







2022-08-17更新:开源代码见copy_move(包含原作者实现链接)
一、概述
最近看了A SIFT-Based Forensic Method for Copy–MoveAttack Detection and Transformation Recovery,并按文中的方法实现了一个简单版的图像复制粘贴(Copy—Move)检测,在此做个总结。
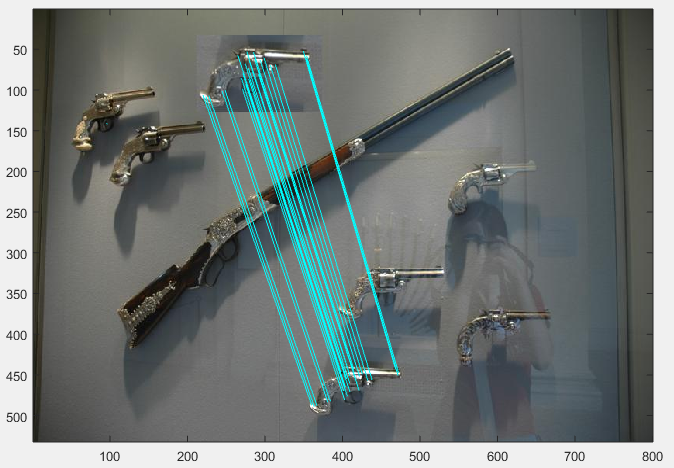
下面是个效果图:

二、检测步骤
1、提取SIFT关键点和特征描述子;
2、关键点匹配;
3、结果显示。
三、详细步骤
1、提取SIFT关键点和特征描述子
提取SIFT的关键点:
P = ( p 1 , p 2 , p 3 , . . . , p n ) P=\left( { p }_{ 1 },{ p }_{ 2 },{ p }_{ 3 },...,{ p }_{ n } \right) P=(p1,p2,p3,...,pn)
及其对应的特征描述子:
F = ( f 1 , f 2 , f 3 , . . . , f n ) F=\left( { f }_{ 1 },{ f }_{ 2 },{ f }_{ 3 },...,{ f }_{ n } \right) F=(f1,f2,f3,...,fn)
我参考的是SIFT原作者写的算法。
其对应的函数体为:
function [imageRGB, descriptors, keys] = sift(imageFile)
%%功能:读取一幅图像,并返回它的SIFT关键点信息
% 输入:
% imageFile: 图片文件名
%
% 输出:
% imageRGB: 原始图像矩阵
% descriptors: 一个kx128大小的矩阵; k是找到的关键点个数;每一行都为单位向量
% keys:一个kx4大小的矩阵, 每行包括关键点的四个值 (行数,列数,关键点尺度半径,方向角)
另外,关于SIFT的其他东西也可参考SIFT特征提取分析。
2、关键点匹配
该步是本篇的核心部分(虽然很简单,呵呵)。主要根据各特征描述子之间的欧氏距离获取相互匹配的关节点。
a、计算描述子 f 1 { f }_{ 1 } f1与其它 ( n − 1 ) (n-1) (n−1)个描述子之间的距离(一般为欧氏距离),最后得到:
D = ( d 1 , d 2 , d 3 , . . . , d ( n − 1 ) ) D=\left( { d }_{ 1 },{ d }_{ 2 },d_{ 3 },...,{ d }_{ (n-1) } \right) D=(d1,d2,d3,...,d(n−1))
b、将向量D按从小到大的顺序排列,之后得到:
D ′ = ( d 1 ′ , d 2 ′ , d 3 ′ , . . . , d ( n − 1 ) ′ ) { D }^{ ' }=\left( { d }_{ 1 }^{ ' },{ d }_{ 2 }^{ ' },{ d }_{ 3 }^{ ' },...,{ d }_{ (n-1) }^{ ' } \right) D′=(d1′,d2′,d3′,...,d(n−1)′)
如果: d 1 ′ / d 2 ′ < T { d }_{ 1 }^{ ' }/{ d }_{ 2 }^{ ' }<T d1′/d2′<T,那么可以得到与描述子 f 1 { f }_{ 1 } f1匹配的关键点 p j { p }_{ j } pj(此时的 d 1 ′ 对 { d }_{ 1 }^{ ' }对 d1′对应描述子 f 1 { f }_{ 1 } f1与描述子 f j { f }_{ j } fj之间的距离),并将关键点 p 1 { p }_{1 } p1加入到点集 A A A中,将关键点 p j { p }_{ j } pj加入到点集 B B B中;
否则:进行步骤c。
c、对于描述子 f 2 { f }_{ 2} f2~ f n { f }_{ n } fn,重复步骤a、b。
其对应的主要代码如下:
%循环找匹配点
for i = 1 : size(des,1)
%求行向量des(i,:) 与矩阵des中每一行向量的欧几里得距离
distance_I_other = distanceVectorMatrix(des(i,:),des);
%将算的结果按从小到大排序
[vals,indx] = sort(distance_I_other);
%求匹配特征点
if (vals(2) < threshold * vals(3))
match(i) = indx(2);%如果特征点i与其它特征点的最近 距离和次最近距离的比值小于阈值threshold的话,
else %就认为这个最近距离的特征点 indx(2)与特征点i匹配。
match(i) = 0; %这里舍去了indx(1)是因为该点代表特征点i自身
end
end
3、将点集 A A A与点集 B B B中对应的点用线连起来即可。
该步主要利用MATLAB中的函数”line“
其对应的主要代码如下:
for i = 1: size(des,1)
if (match(i) > 0)
%line([起点横坐标,终点横坐标],[起点纵坐标,终点纵坐标],...),
line([loc(i,2) loc(match(i),2)], [loc(i,1) loc(match(i),1)], 'Color', 'c');
end
end
最后,再来两个实例测试一下:
















 9243
9243

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









