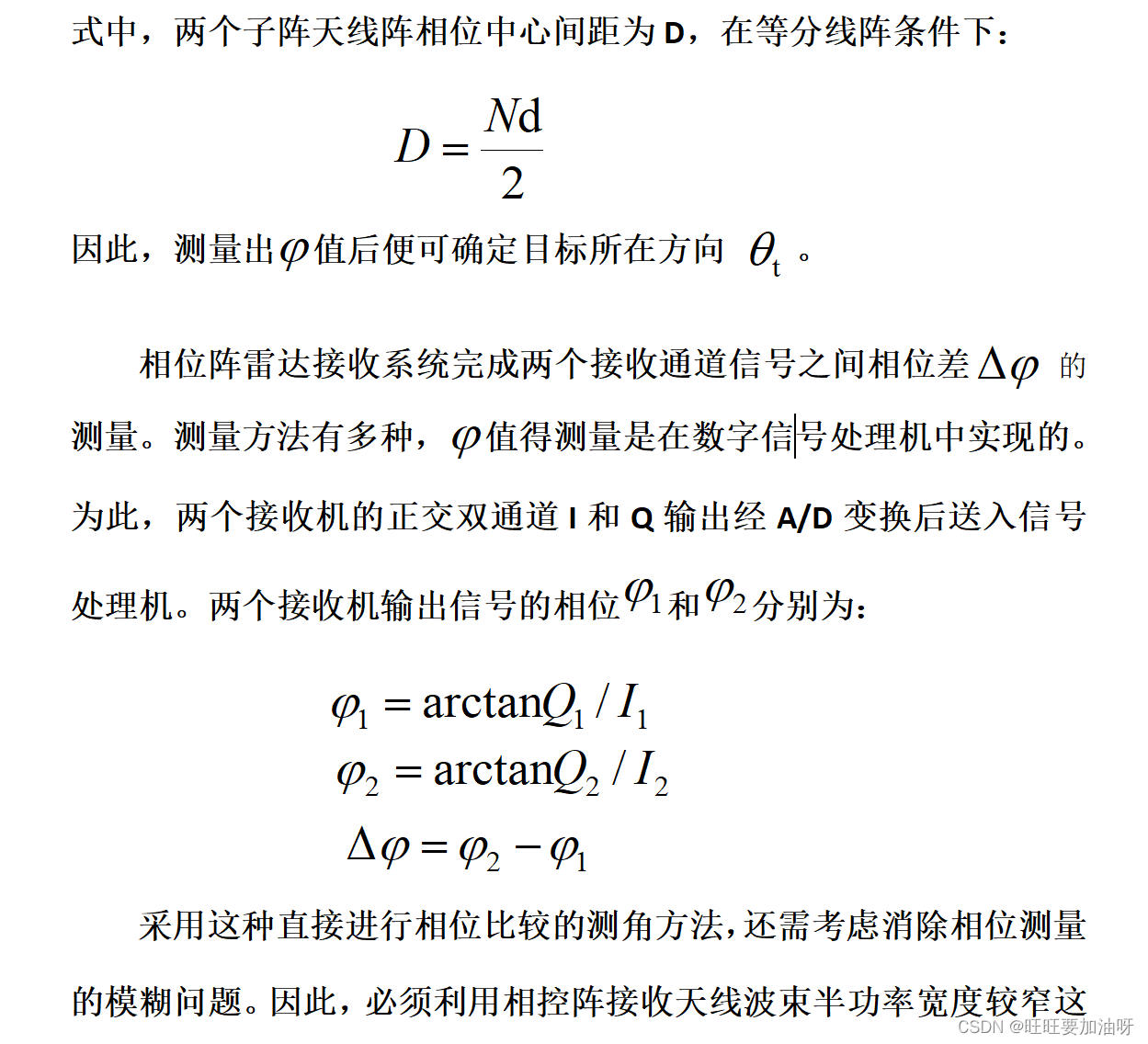
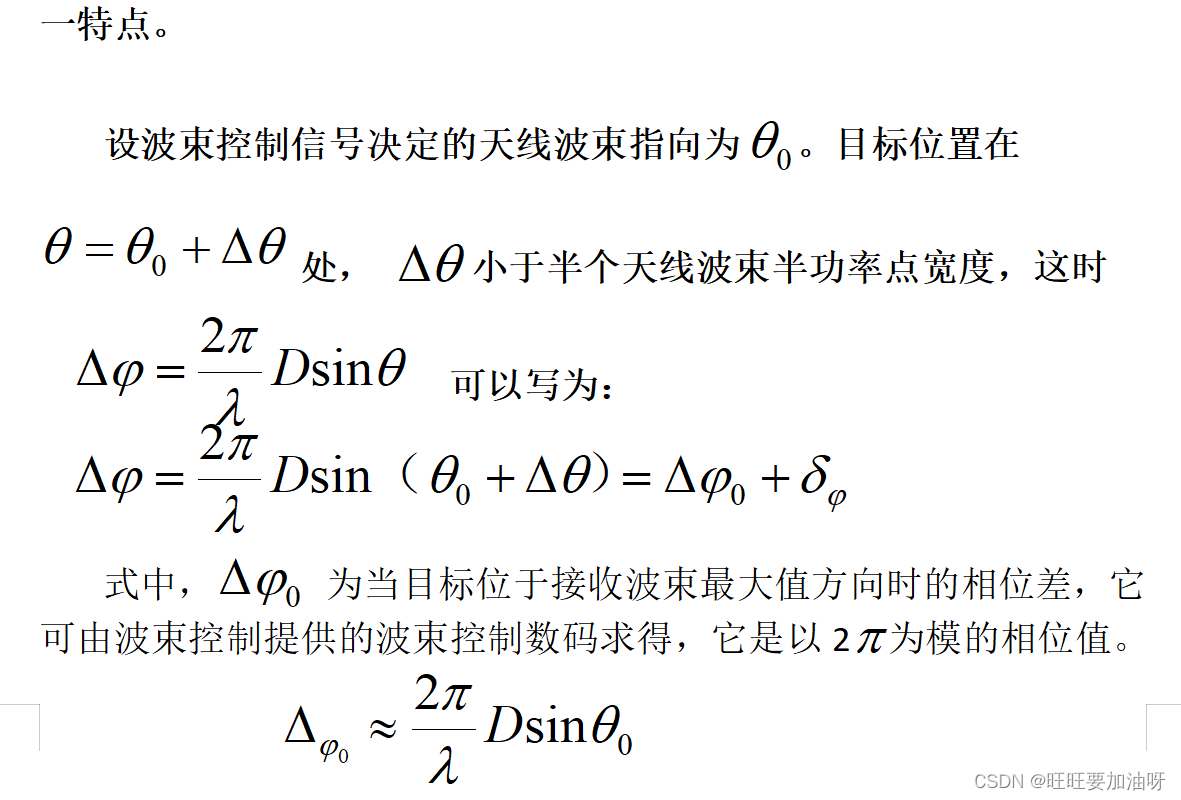
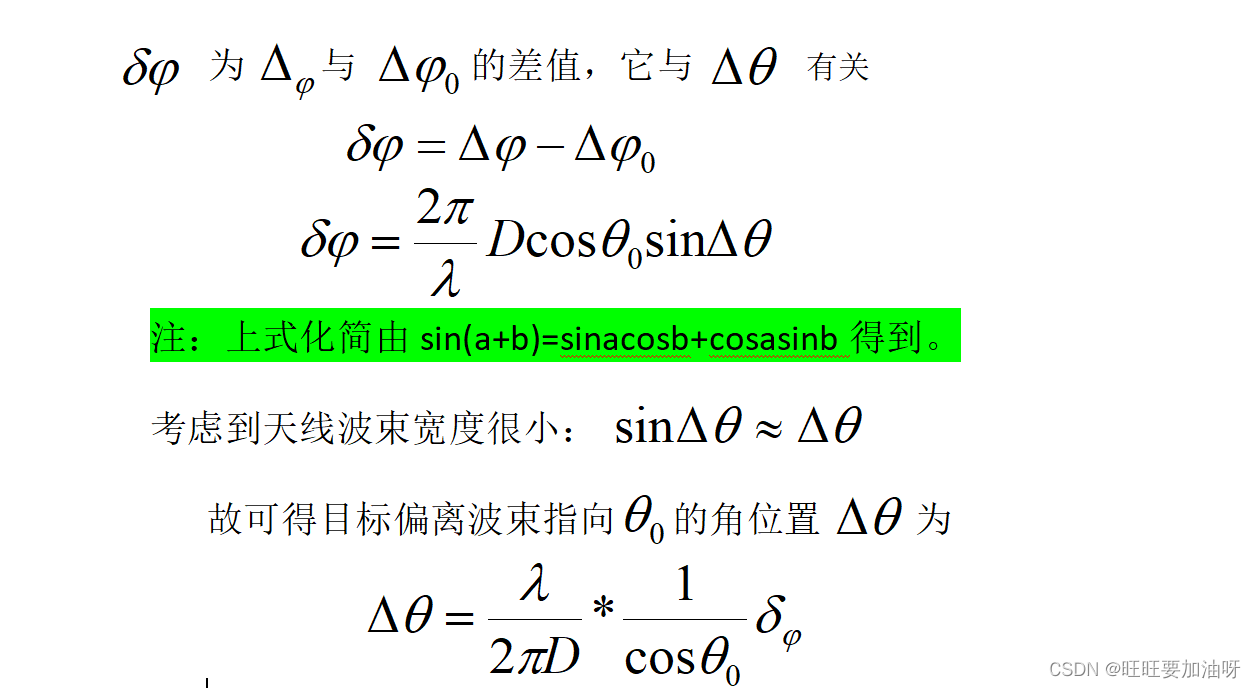
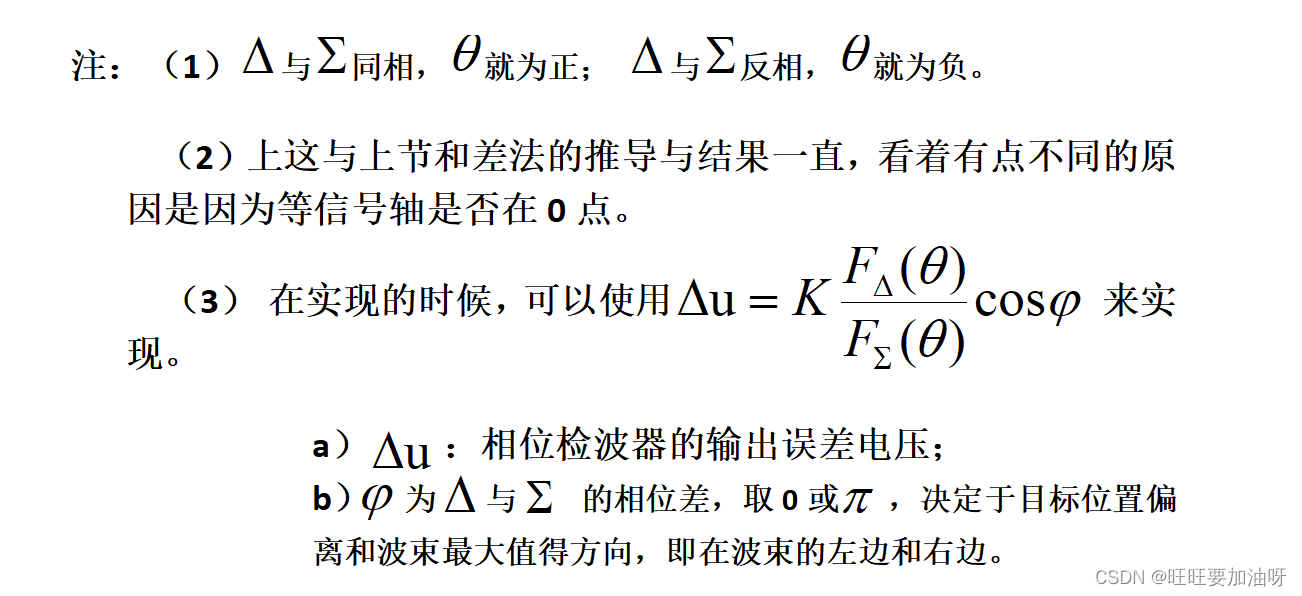
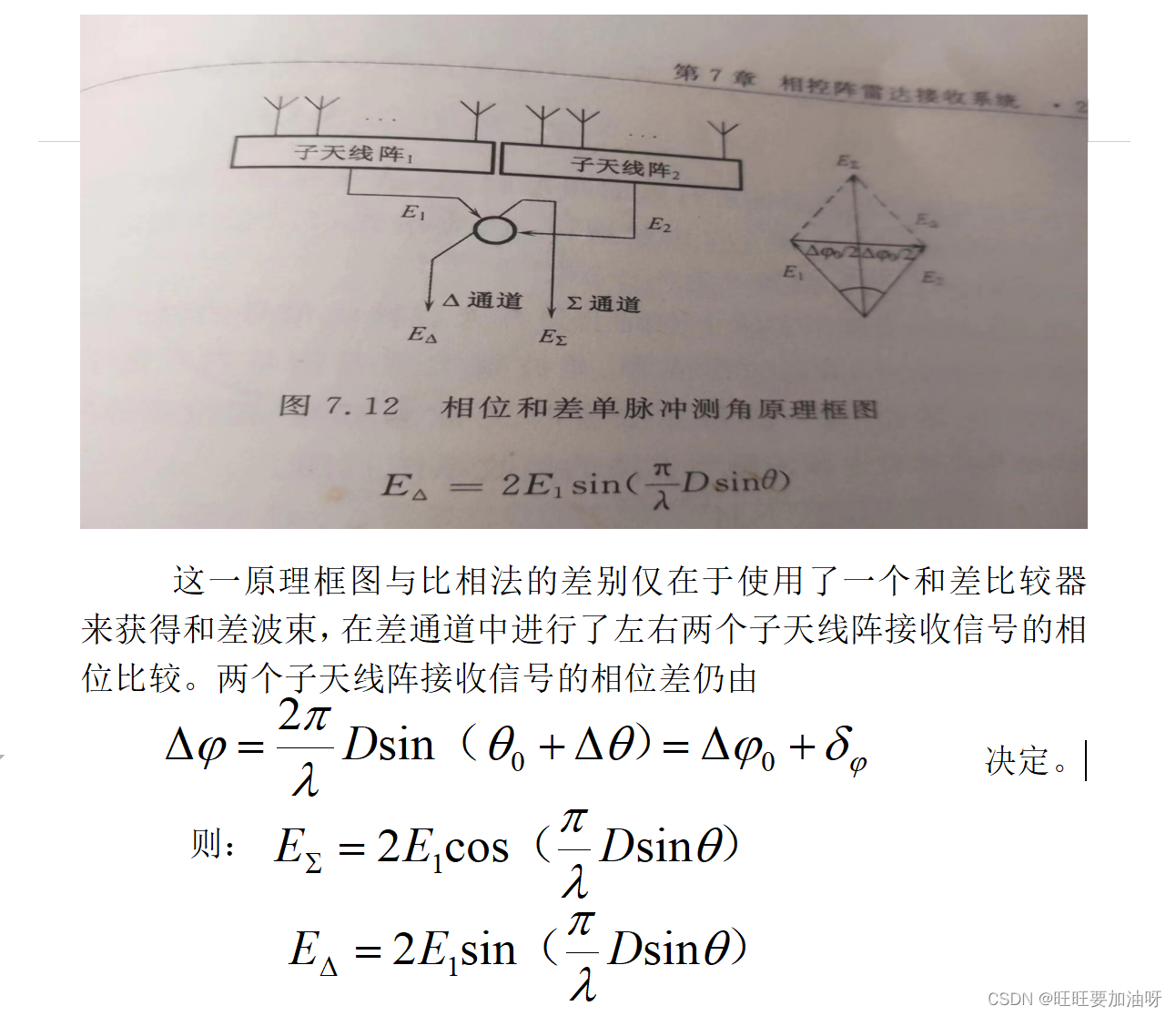
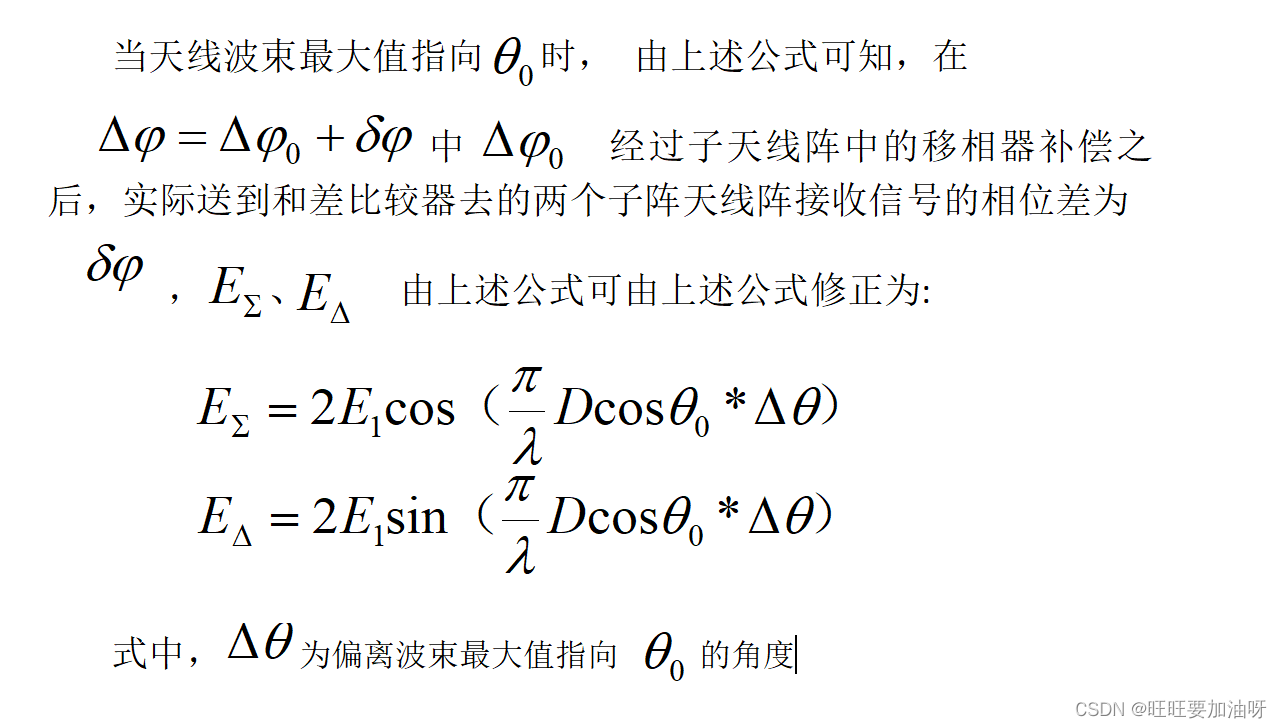
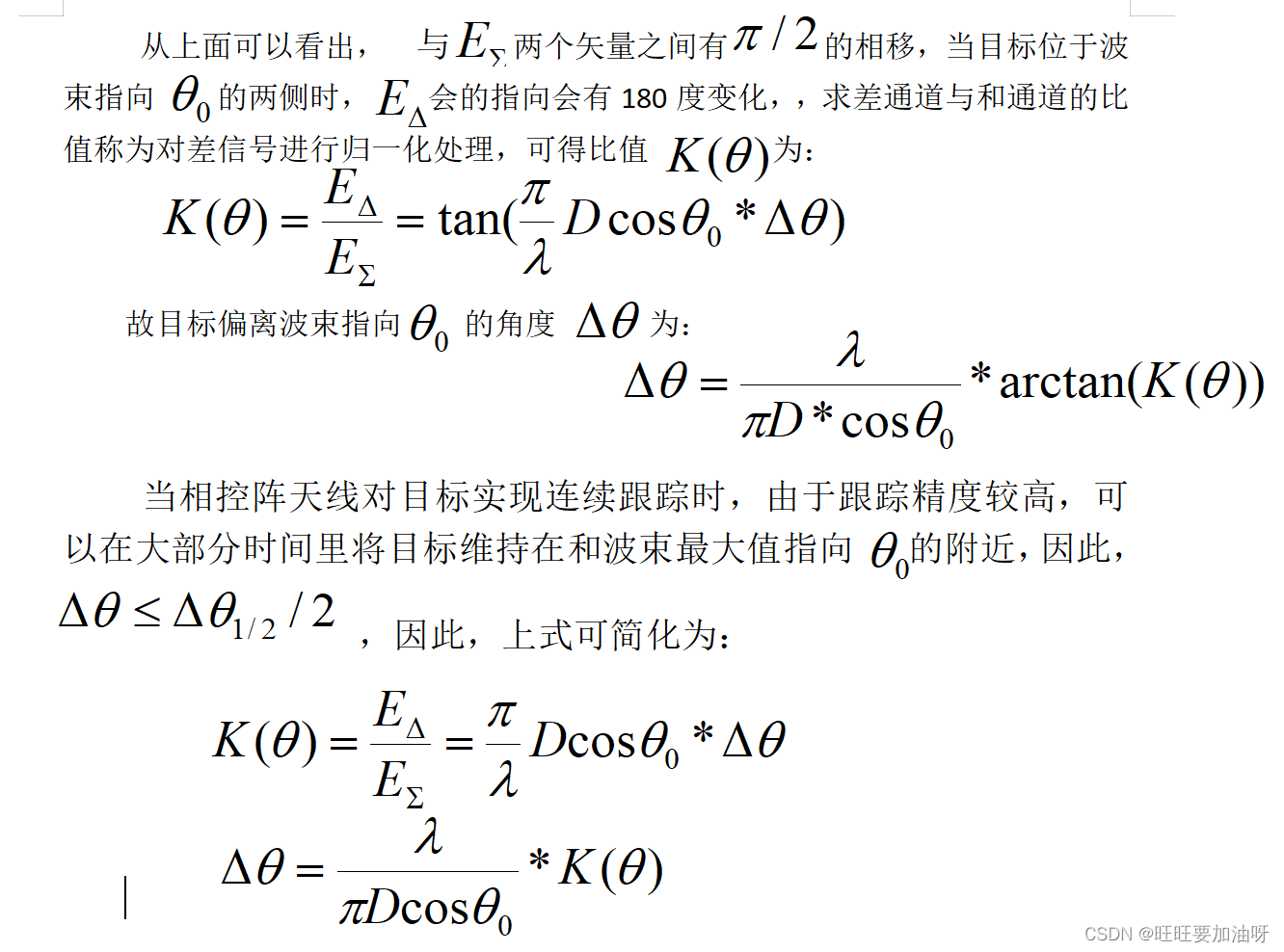
3.3 相位和差法
相位和差法matlab仿真
%% 基础参数
c=3e8;
fc=300e6;
lambda=c/fc;
disp('波长');disp(lambda);
%%
target_position=[2000,50000]; %%点目标位置
real_angle=atand((target_position(1))/(target_position(2)));%atand转为角
disp('real_angle/°');disp(real_angle);
d=2; %%两阵元的间距
R1=sqrt((d/2+target_position(1))^2+(target_position(2))^2);
t1=2*R1/c;
R2=sqrt((-d/2+target_position(1))^2+(target_position(2))^2);
t2=2*R2/c;
%%
%线性调频信号测距
T = 10e-6; % 脉冲持续时间
B = 15e7; % 脉冲带宽
K = B/T; % 调频率
ratio = 5; % 过采样率
Fs = ratio*B; % 采样频率
dt = 1/Fs; % 采样间隔
Nr = ceil(T/dt); % 采样点数
t0 = ((0:Nr-1)-Nr/2)/Nr*T; % 基本时间轴
N = length(t0); % 实际信号长度
st0 = exp(1i*pi*K*t0.^2);% 基本信号
st1 = exp(1i*pi*K*(t0-t1).^2); %回波一
st2 = exp(1i*pi*K*(t0-t2).^2); %回波二
% n = 0:N-1; % 样本轴
f = ((0:N-1)-N/2)/N*Fs; % 基本频率轴
Sf1 = fftshift(fft(st1)); % 实际信号的傅里叶变换
Hf = exp(1i*pi*f.^2/K); % 方式3的匹配滤波器:直接在频域生成匹配滤波器
out1 = ifft(ifftshift(Sf1.*Hf));
out1=out1/max(out1);
Sf2 = fftshift(fft(st2)); % 实际信号的傅里叶变换
Hf = exp(1i*pi*f.^2/K); % 方式3的匹配滤波器:直接在频域生成匹配滤波器
out2 = ifft(ifftshift(Sf2.*Hf));
out2=out2/max(out2);
plot(t0,abs(out1),t0,abs(out2));axis tight;legend('out1','out2');
title('匹配滤波输出');xlabel('时间');ylabel('归一化幅度');
%载频相位差测角
S1=exp(1i*2*pi*fc*(t0-t1));
S2=exp(1i*2*pi*fc*(t0-t2));
ysum=S1+S2;
ydif=S2-S1;
k=imag(ydif/ysum);
u=atan(k)*lambda/(pi*d);
theta_measure=asin(u)/2;
theta_measure=theta_measure*180/pi;
disp('theta_measure/°');disp(theta_measure);
disp('误差绝对值/°');disp(abs(theta_measure-real_angle));

















 845
845

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









