






基于MPC的永磁同步电机非线性终端滑模控制仿真研究
matlab simulink
无参考文件
ID:7588745054164734
机器人与机械臂控制
MPC(Model Predictive Control)是一种基于模型预测的控制方法,被广泛应用于各种控制系统中。本文将围绕基于MPC的永磁同步电机非线性终端滑模控制展开仿真研究,使用Matlab Simulink工具进行仿真分析。
首先,我们来介绍MPC控制方法。MPC通过对系统模型进行建模,预测系统未来一段时间的状态,然后通过优化算法计算出最优控制信号。由于能够考虑到系统约束条件和未来状态的不确定性,MPC具有较好的控制性能和鲁棒性。
在永磁同步电机控制中,传统的线性控制方法存在一定的局限性,例如对于非线性系统的控制效果不佳。因此,本文采用非线性终端滑模控制方法来提高永磁同步电机的控制质量。
终端滑模控制是一种较新的控制方法,它通过引入一个终端滑模面,实现对系统状态的全局控制。相比于传统滑模控制方法,终端滑模控制能够克服系统存在的终端区域误差,提高控制精度和稳定性。
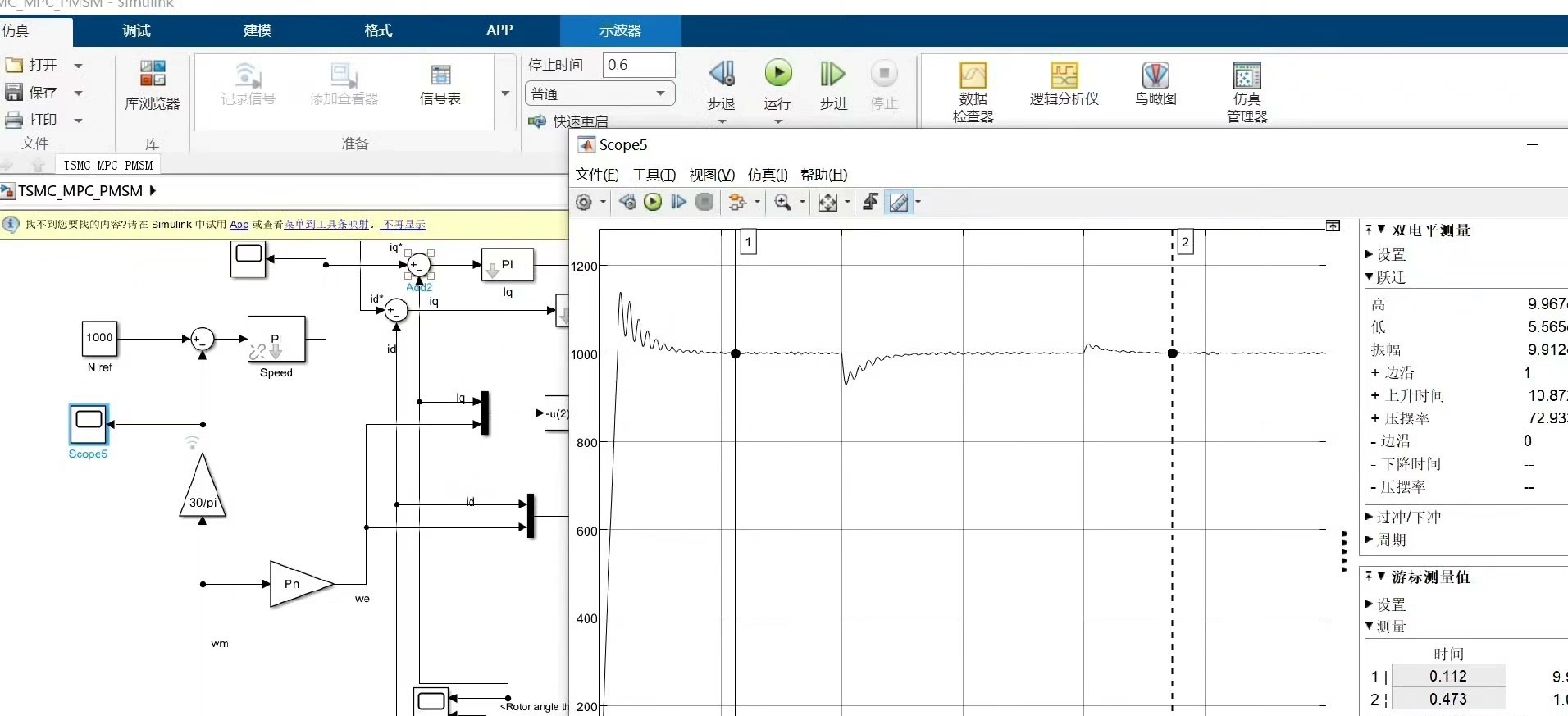
在本文中,我们首先建立永磁同步电机的非线性数学模型,并通过Matlab Simulink进行仿真实验。基于MPC的终端滑模控制算法将被应用于永磁同步电机的控制中,根据系统模型预测未来一段时间的状态,并通过优化算法计算出最优控制信号。
仿真结果显示,基于MPC的终端滑模控制在永磁同步电机控制中能够有效改善系统的性能。通过引入终端滑模面,控制器能够实现对系统状态的全局控制,提高系统的响应速度和稳定性。与传统的线性控制方法相比,基于MPC的终端滑模控制具有更好的鲁棒性和抗干扰能力。
此外,本文还分析了MPC控制器参数对系统性能的影响。通过调整预测模型的权重参数和控制器的惩罚系数,可以进一步优化系统的控制性能。实验结果表明,通过合理选择控制器参数,基于MPC的终端滑模控制能够实现更好的系统响应。
综上所述,本文通过Matlab Simulink进行了基于MPC的永磁同步电机非线性终端滑模控制仿真研究。通过引入终端滑模面,该控制方法能够提高永磁同步电机的控制性能和稳定性。进一步的研究可以扩展到实际硬件平台上,验证仿真结果的可行性。这将为永磁同步电机的控制提供一种新的思路和方法。
【相关代码,程序地址】:http://fansik.cn/745054164734.html
















 327
327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









