









基于GFL v1
很显然,这篇文章书接上回
作者在v1中提出了GFL(包含优化带分类任务的QFL和优化回归任务的DFL),其回归任务是基于离散概率分布估计做的,很是巧妙。在v2中,作者基于v1中回归任务的离散概率分布估计,对回归任务进行质量评估,以帮助NMS时保留到回归质量最好的边界框。其直观的原理是这样的:估计的离散概率分布越平滑,那不确定性越高,网络对得到的框的质量是表示怀疑的,概率分布越尖锐,表示确定性很高,网络很笃定回归得到的边界框。
GFL v2的具体实现
作者在文中说,在NMS是所用的排位分数J可以按下式分解:
J = C × I
C代表分类分数向量,I代表回归质量,是一个标量(估计的当前预测框与gt框的IoU),这样J就是分类与回归质量的联合表征。
我们直接看它怎么具体实现的,首先上网络检测头的结构图:
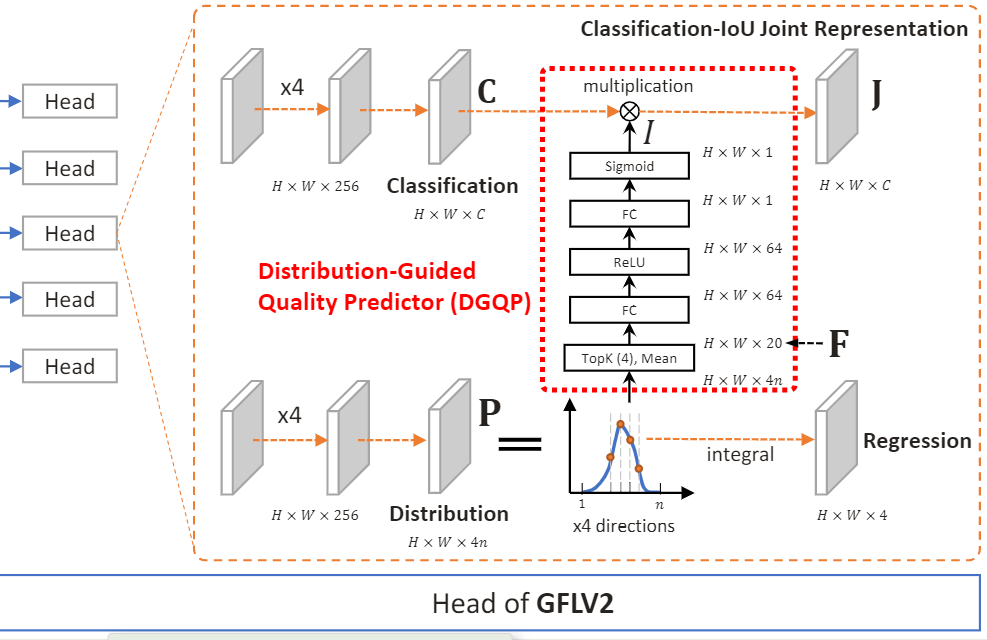
回归分支得到了4个离散概率分布P,在每一个p中,取最高的k个概率值(Top-k),以及这k个概率值的均值,
得到H×W×4×(k+1)特征,文中k取4,那么就得到了H×W×20大小的特征F,然后按照FC,ReLU,FC,Sigmoid的顺序进行特征提取,中间隐藏层的通道数设置为了64,最终得到一个标量I,与分类向量C进行相乘,得到具有回归质量感知的分类结果J。
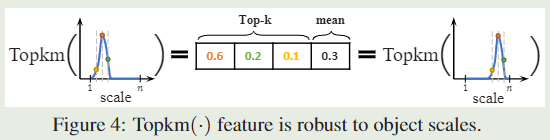
如上图,使用均值对P分布的相对偏移不敏感,其实也可以使用方差等,但效果没均值好。
训练还是和v1同样的策略,分类和回归两个分支分别使用QFL和DFL损失。
GFL进行回归质量评估的路子与前述工作很不一样,这算是最大的创新点,实现的细节还是很简单和轻量化的,这也让其在训练和推理时只会占用很少的计算资源,并且作为一个附加的模块可以很方便地应用到现有的检测器上。
我的感受:
目标检测刚开始是分类和回归不解耦的,即基于同一个支路的特征进行两个任务的实现,之后发展到解耦头,性能提升,但到了现在,如VarfocalNet,GFL这些文章,又是在积极探寻分类与回归之间的关联性,以帮助NMS拿到更准确的分数排位。















 3393
3393











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









