






引言
第一性原理,这个源于哲学和物理学的概念,不仅是今年耳熟能详的名词,也已经成为一种新的思维方式,一种产品开发理念。
智能驾驶,逐渐占据了汽车智能化的半壁江山:新势力的特斯拉和蔚小理,传统车企孵化的公司如毫末、零束等,各类科技公司和互联网公司如华为、百度等。每家公司都推出了自己的智能驾驶产品,可谓百花齐放、百家争鸣。
当第一性原理遇到智能驾驶,又会碰撞出怎样的火花?秉承第一性原理的产品理念,应该如何去打造一款智能驾驶产品?从第一性原理的角度,什么样的智能驾驶产品能够赢得市场?我们来详细地谈一谈。
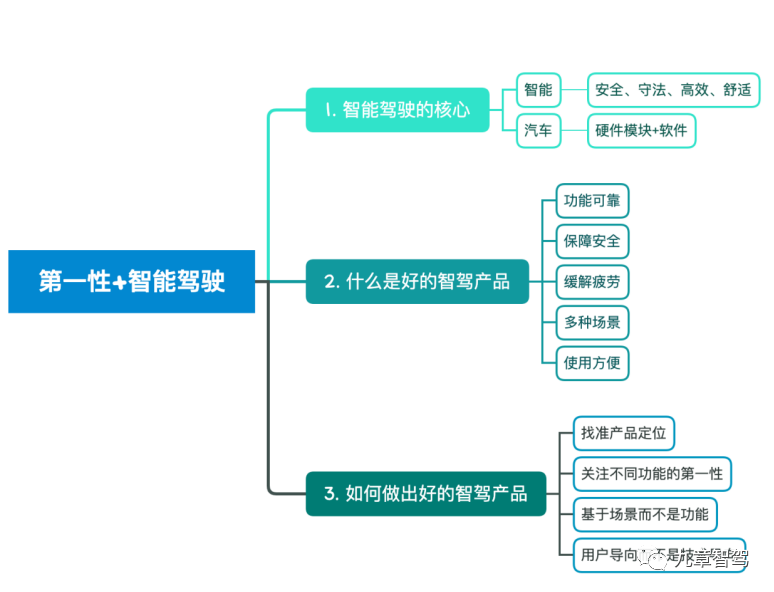
PART 1 什么是智能驾驶的核心
根据第一性原理的理论,我们首先要弄清楚,智能驾驶的核心和本质。
智能驾驶,就是把人工智能技术应用到汽车上,从而让车变得足够聪明,能够部分甚至全部地取代驾驶员,自动完成驾驶行为。那么,顾名思义,智能驾驶的核心就是两部分:智能和汽车。
智能,最终目标是,让车像人一样行驶。换言之,老司机怎么开车,智能驾驶系统就怎么去开车。对于老司机来说,保证安全、遵守基本的交通法规只是前提,而如何提高通行效率、如何把车开得平稳舒适,则是驾驶过程中更加需要考虑并逐渐形成的经验之谈。
那么,对于智能驾驶产品来说,既然是学习老司机,那么也应该做到安全、守法、高效、舒适,这样,才可以称为“智能”。
汽车,其定义是“由动力驱动,具有4个或4个以上车轮的非轨道承载的车辆”,其组成模块包括电子电器、座舱、外饰、底盘、动力、车身,以及软件这一灵魂。一款好的智能驾驶产品,必然也要综合考虑到汽车这些模块。
电子电器模块作为智驾系统的硬件载体,软件作为智驾系统的核心,这两者一般不会被忽略。但是,用户高感的座舱模块,以及决定动力学性能的底盘、动力、车身模块,往往容易被忽略。很多做智能驾驶的公司,尤其是缺乏传统汽车底蕴的新势力、互联网、科技公司,并没有意识到汽车本身作为一个高度平衡的整体,其动力性、操稳性、平顺性等等,都是需要考虑到的。想要做好智能驾驶产品,就不能忽略汽车其他模块对产品性能的影响。
PART 2 什么是好的智驾产品
产品的第一性是什么?答案是:用户的需求。需求决定产品,一款好的产品,一定是能够高度满足用户需求的。
对于智能驾驶来说,用户的需求是什么呢?奥迪、美国汽车协会、易车研究院、今日头条等公司和机构,陆续开展了关于智能驾驶的用户调研,并公布了调研结果。从几家的调研结果来看,用户对智能驾驶最关心的是:能否减轻驾驶疲劳、能否解放双手、安全性与可靠性。而业内人士广泛关注的先进性和高科技等特点,其实并不是用户最关心的点。
与此同时,用户关注度高的智能驾驶功能,是那些主动安全类功能如碰撞预警和自动紧急制动等,这些功能可以提高车辆在复杂交通环境下的安全性。而厂商和媒体大肆宣传的高级自动驾驶功能如领航驾驶等,并没有获得用户特别高的关注度。
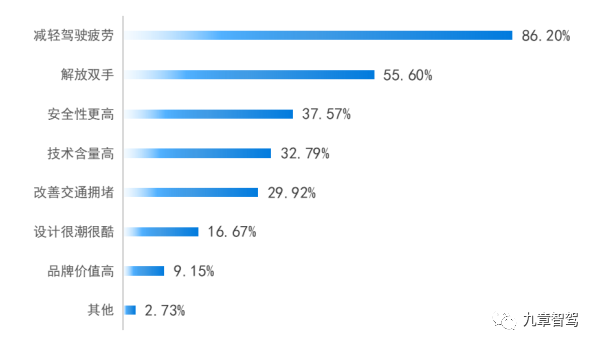
图1 用户对智能驾驶的关注点
(图片来源:易车研究院2021年《自动驾驶用户认知洞察报告》)
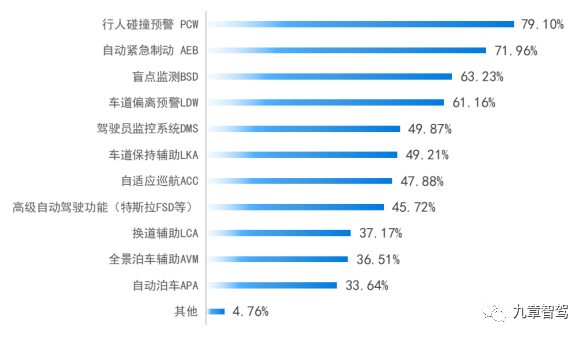
图2 智能驾驶不同功能的用户关注度
(图片来源:易车研究院2021年《自动驾驶用户认知洞察报告》)
既然用户对智能驾驶的最大需求是能够减轻疲劳和安全可靠,那么一款好的智能驾驶产品,就必须重点发力于这两点,充分满足用户的需求。
除了车企和专业机构的调研外,我们也发起了一些关于智能驾驶的用户调查活动,发现了一些新的“用户爽点”和“用户痛点”。从图3-5可以看出来,除了安全可靠和缓解疲劳外,用户同时希望智能驾驶功能可以覆盖更多的使用场景。
比如,当前的高速领航驾驶功能,已经覆盖了高速公路的主干道、匝道场景,但是在收费站、施工路段等场景下,仍需要驾驶员接管;如果能把这些需要接管的场景也覆盖,实现高速公路所有路段的领航驾驶,相信可以明显地提升用户体验。
另外,用户使用智能驾驶的操作便捷程度,也是影响用户体验的一项重要因素。比如可以一键激活日常惯用的各项智能驾驶功能;比如系统自动识别到特定场景,主动向用户推荐启用对应的功能,用户只需要确认就好,而不需要再去自己找到功能,再启用;比如可以通过语音唤起更多的智能驾驶功能,当然前提是语音识别的准确率能够保证。
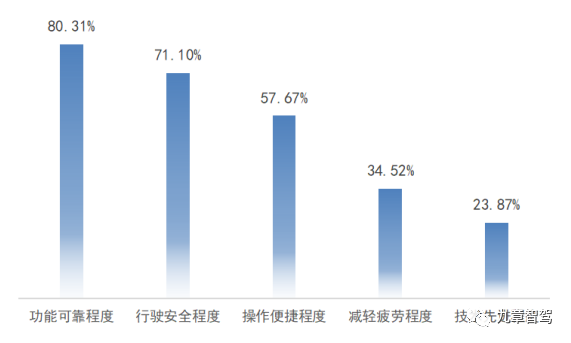
图3 影响用户使用智能驾驶的因素
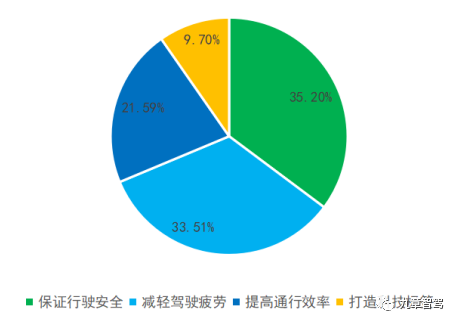
图4 用户希望智能驾驶能达到的效果
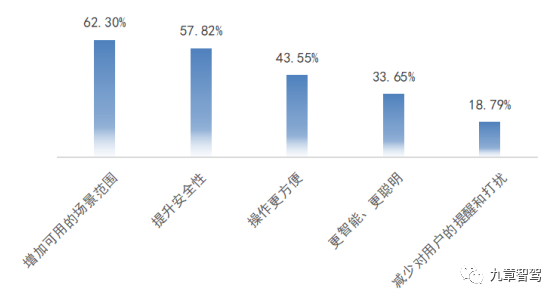
图5 用户希望智能驾驶的改进
通过以上用户需求,我们可以定义一款好的智驾产品,所必备的特点:
①功能可靠、不易故障、鲁棒性好;
②充分保障行驶的安全;
③减轻用户驾驶时的疲劳;
④尽可能多地覆盖用户出行场景;
⑤功能使用方便,操作简单快捷。
PART 3 如何做出好的智驾产品
当前的智能驾驶玩家非常多,无论是新势力、传统车企、Tier 1,还是互联网、科技公司,都在竞争开发自家的智驾产品,推出了一项又一项的功能。
表1 市场智驾头部玩家及其产品
| 序号 | 公司 | 公司类型 | 典型智驾产品 |
| 1 | 特斯拉 | 造车新势力 | 高速领航驾驶NOA,智能召唤,哨兵模式 |
| 2 | 小鹏 | 造车新势力 | 高速+城区领航驾驶NGP,记忆泊车,自动驾驶环境模拟显示SR |
| 3 | 蔚来 | 造车新势力 | 高速领航驾驶NOP |
| 4 | 理想 | 造车新势力 | 高速领航驾驶NOA |
| 5 | 谷歌 | 互联网公司 | 特定区域L4级自动驾驶Robotaxi |
| 6 | 百度 | 互联网公司 | 特定区域L4级自动驾驶Robotaxi |
| 7 | 华为 | 科技公司 | 城区领航驾驶 |
| 8 | 小马智行 | 科技出行公司 | 特定区域L4级自动驾驶Robotaxi |
| 9 | 毫末智行 | Tier 1(长城) | 高速领航驾驶NOH |
从表1可以看出来,几乎每个玩家,都在开发领航驾驶功能,先实现高速场景,再逐渐覆盖城区场景;高级泊车功能虽然只有小鹏量产了记忆泊车,但其他玩家也都在努力开发中;此外,各类主动安全功能和基本的ACC、LCC、TJA等辅助驾驶类功能,几乎已经成为标配。
可以说,目前市场上的智驾产品现状是:数量众多,但同质化现象严重。那么如何在这种高度同质化的竞争中脱颖而出呢?基于前文我们谈到的智能驾驶核心,和好的智驾产品的定义,该怎么去开发出一款好的智驾产品呢?
3.1 找准产品定位
找准产品定位十分重要。在成本、时间、技术水平都有限的前提下,我们必须基于用户的需求,精准地定位自己的产品,突出自己的产品优势,打造有自己特色的产品,比如,“极致安全的智能驾驶”“懂用户的智能驾驶”“到哪儿都能用的智能驾驶”等等。
根据自己的实际情况,找准产品定位,抓住用户的眼球,才能在同质化的竞争中,脱颖而出。
比如特斯拉的智能驾驶在缓解疲劳、场景范围和使用便捷度层面,表现十分显眼;而可靠性和安全性并不是其优势,但这并不影响特斯拉成为智能驾驶的领头羊。大众也有驾驶辅助功能,其优势是可靠性和安全性高,大家应该很少听说大众的智能驾驶造成严重的交通事故;所以虽然大众的智能驾驶不够高级,但并不影响用户放心地使用,因而用户的评价也不错。
特斯拉凭借其先进的算法水平,打造了高级别的智能驾驶;大众凭借其数百年的产业积累,为用户提供安全可靠的智能驾驶功能;那么我们自己的优势在哪里?用户的哪些需求是我们可以充分满足从而赢得用户口碑的?这些,都是在产品定位时需要思考的。
再比如,特斯拉的特色是纯视觉感知,把摄像头的性能发挥到极致,给用户留下了“特斯拉感知功能强大”的印象;而国内众多新势力,走的几乎都是摄像头+激光雷达+高精地图融合感知的路线,虽然单纯的视觉感知效果没有特斯拉好,但是融合后的功能表现却更优。那么,对于我们自己来说,是把产品定位成纯视觉方案的感知,还是多传感器融合的感知,就要结合自身的技术水平和成本,来综合考虑了。
现在提到智驾的计算平台,几乎清一色的Orin X,N*254TOPS的算力。对于头部玩家来说,有财力有底气来玩军备竞赛,但这适合自己吗?我们要实现所定义的智能驾驶功能,一定需要上千TOPS的大算力来支撑吗?我们走性价比路线还是豪华科技路线?如果是性价比路线,那么重点应该是用最少的传感器、最便宜的芯片,做出同样效果的产品,更加侧重于算力的合理应用,而不是随大流地堆砌硬件。这也是我们在做产品定位时需要考虑的。
3.2 关注不同智驾功能的第一性
当前的智能驾驶各项功能,主要有以下3类:
(1) 主动安全功能:包括车辆各方位的风险预警和辅助控制,如FCW、AEB、LDW、LKA等;
(2) 驾驶辅助功能:辅助驾驶员控制车辆的横纵向运动,帮助驾驶员解放手和脚,减轻驾驶疲劳,如ACC、LCC、ALC等;
(3) 高级智驾功能:在特定区域内,车辆可以完成点到点的自动驾驶,除了紧急情况外,全程不需要驾驶员干预。
具体的功能解读,请参考九章智驾之前的文章《详解智能驾驶的功能与场景体系》。
主动安全类功能的第一性是安全。在产品开发时,必须把安全放在第一位,哪怕牺牲用户在其他方面的一些体验,也必须保证安全第一。
比如,AEB功能不可以手动关闭,ELK功能的横向扭矩不可以手动设置,把这些保障安全的设置强制定死,避免用户自己去调节而影响效果。这样可能会引发一部分驾驶风格激进用户的抱怨,但是当我们的主动安全功能帮助用户避免危险之后,他们会感谢我们的做法。
驾驶辅助类功能的第一性是辅助。辅助的含义就是人机共驾,人为主,车为辅。这些功能的性能表现固然重要,但是用户高感的人机交互体验,是更为重要的内容。
对于大部分用户来说,ACC的跟车距离大一些或者小一些,LCC是不是完全保持在了车道正中央,拨杆变道用了6秒还是8秒,其实并不太重要;而这些功能的开关是否方便,能不能准确地显示出各项功能的工作状态,能不能及时地给到用户必要的提醒,这些对用户体验的影响更直接的细节反而更值得引起重视。
高级智驾功能的第一性是高级。按照SAE的分级标准,当前的高速领航驾驶、城区领航驾驶、记忆泊车、自主代客泊车等功能,其实已经算是L3+级别了。对于这些高级功能,用户最希望的就是可以真的完全放心把控制权交给车辆,而驾驶员可以不被打扰。此时我们的关注点更多应该是车辆的行驶表现,能否像老司机一样行驶并且不会经常打扰驾驶员,驾驶员也不需要过多干预。
3.3 基于场景而不是功能
对于智驾产品来说,功能,是开发层面的事情,前面我们提到充分考虑不同功能的第一性,也是为了在开发过程中抓住重点,有的放矢。但是,用户并不是十分清楚每项功能的详细定义,大部分用户也不需要去学习各种各样功能的含义;对于用户来说,在不同出行场景下的产品表现,才是他们能直观感受到的。
用户更在意的是不同场景下的产品体验,而不希望被教育着使用种类繁多的功能。虽然说功能和场景,大部分是有对应关系的,但是场景更加综合,更加接近用户的使用和体验。因此,我们在定义产品、体验产品时,一定要从场景角度考虑,而不是局限于功能。

图6 用户出行全场景
(图片来源:https://www.sohu.com/a/423623634_796103)
总体来说,用户出行的场景主要包括城区行驶、高速公路行驶和停车场泊车三大类。
城区的特点是交通环境复杂,环境开放,不确定性高;行人和两轮车数量多;交通标识不理想,存在部分缺失的情况。在城区场景下,既要兼顾横向和纵向的运动控制,又要能提前考虑各种意外情况,规避各种可能的风险,同时又希望提高通行效率,这就要求我们对多种功能的表现综合考虑,比如把ACC+LCC+变道的性能参数放在一起来定义,而不是单独定义每项功能然后再简单叠加。
比如城区中典型的十字路口场景,存在车道线、引导线、红绿灯、指示牌、交警等多种交通标识,也存在行人、两轮车、动物等高度不确定的障碍物,此时就需要多种辅助行车功能与主动安全功能共同起作用,对应的参数应该是“针对十字路口的综合性能参数”。

图7 十字路口场景
(图片来源:https://www.sohu.com/a/408727136_120591175?_trans_=000014_bdss_dkwhfy)
再比如城区中另一类场景:学校门口。当车辆识别到前方有学校时,就应该提前减速,观察有无学生,有无突然穿出儿童的风险。ACC、LCC等功能的简单叠加,是做不到这样的效果的;一定要基于学校场景,让车辆学习老司机的做法,才能实现。
高速公路的特点是交通环境简单,高度确定,场景封闭;障碍物少;交通标识清晰完整。在高速场景下,车辆要做的就是高效率通行,在紧急情况下及时提醒驾驶员,在非紧急情况下不打扰驾驶员。
虽然已经有了高速领航驾驶功能,可以一键开启高速场景的自动驾驶,但对于高速中典型的场景,我们还是需要重点考虑,提前把各种可能的场景都识别出来,让智能驾驶系统自己根据先验知识来完成行驶任务,避免打扰驾驶员。比如各种匝道、收费站,其实是有标准的,我们可以结合自己的经验,把典型的高速公路场景研究透彻,进而定义在各类场景中的参数,这样可以进一步提升用户在高速场景下使用智能驾驶的体验。
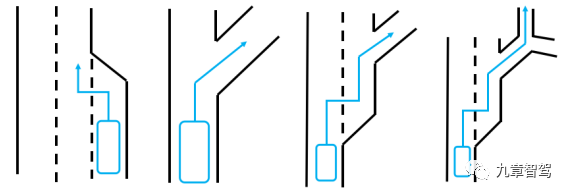
图8 高速公路场景
停车场的特点是场地固定,静态环境变化少;车速低,但车辆行驶路径多样;障碍物复杂、不确定。在停车场内,智能驾驶的任务很简单,就是辅助用户泊车,或者自主完成泊车。
当前停车场的种类固定,车位类型有限,交通标识有限,静态障碍物种类有限,因此我们可以基于不同的停车场景,充分研究车辆在不同类别停车场景下的表现,完成停车场景的智能驾驶开发。这样,用户可以体验到的,是在标准的商用停车场内快速停车,在让人头疼的旧小区内轻松停车,在路边的临时停车位里便捷停车,而不是简单的APA、HPA、AVP。
具体的停车场景,请参考九章智驾之前的文章《详解智能驾驶的功能与场景体系》。
3.4 用户导向而不是技术导向
传统的汽车开发基本都是技术导向,即工程师开发了某项功能,用户接受这项功能,去使用。尤其是传统合资主机厂和Tier 1,更是如此。
但处于大变革时代的汽车开发,尤其是智驾产品的开发,应该是市场导向,或者叫:用户导向。一切源于用户,一切从用户的角度考虑问题,这就需要开发者从传统的工程师思维,转变成用户思维。
下面用几个案例来说明。
第一个案例,当前几乎所有的高速领航驾驶,默认的行驶车道都是最左侧车道,从技术上来说,最左侧车道识别度更高,最容易做到。但是,无论是交通法,大数据分析,还是老司机的经验,都告诉我们:对于四车道以上的高速公路,最适合长期行驶的,其实是左侧第二车道;最左侧车道是超车道,不应该长期占用,并且最左侧车道的事故率要高于中间车道。
所以我们在开发领航驾驶时,应该避免简单地从技术角度就把最左侧车道作为默认行驶车道,而是更多地为用户考虑,开发出更加合理合法的产品。
第二个案例,以前我们在开发智能ACC时,团队有成员非常有创意地通过调整某个参数,让ACC功能具备了部分Auto Hold的能力,但是此时却会影响原本的Auto Hold效果。该成员的意见是:这是一项技术的创新,用户应该习惯新的技术,而不是墨守成规。我们经过讨论,在肯定了该同事的创新精神后,最终从整体的用户体验层面,否定了这种做法。毕竟,基于用户思维,原本的Auto Hold已经完全达到了效果,没有必要为了创新而创新,反而降低了体验感。
第三个案例,是一个有争议的话题。目前所有的智能驾驶,当DMS检测到驾驶员疲劳时,都会启动降级退出机制。从技术层面来看,这么做无可厚非:驾驶员疲劳属于异常情况,既然检测到异常,那么智能驾驶激活的条件不满足,退出是必然的。但是,工程师们没有考虑到:既然用户已经疲劳了,从智能驾驶的第一性出发,此时不是更应该发挥作用,帮助疲劳的驾驶员完成驾驶任务吗?或者自动把车开到最近的停车场,也不失为一个好的解决方案。毕竟,用户使用智能驾驶,就是希望能缓解疲劳,如果在用户疲劳的时候,系统反而退出,强行让用户打起精神专注开车,岂不是违背了初衷?
不过,考虑到责任划分,这一情况虽然不满足用户导向,但是目前确实存在争议,还需要等到相关法规政策完善后,再继续讨论。
结语
以上,就是关于如何做好智驾产品的一些心得。其实大道至简,抛开这些分门别类的功能和高级豪华的配置,我们只需要牢记:产品的第一性是满足用户,智驾产品的第一性是帮用户开车;时刻把自己当成用户,多想想特定场景下,应该做些什么。相信爆款智驾产品的诞生,并不是难事。
















 965
965











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









