






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种高性能、高效率的电机,常用于工业和交通领域。在控制永磁同步电机时,模型预测控制(Model Predictive Control,MPC)和非线性终端滑模控制(Nonlinear Terminal Sliding Mode Control,NTSMC)是两种常见的控制策略。
MPC是一种基于系统模型的控制方法,它通过对系统未来状态进行预测,并优化控制输入,以使系统达到期望的性能指标。MPC在永磁同步电机控制中的应用可以提高系统的动态响应和鲁棒性。
NTSMC是一种基于滑模控制的方法,它通过引入终端滑模面来实现系统的快速跟踪和鲁棒性控制。NTSMC在永磁同步电机控制中的应用可以提高系统的稳定性和抗干扰能力。
将MPC和NTSMC相结合,可以充分发挥它们各自的优势,提高永磁同步电机的控制性能。在仿真研究中,可以建立永磁同步电机的数学模型,并基于该模型设计MPC和NTSMC控制器。通过对比不同控制策略的仿真结果,可以评估它们在永磁同步电机控制中的性能优劣。
基于模型预测控制MPC的永磁同步电机非线性终端滑模控制是一种值得研究的控制策略,它可以提高永磁同步电机的控制性能和鲁棒性。在实际应用中,还需要考虑系统的实时性和计算复杂度等因素。
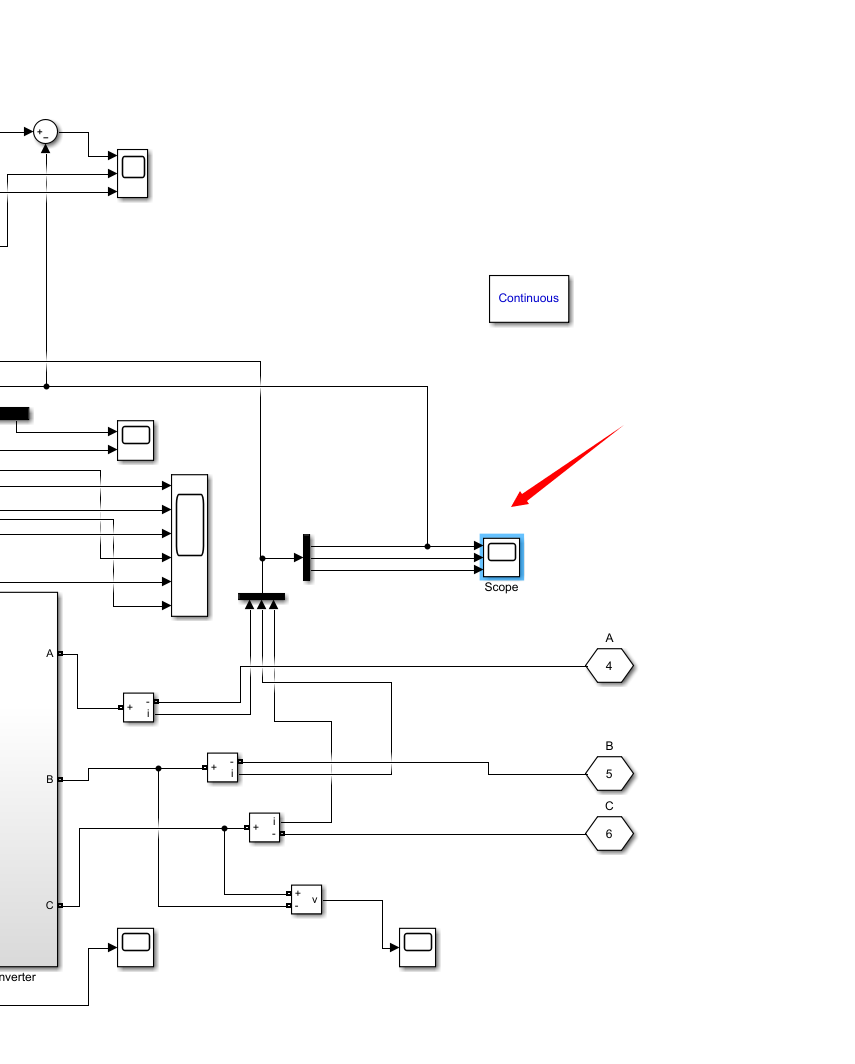
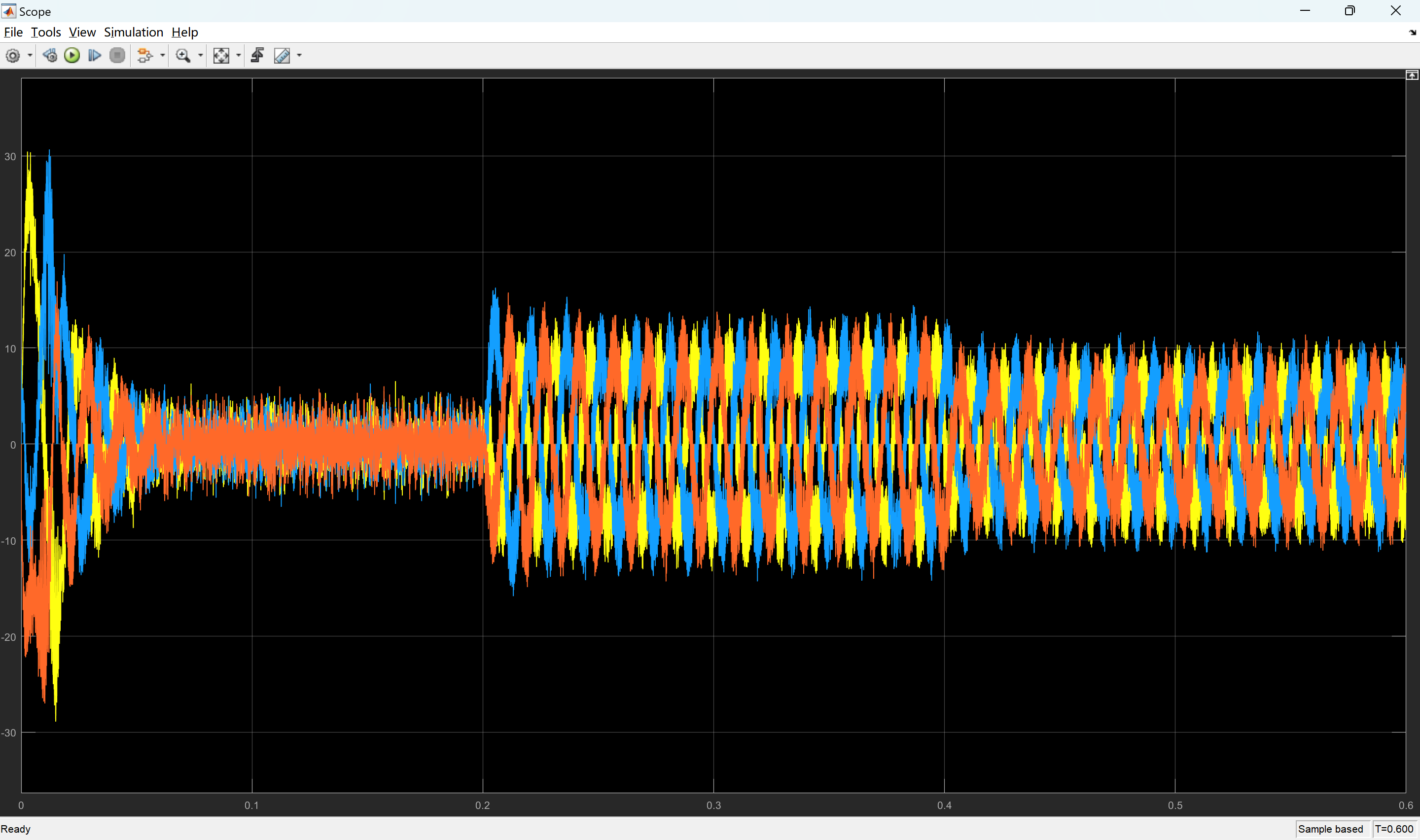
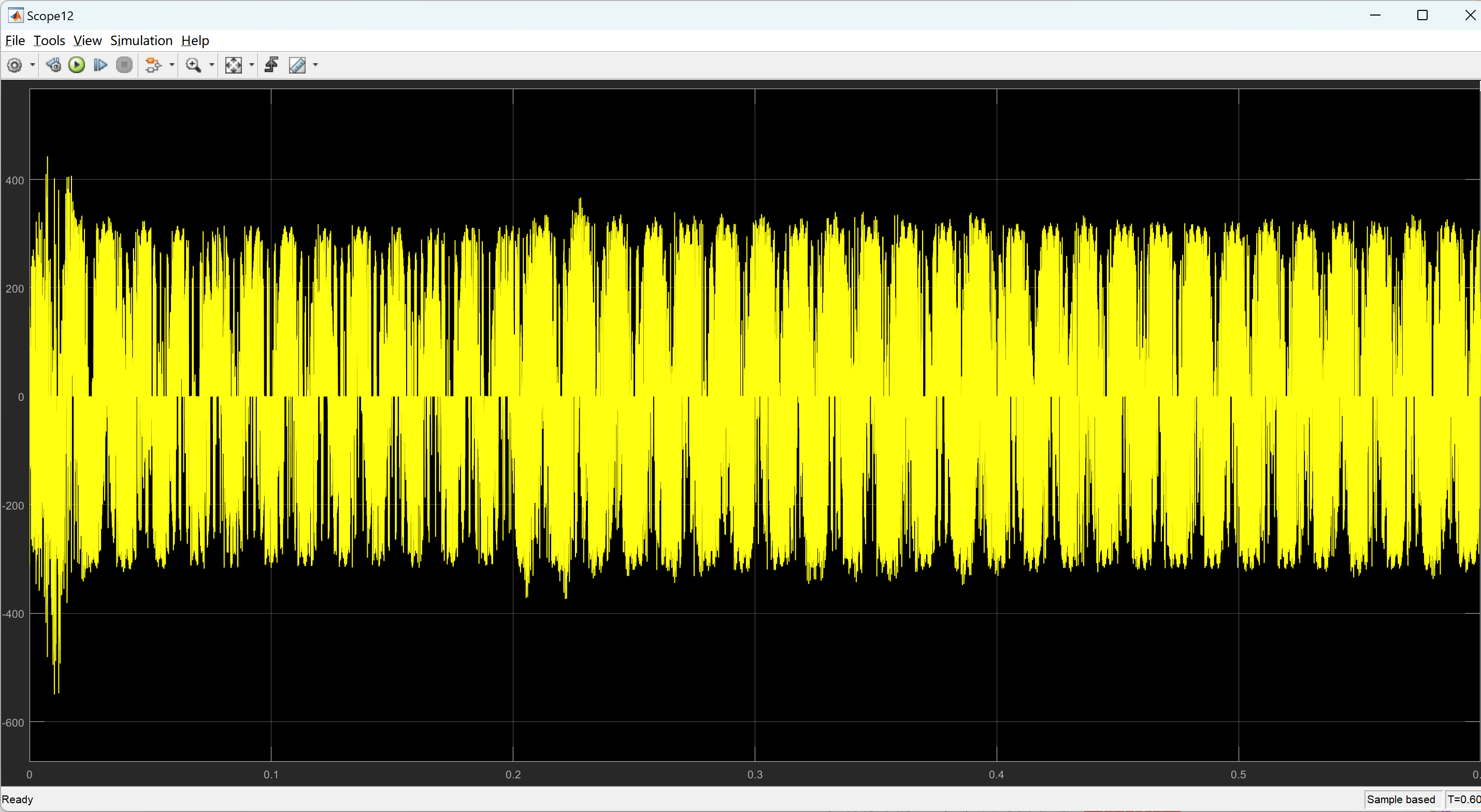
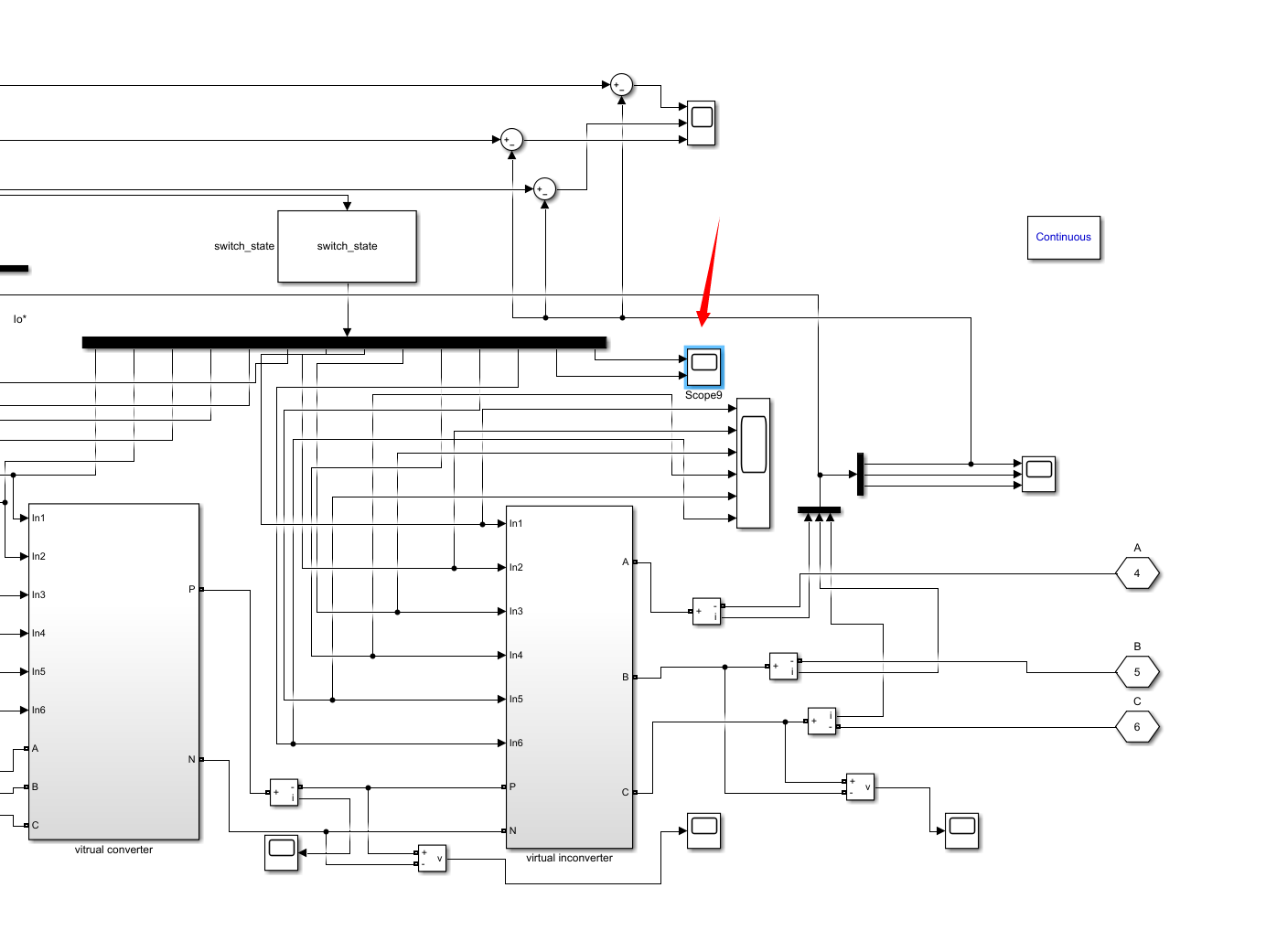
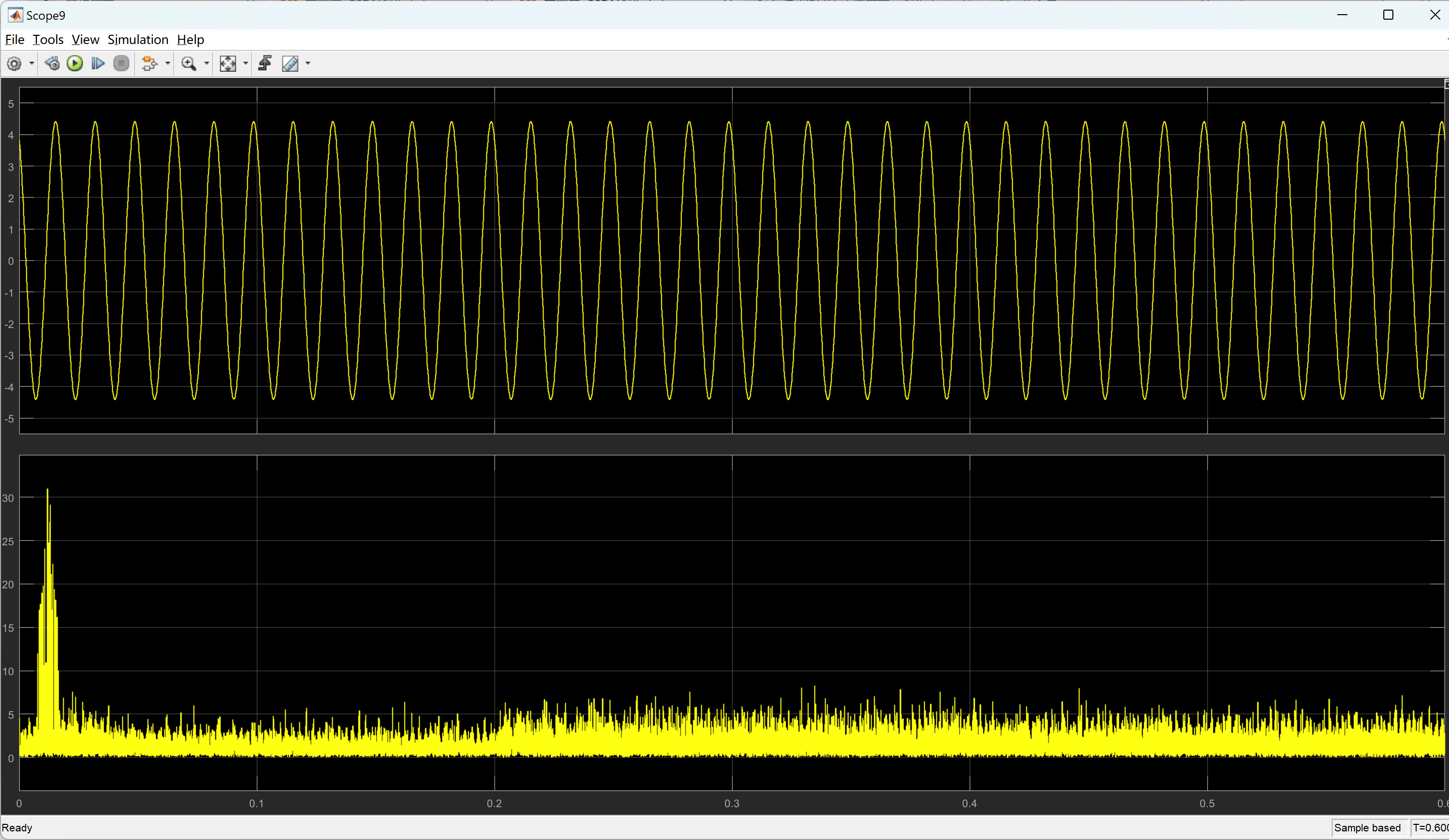
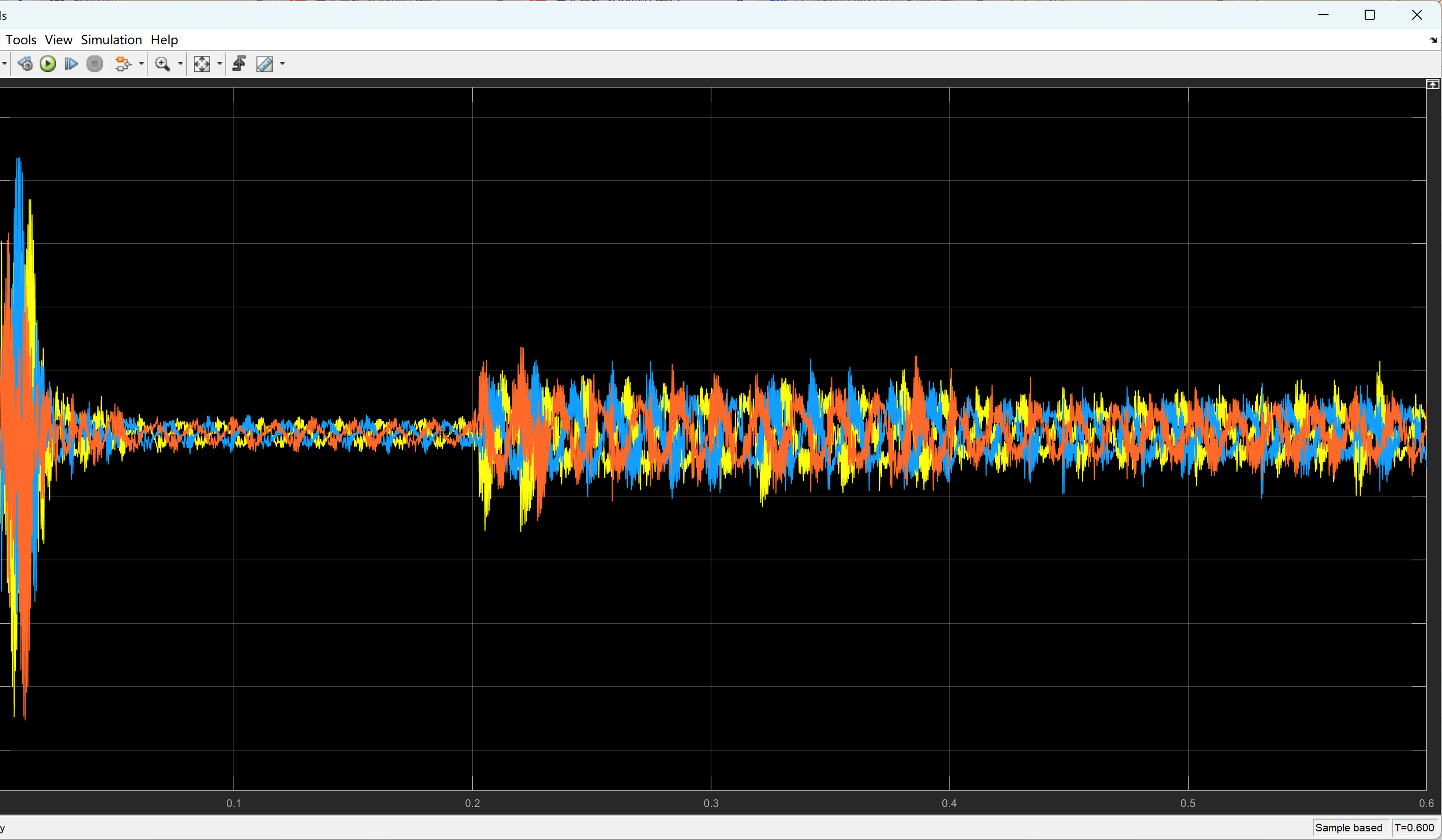
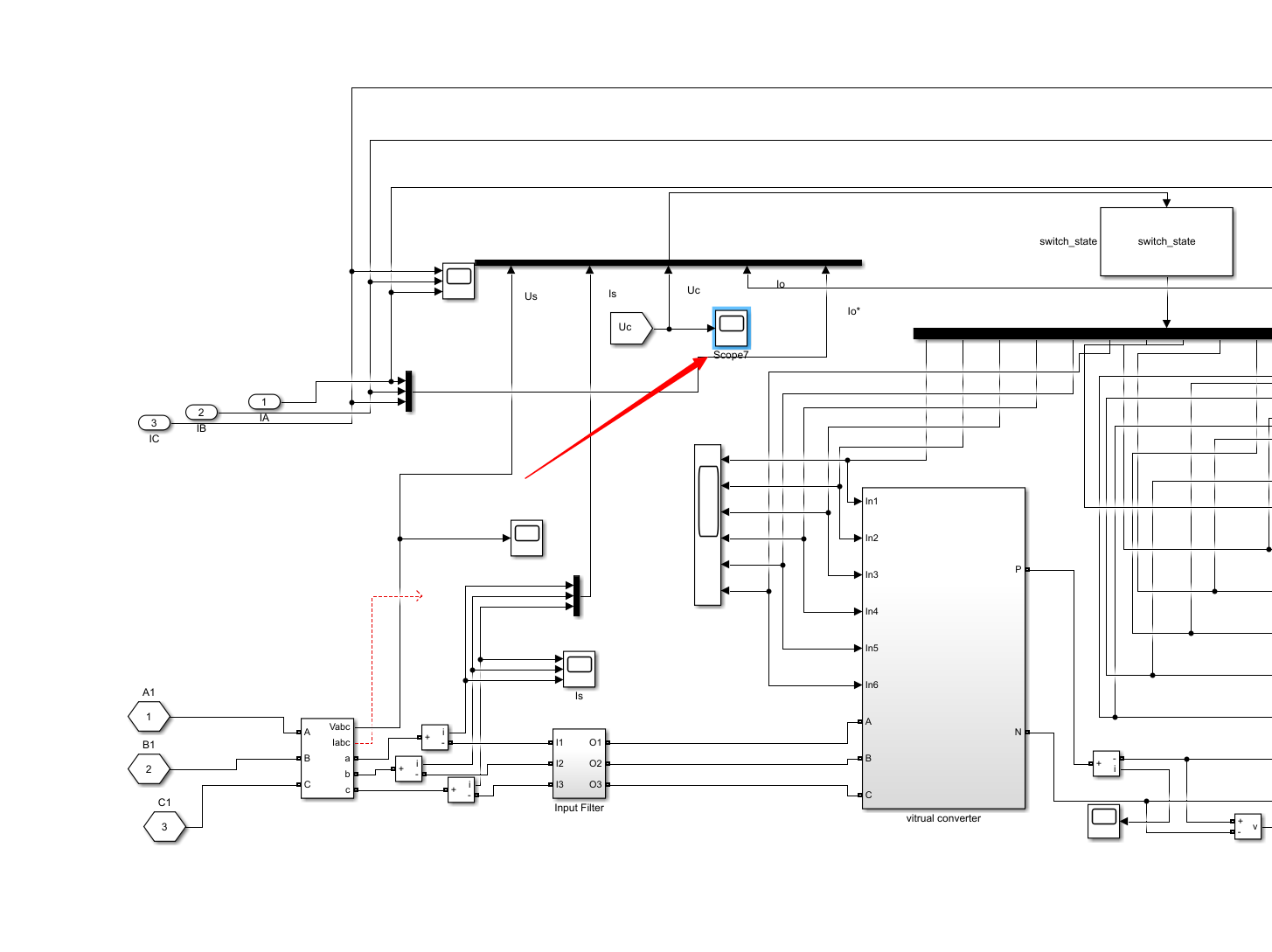
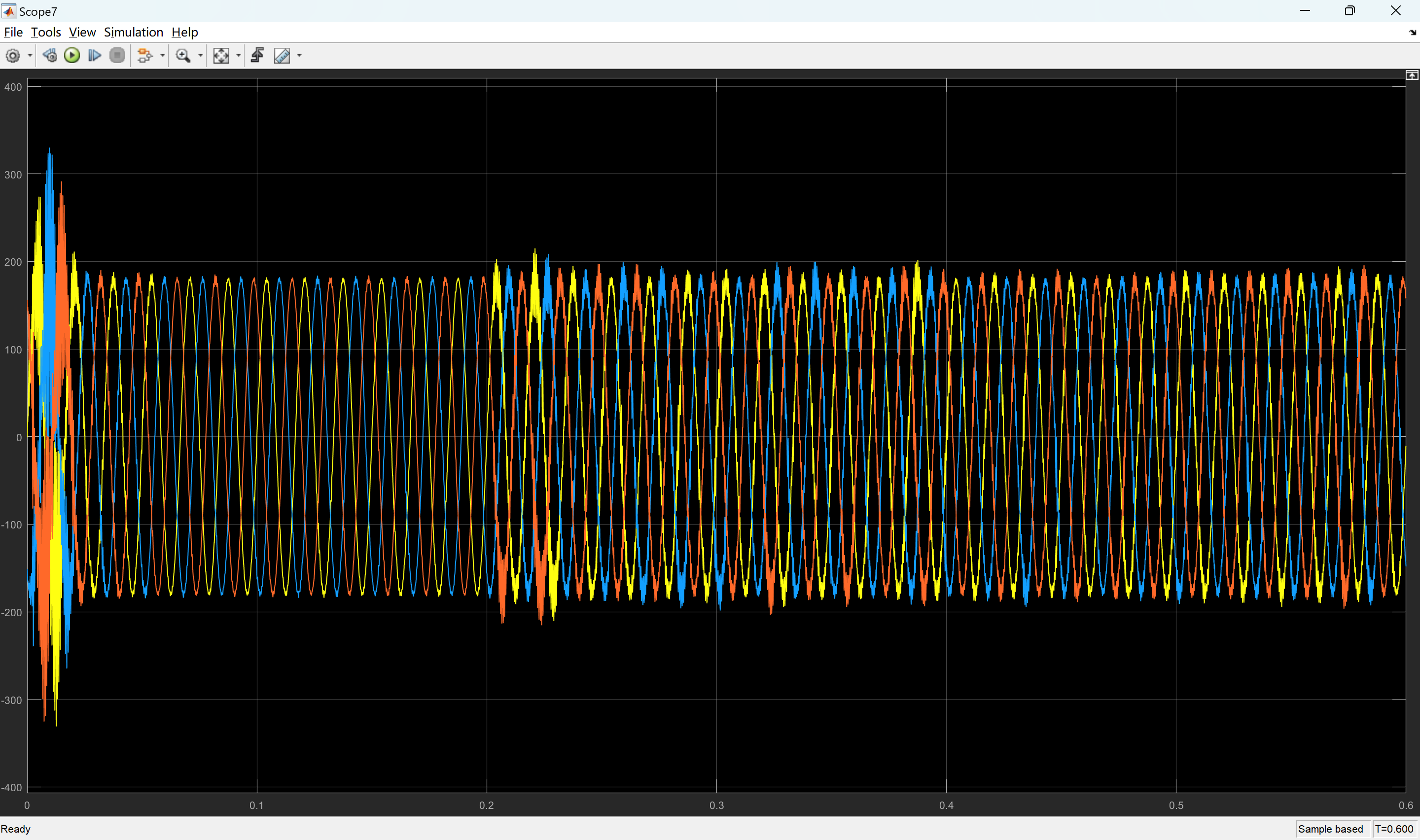
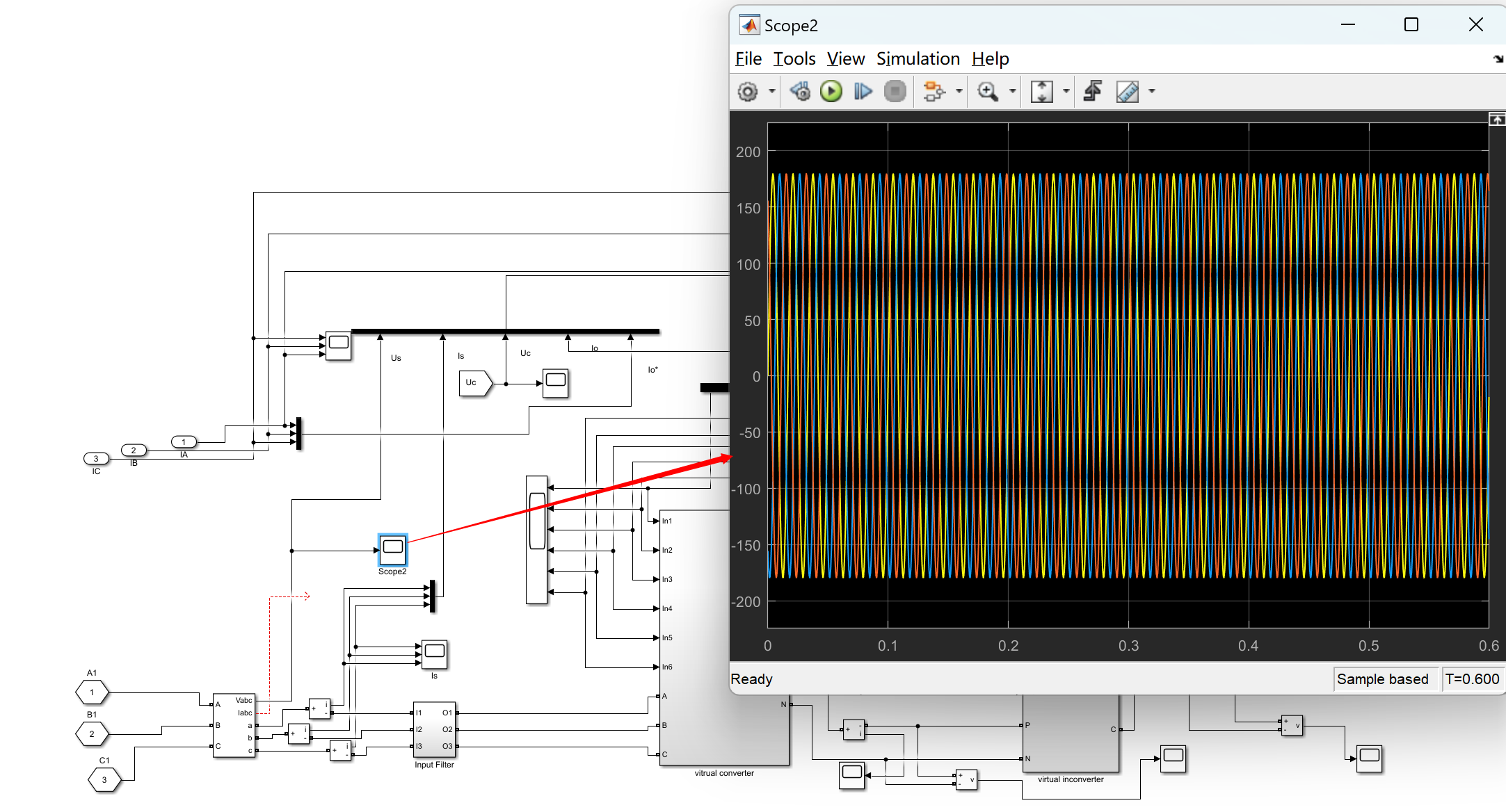
📚2 运行结果



部分代码:
function [sys,x0,str,ts] = get_sita_u(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=[];
case 9,
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
% mdlInitializeSizes
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0.00001 0]; % 采样时间0.002s,500 Hz
% mdlOutputs
function sys=mdlOutputs(t,x,u)
global Id_g Iq_g sita_e_g
global sita_u_g
global faid_g faiq_g Ld Lq L flux
Id_g=u(2);Iq_g=u(1); sita_e_g=u(3);
Ld=L;Lq=L; L=0.000395;flux=0.1827;
faid_g=flux+Ld*Id_g;
faiq_g=Lq*Iq_g;
sita_u_g=sita_e_g+atan(faiq_g/faid_g)+pi/2;
sys(1)=sita_u_g;
function [sys,x0,str,ts] = get_sita_u(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=[];
case 9,
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
% mdlInitializeSizes
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0.00001 0]; % 采样时间0.002s,500 Hz
% mdlOutputs
function sys=mdlOutputs(t,x,u)
global Id_g Iq_g sita_e_g
global sita_u_g
global faid_g faiq_g Ld Lq L flux
Id_g=u(2);Iq_g=u(1); sita_e_g=u(3);
Ld=L;Lq=L; L=0.000395;flux=0.1827;
faid_g=flux+Ld*Id_g;
faiq_g=Lq*Iq_g;
sita_u_g=sita_e_g+atan(faiq_g/faid_g)+pi/2;
sys(1)=sita_u_g;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]田桠楠,夏鲲.基于滑模观测器的永磁同步电机模型预测电流控制研究[J].机电工程, 2017, 34(10):6.DOI:10.3969/j.issn.1001-4551.2017.10.015.
[2]许波.无轴承永磁同步电机无位置传感器及控制研究[D].江苏大学,2013.DOI:10.7666/d.Y2445008.
[3]郑江平,李超.基于MPC的永磁同步电机最优滑模控制[J].计算机应用与软件, 2018, 35(7):6.DOI:10.3969/j.issn.1000-386x.2018.07.007.
[4]靳宇星.基于分数阶转速调节器的永磁同步电机模型预测控制系统研究[D].兰州交通大学[2023-10-27].DOI:CNKI:CDMD:2.1017.233451.

















 166
166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











