







 本文介绍了工控软件的驱动框架,包括串口(ModBus RTU)、网口(自定义协议)以及PCI主站卡的通信类型。通过详细讲解如何构建命令、解析响应和进行CRC校验,阐述了不同通信方式的实现细节。同时,概述了Windows下串口和网口的主要通信函数及其使用场景。
本文介绍了工控软件的驱动框架,包括串口(ModBus RTU)、网口(自定义协议)以及PCI主站卡的通信类型。通过详细讲解如何构建命令、解析响应和进行CRC校验,阐述了不同通信方式的实现细节。同时,概述了Windows下串口和网口的主要通信函数及其使用场景。
驱动框架
常规工控软件中,驱动为最底层的逻辑,与硬件直接进行通信。各家设计不同,我只阐述我们软件平台的驱动框架,也许可给读者一点灵感。
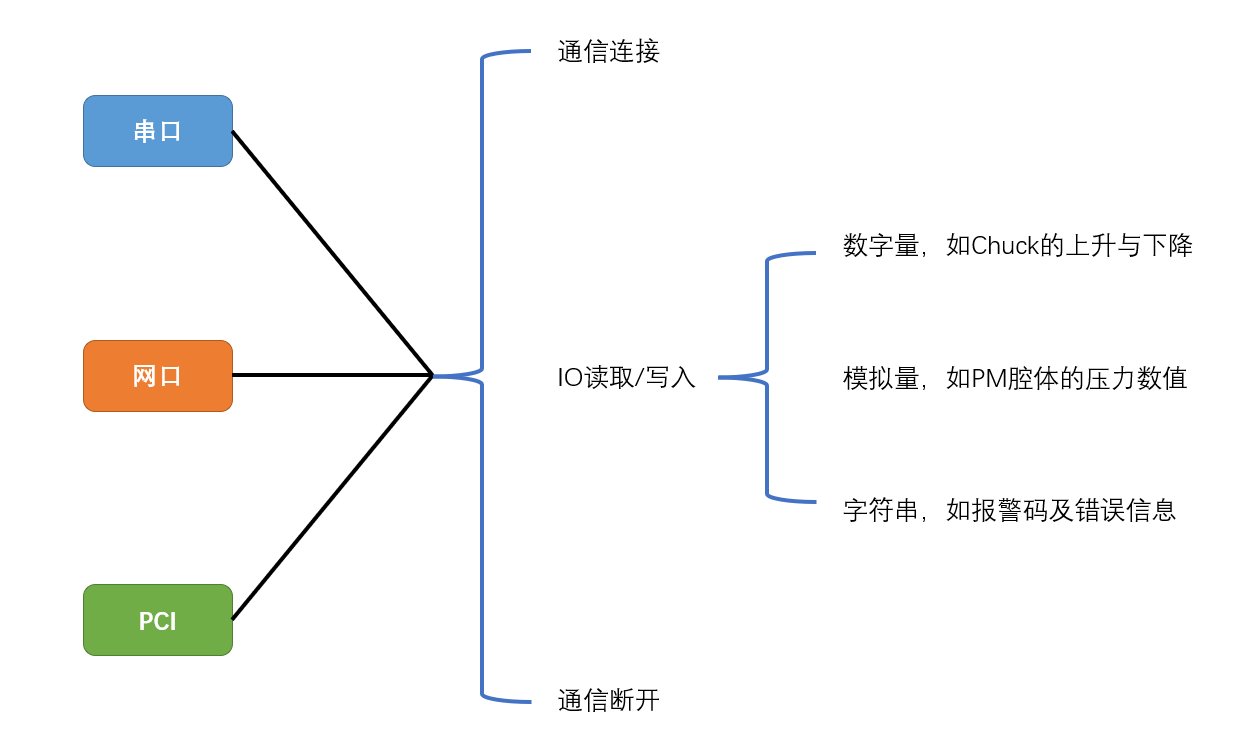
一般情况下,这三种通信方式足够了。无论是对于CVD镀膜设备,还是匀胶显影等机台,MFC可能走串口,机器人可能走网口,IO模块可能走赫优讯板卡,台达板卡,倍福板卡等等,但都是走PCI卡槽。
通信类型举例
串口(ModBus RTU):
- 根据ModBus RTU协议构建发送命令。
- 根据ModBus RTU协议解析返回命令。
- 构建函数进行CRC计算和校验。
- 根据协议中结束符来对命令进行操作和检查。
如:从机地址为2,保持寄存器从1开始,读取连续三个寄存器的内容。
发:

收:

网口(自定义协议):
自定义协议的难易程度不好说,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 537
537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









