






最开始接触欧拉拉格朗日方程还是在理论力学中, ,其中,q代表自由度,L代表能量方程,在几种不同的情况下能量方程的含义和等式右边也有所不同,如上图所示,通过该方程就可以建立系统运动微分方程,求解一系列力学问题。后来学习非线性控制时,发现也有欧拉拉格朗日方程的身影,这次是在一般形式下,从最小化代价函数的角度出发求解最优路径的问题。今天着重描述一下后者:
(后来才知道,本质上这两个都属于数学中的变分法,我以为两个不同的东西竟然能统一起来真的很神奇,但本质上他们就是同一个东西。不得不感慨,数学在工科中真的是降维打击。当然纯数学的理论我也不是很懂,欢迎各路大神批评指正!)
以下内容参考了慕尼黑工业大学Boris Lohmann 教授的 现代控制理论2 讲义:
考虑如下形式的代价函数:
其中 为已知,求最优的路径
。
我们假设最优路径为 ,那么,其他有偏差的非最优路径我们可以表示为:
,其中,
为变化量或者说偏差量,
是一个有正上确界的小量。很自然,当
值为0时,轨迹为最优轨迹,在此时
是任意的,那么我们令:
,这样,原来的初始状态和最终状态都没有发生改变。
通过以上的论述我们不难将一般化轨迹的代价函数写为一个关于 的函数:
一般的,我们处理极值问题即是将函数求导以后令导数等于0,这里我们又预先知道 为0时该代价函数最小,于是有: 。接下来我们将等式左边展开,看看会得到什么 (以下数学过程见图片里的手动推导)
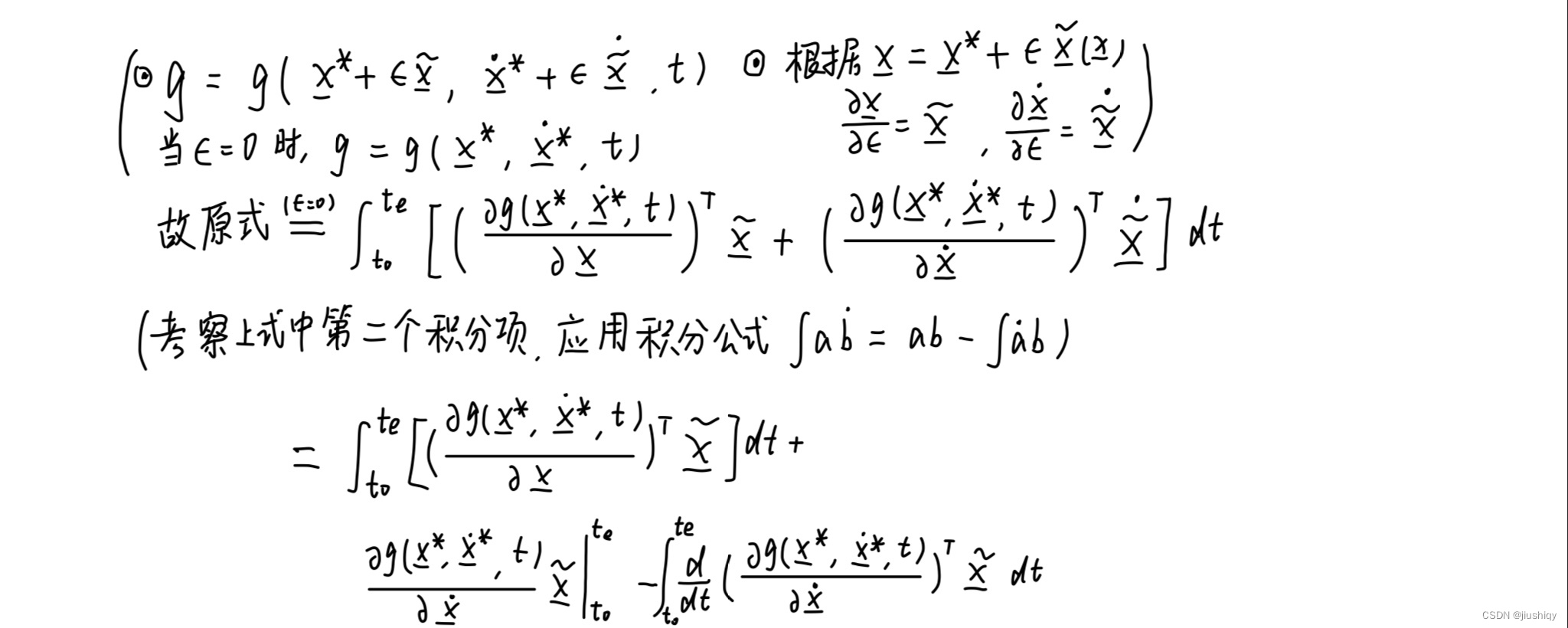
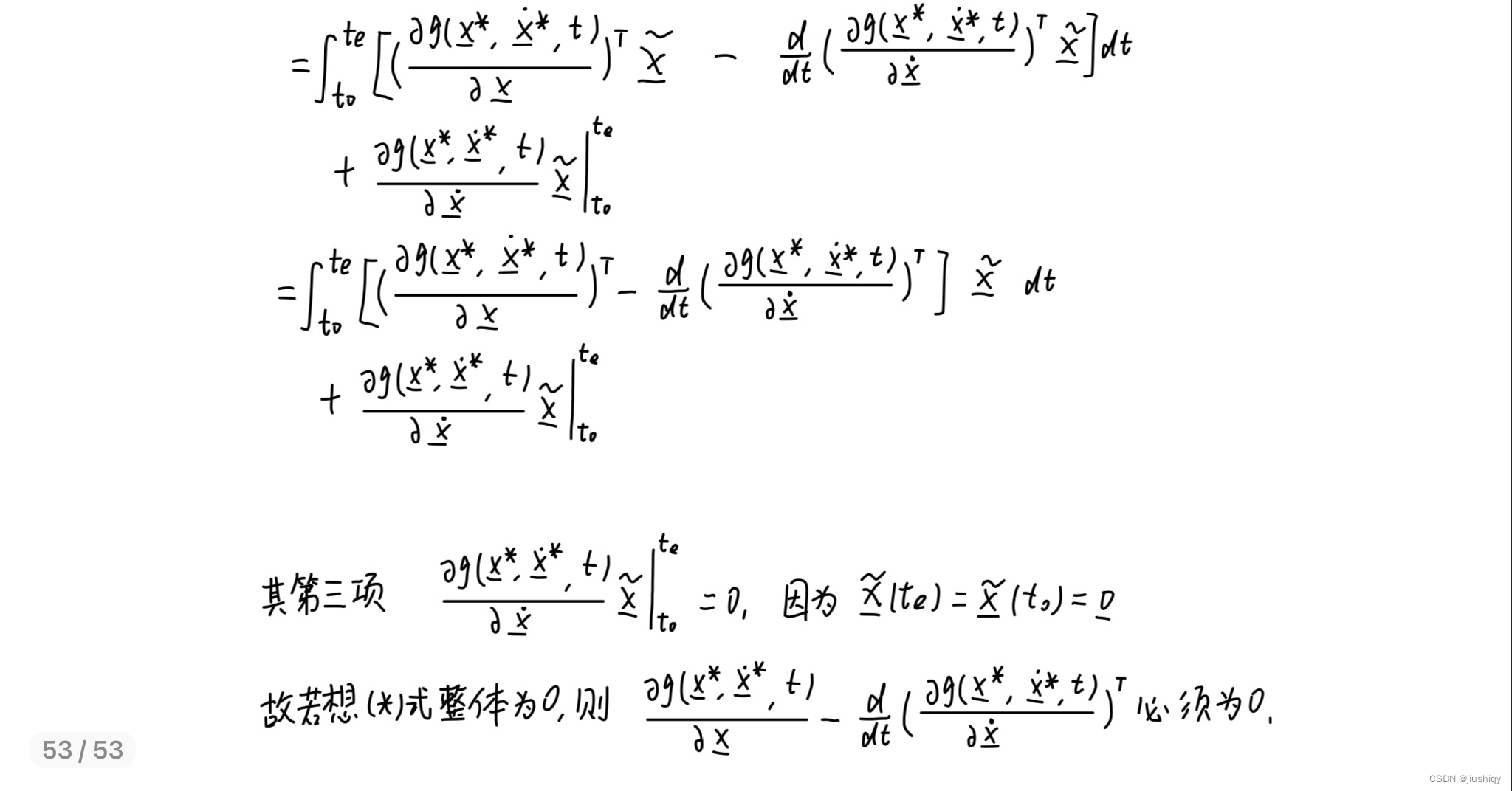
细心的同学可能已经发现了,此时我们熟悉的欧拉拉格朗日方程又一次闪亮登场:
即,当代价函数已知并满足我们上述的几个假设时,满足上面方程的轨迹 即为最优轨迹。额外的,当上述假设不成立时,我们需要在这个方程的基础上增加一些条件再进行求解。后续我还会更新以下非线性控制的内容,这个方程在那里也会被频繁用到。
以上,如有不当之处,欢迎各路大神指出,并批评指正!















 7157
7157

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









