







智能控制—工业机器人及智能控制技术
在实现智能制造的过程中,制造系统的自动化水平代表一个国家制造业发达程度。智能控制是指在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。(特征:机器换人)
1)数控加工设备
2)工业机器人
3)生产线自动化控制设备(智能控制器、智能终端、智能识别等)
1、工业机器人
工业机器人是一种能自动控制,可重复编程,多功能、多自由度的操作机,能搬运材料、工件或操持工具,完成各种作业。(国际标准化组织(1SO))
1、特点:
特定的机械机构
一种模拟人手臂、手腕和手功能的机电一体化装置;其动作具有类似于人或其他生物的某些器官(肢体、感受等)的功能。
可编程,具有通用性
可完成多种工作、任务,可灵活改变动作程序.
拟人化,具有不同程度的智能
如记忆、感知、推理、决策、学习等。
独立性
完整的机器人系统在工作中可以不依赖人的干预。
2、 工业机器人的主要应用场合:
1)恶劣、危险的工作场合。
2)特殊作业场合。
3)自动化生产领域**。(智能制造的主要使用领域)
3、工业机器人的组成及技术参数
- 工业机器人是一种可以模拟人的手臂、手腕及其功能的机电一体化装置。
- 从结构上分:机器人本体、控制器与控制系统和示教器这三大部分。
- 从功能系统上分:执行机构、控制系统、驱动系统和传感系统四部分组成。
1、执行机构(也叫操作机,由一系列连杆和关节或其他形式的运动副所组成,是完成各种作业任务的执行机构)

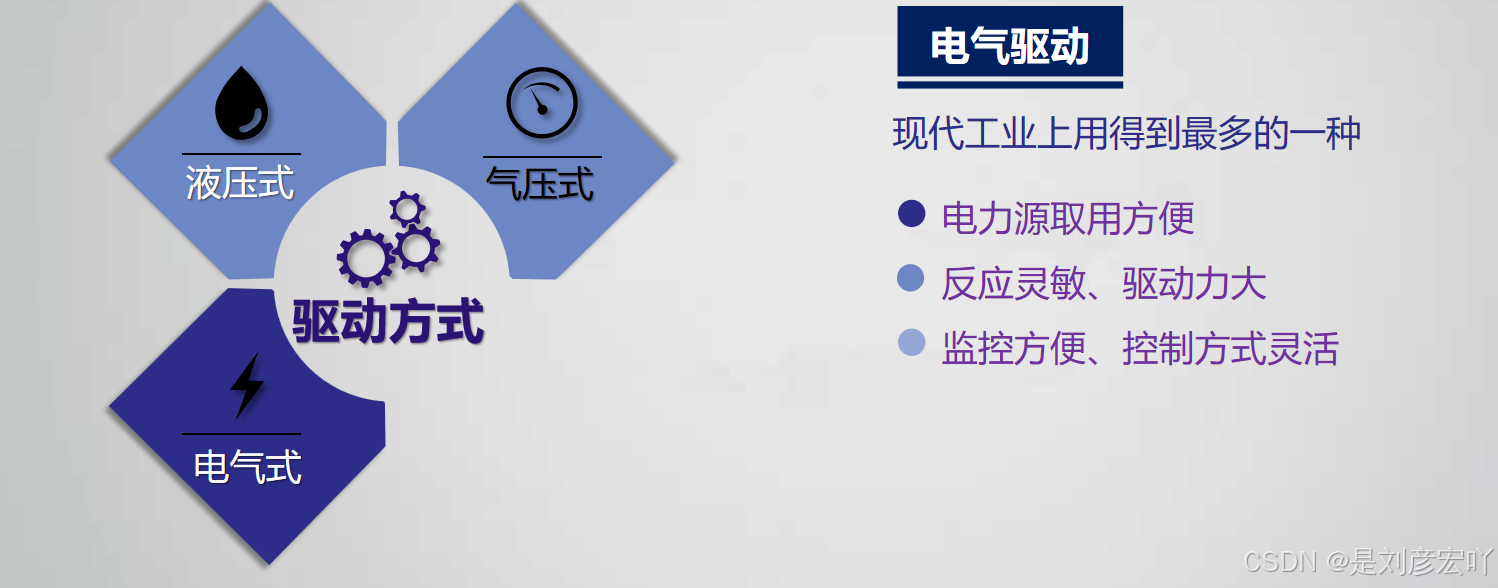
2、驱动系统
(动力传动转置,向机器人各机械臂提供动力和运动的装置)
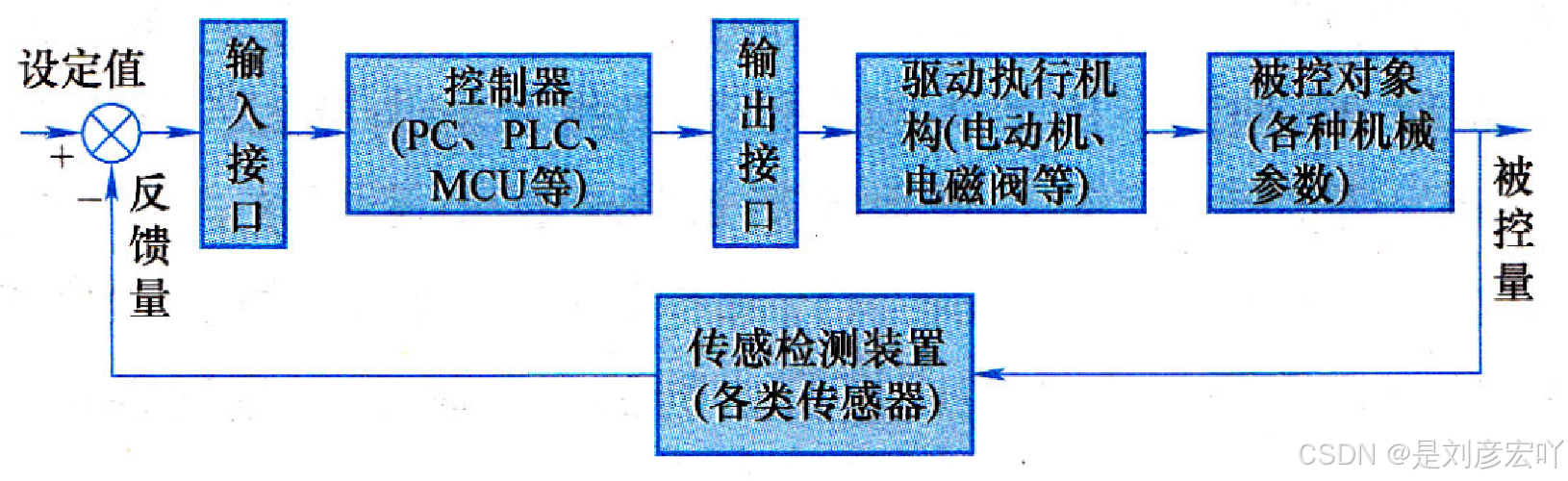
3、控制系统
(工业机器人的神经中枢或控制中心,由计算机硬件、软件和一些专用电路、控制器、驱动器等构成)
工业机器人的技术参数:
(主要技术参数:自由度、定位精度和重复定位精度、分辨率、工作空间、最大运动速度和承载能力等。)

按操作机的运动特征分类(坐标特性):
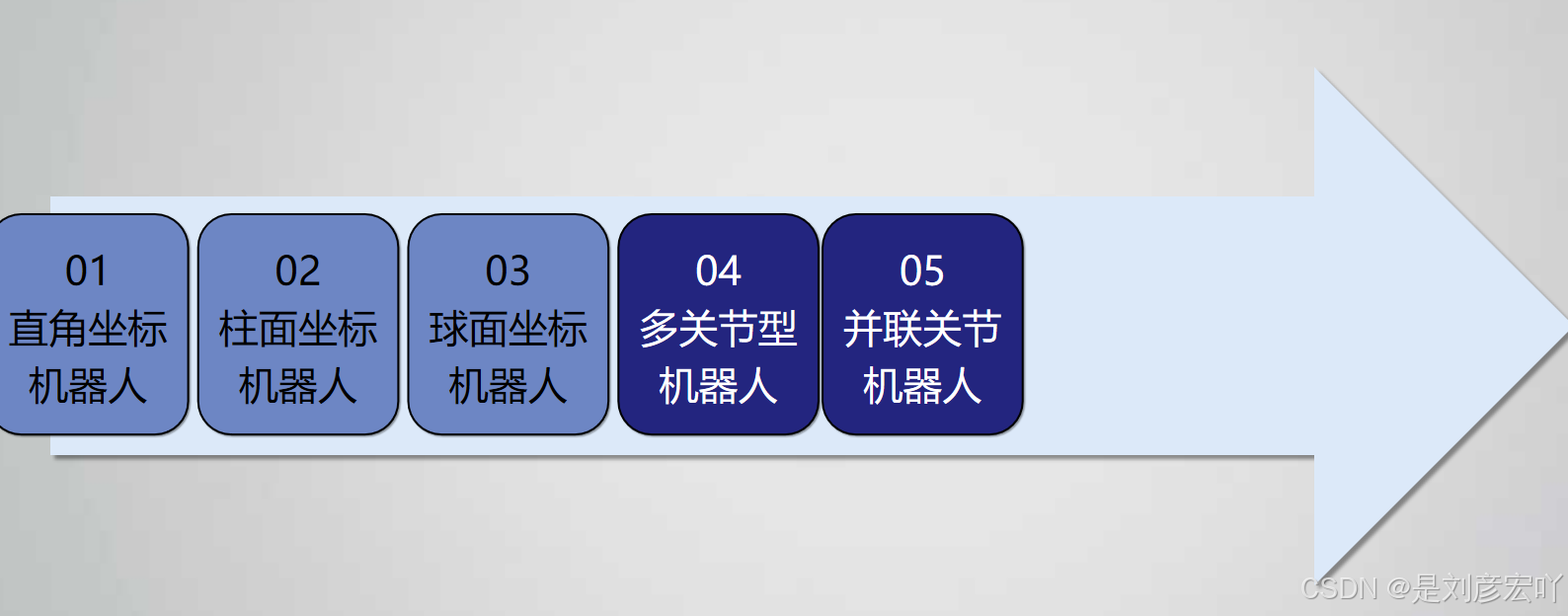
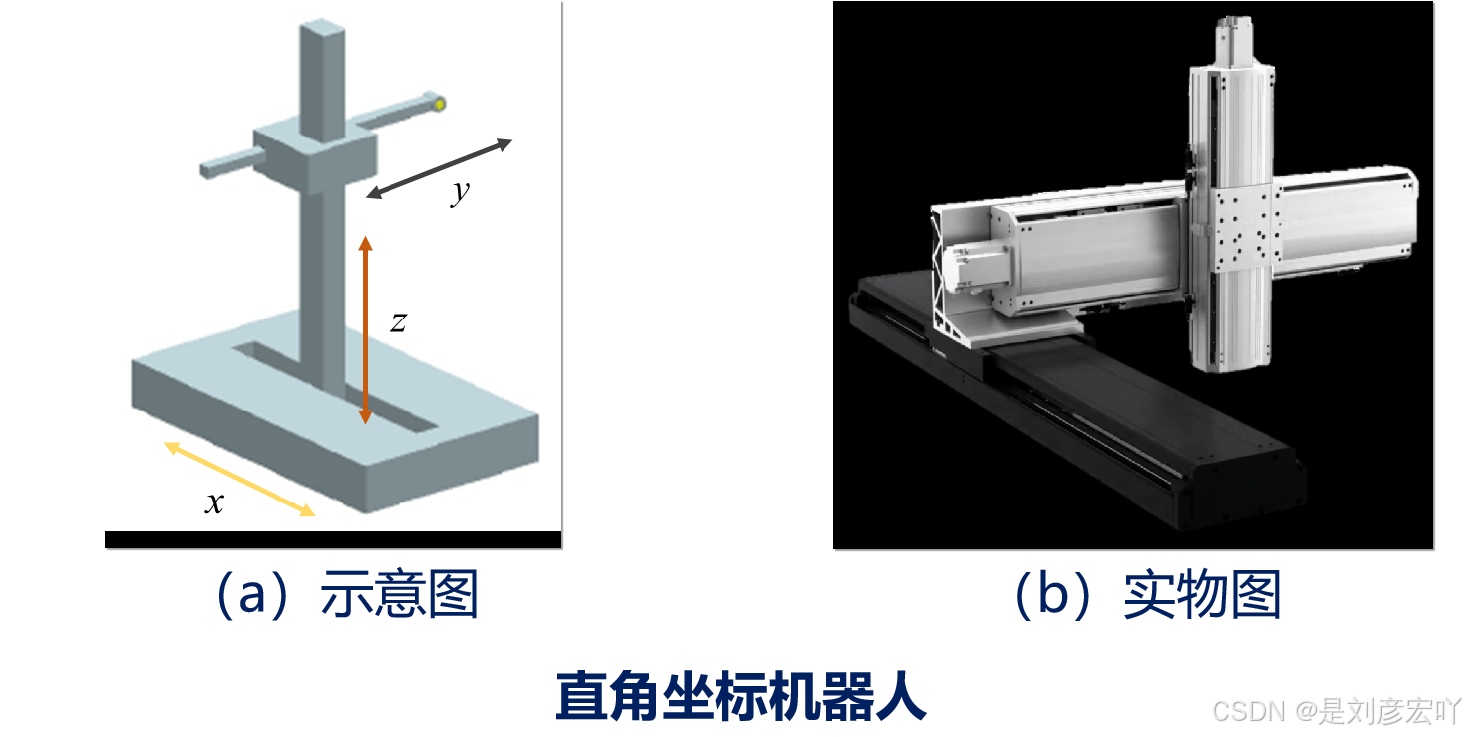
- 直角坐标机器人具有空间上相互垂直的多个直线移动轴,通常为3个轴,如图所示,通过直角坐标方向的3个独立自由度确定其手部的空间位置,其动作空间为一长方体。
- 柱面坐标机器人主要由旋转基座、垂直移动和水平移动轴构成,R、θ和Z为坐标系的三个坐标,具有一个回转和两个平移自由度,其动作空间呈圆柱形。著名的Versatran机器人就是典型的柱面坐标机器人。

- 球面坐标机器人又称为极坐标型机器人,结构如图所示,R、θ和β为坐标系的三个坐标,具有平移、旋转和摆动三个自由度,动作空间形成球面的一部分。其机械手能够作前后伸缩移动、在垂直平面上摆动以及绕底座在水平上转动。著名的Unimate机器人就是这种类型的机器人。

- 多关节型机器人由多个旋转和摆动机构组合而成。其摆动方向主要有铅锤方向和水平方向两种,因此这类机器人又可分为垂直多关节机器人和水平多关节机器人。

优点:可以自由地实现三维空间地各种姿势,可以生成各种复杂形状地轨迹,且动作范围很宽;缺点:结构刚度较低,动作的绝对位置精度较低。
优点:可以自由地实现三维空间地各种姿势,可以生成各种复杂形状地轨迹,且动作范围很宽;缺点:结构刚度较低,动作的绝对位置精度较低。 - 并联机器人是近些年来发展起来的一种由固定机座和具有若干自由度的末端执行器、以不少于两条独立运动链连接形成的新型机器人。

特点:无累积误差,精度较高;速度高,动态响应好;结构紧凑,刚度高,承载能力大;具有较好的各向同性工作空间较小
5、工业机器人工作站
是指使用一台或多台机器人,配以相应的周边设备,用于完成某一特定工序作业的独立生产系统,也可称为机器人工作单元
构成:机器人及其控制系统、辅助设备及其他周边设备
末端执行器等辅助设备及其他周边设备则随应用场合和工件特点的不同存在着较大差异,因此这里只阐述一般工作站的构成和设计原则。
工作站的设计是一项较为灵活多变、关联因素甚多的技术工作,若将共同因素抽象出来,可得出一般的设计原则。
设计原则:
(1)设计前必须充分分析作业对象,拟定最合理的作业工艺。
(2)必须满足作业的功能要求和环境条件。
(3)必须满足生产节拍要求。
(4)整体及各组成部分必须全部满足安全规范及标准。
(5)各设备及控制系统应具有故障显示及报警装置。
(6)便于维护修理。
(7)操作系统应简单明了,便于操作和人工干预。
(8)操作系统便于联网控制。
(9)工作站便于组线。
(10)经济实惠,快速投产。

6、工业机器人生产线
是由两个或两个以上的工业机器人工作站、物流系统和必要的非工业机器人工作站组成,完成一系列以工业机器人作业为主的连续生产自动化系统。
构成:
1.工业机器人工作站
2.非工业机器人工作站
3.工业机器人子生产线
4.中转仓库
5.物流系统
6.动力系统
7.控制系统
8.辅助设备及安全装置
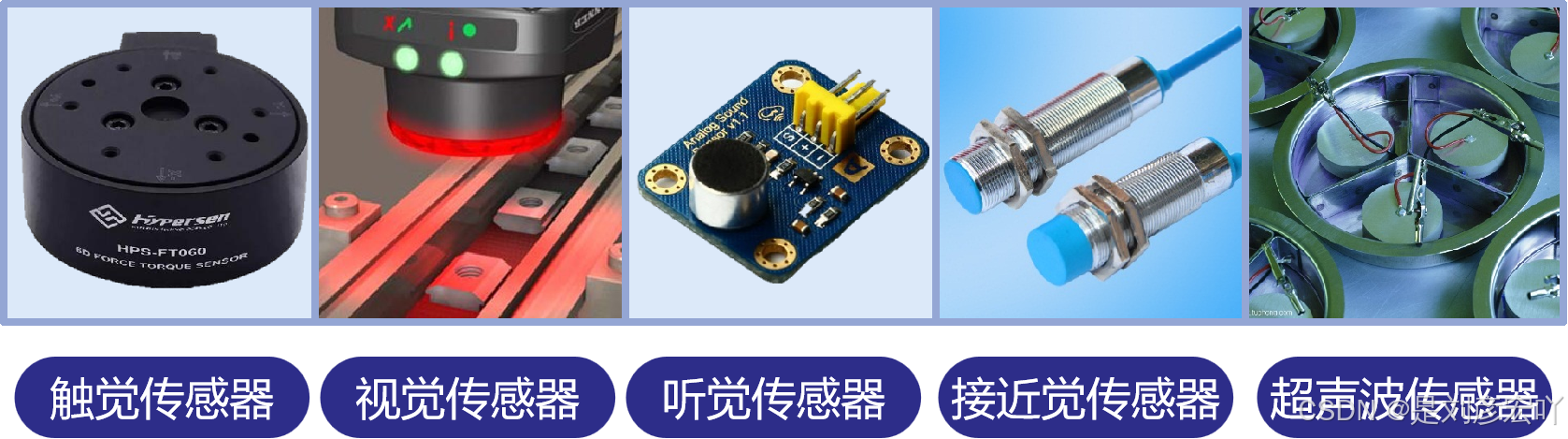
2、传感系统
(传感器是用来检测作业对象及外界环境,将感知的信息传递给机器人控制器)
智能控制是智能制造的基础之一。在整个控制系统中,控制器居于系统的核心地位。
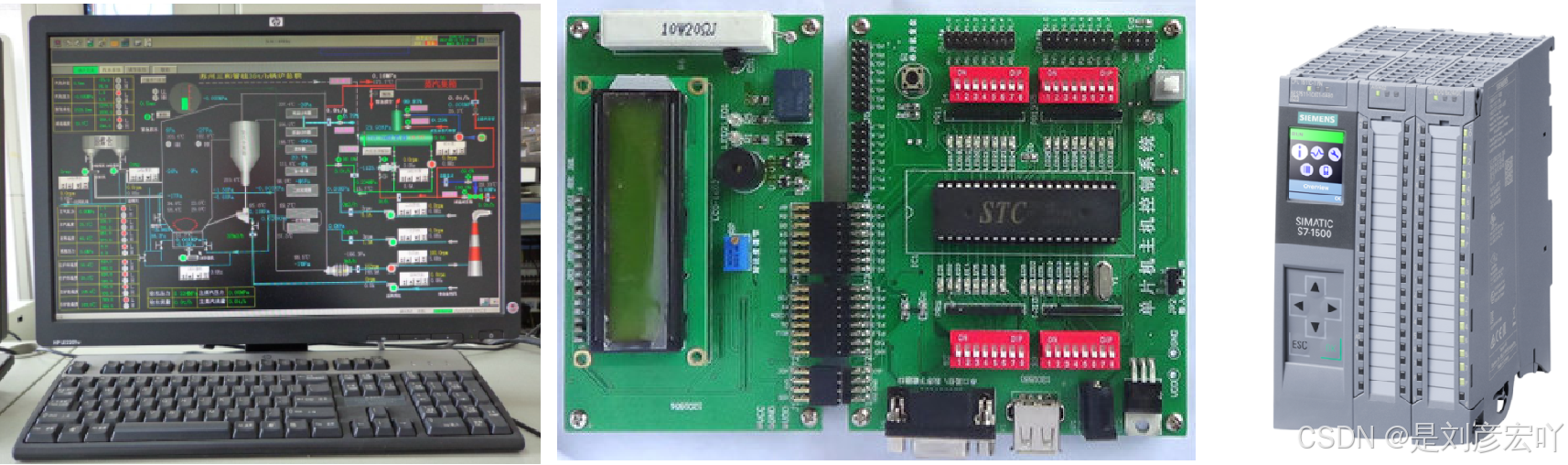
分类:
(1)基于个人计算机(PC)的控制系统:工业控制计算机加工业I/O接口板。
(2)基于微处理器(MCU)的控制系统:包括单片机、嵌入式处理器和数字信号处理器(DSP)。
(3)基于可编程序控制器(PLC)的控制系统:顺序控制。
(4)其他控制系统:包括数控系统(NCS)、集散控制系统(DCS)和现场总线系统(FCS)等。
PLC控制器特点:
(1)编程方法简单。
(2)功能强、性能价格比高。
(3)硬件配套齐全,用户使用方便,适应性强。
(4)可靠性高,抗干扰能力强。
(5)系统的设计、安装、调试工作量少。
(6)维修工作量小,维修方便。
(7)体积小、能耗低。
PLC已被广泛应用于各种生产机械和生产过程的自动控制中,成为一种最重要、最普及、应用场合最多的工业控制装置,被公认为现代工业自动化的三大支柱(PLC、机器人、CAD/CAM)之一。其应用的深度和广度成为衡量一个国家工业自动化程度的标志。
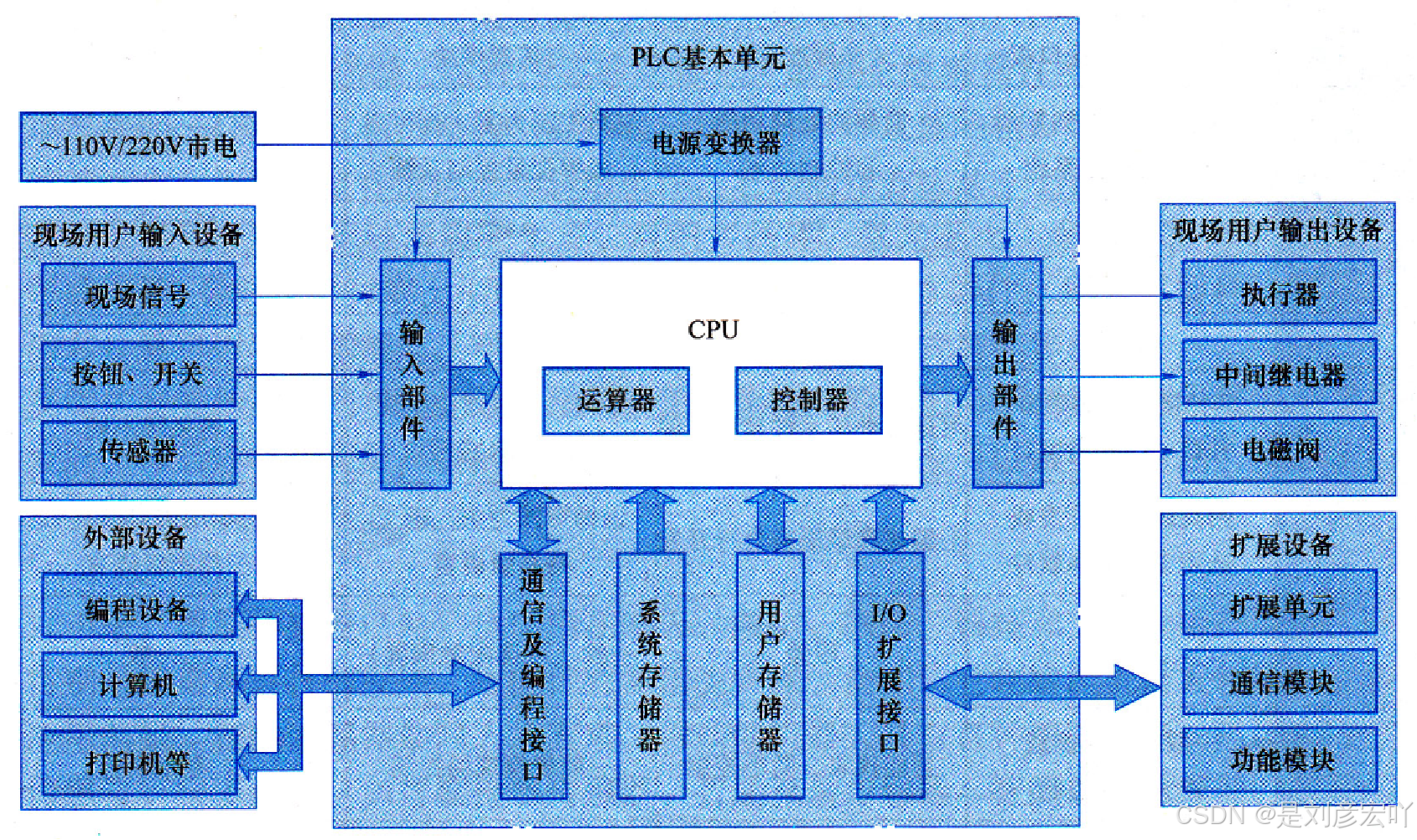
PLC的基本结构:
1、CPU
2、储存器
3、I/O单元
4、电源
5、外部设备
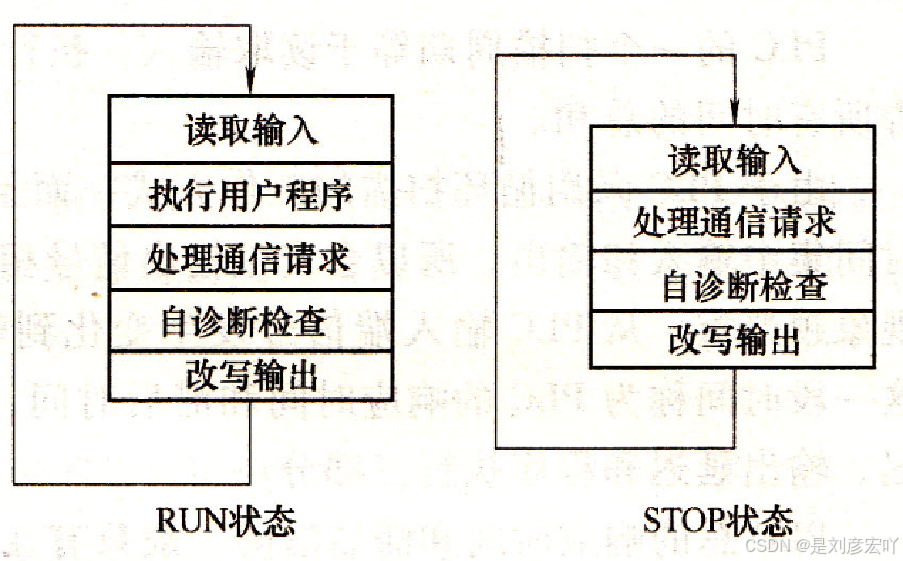
PLC的工作原理:
PLC在确定了工作任务,装入了专用程序后,成为一种专用机。它采用循环扫描工作方式,系统工作任务管理及应用程序执行都是通过循环扫描方式完成的.
应用:PLC不仅用于开关量控制,还用于模拟量及数字量的控制,可采集与存储数据,还可对控制系统进行监控;还可联网、通讯,实现大范围、跨地域的控制与管理。
1、开关量的逻辑控制
2、模拟量控制
3、运动控制
4、过程控制
5、数据处理
6、通信及联网
3、 智能终端是一类智能化和网络化的嵌入式计算机系统设备
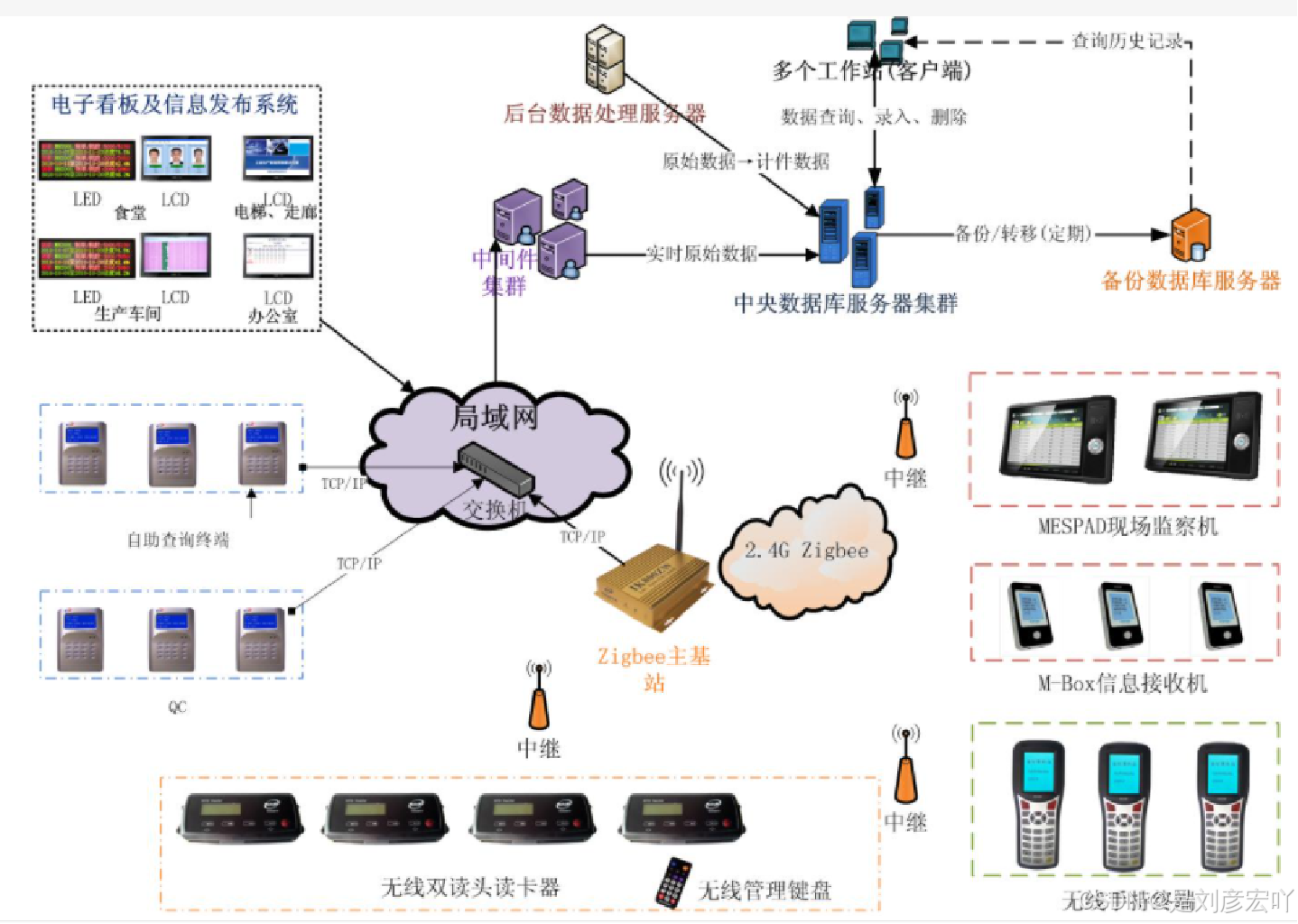
智能终端体系结构分为硬件系统和软件结构。
- 硬件:由运算器、控制器、存储器、输入设备和输出设备五大部件组成。
- 计算机软件结构:系统软件和应用软件。

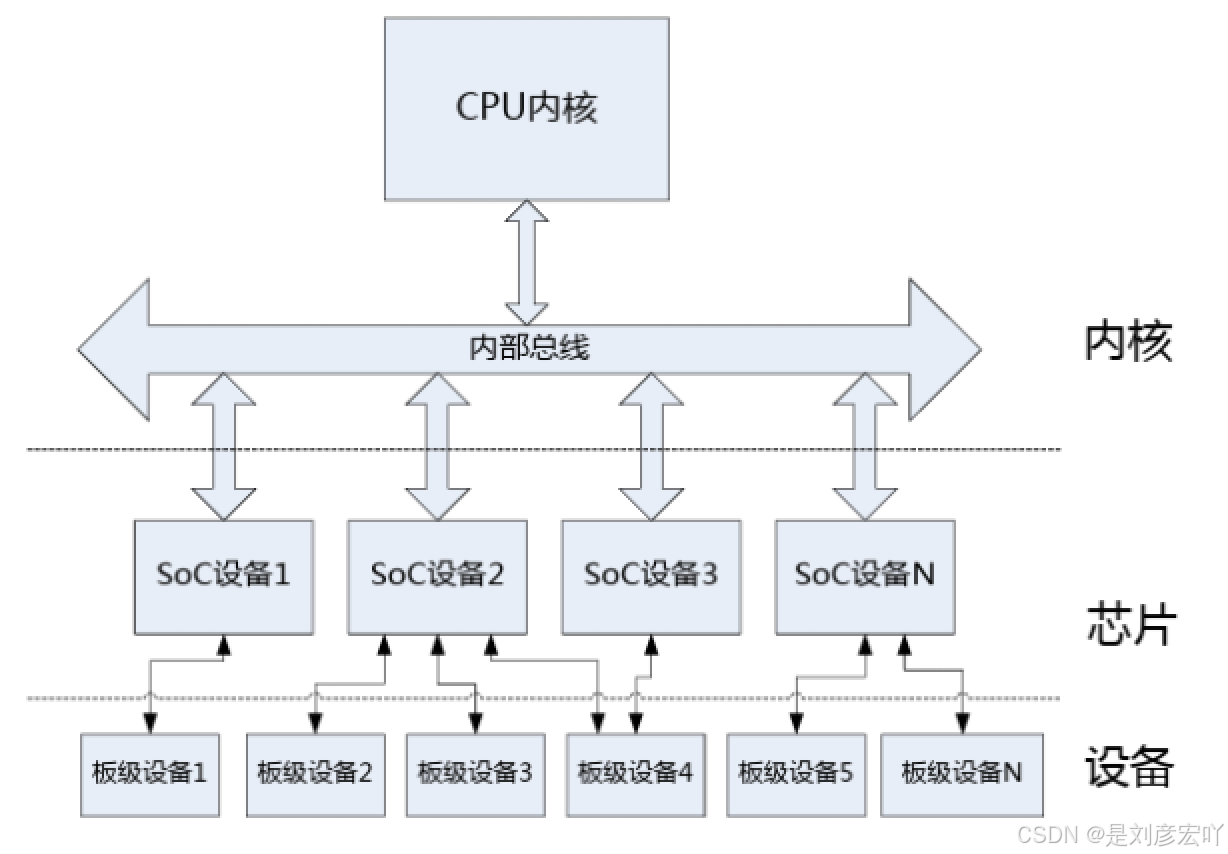
智能终端硬件系统以主处理器内核为核心,可分为3个层次来进行描述,分别是主处理器内核、SoC(片上系统)级设备和板级设备。
智能终端的发展趋势:
(1)智能设备形式多样化,向更多行业渗透
(2)从智能终端到智能硬件和机器智能,开启智能化时代



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











