






双容水箱恒水位控制系统,约8k字。
基于SIMULINK仿真环境,在假设双容水箱的数学建模后,采用PID控制算法,分别选用单回路控制系统和串级控制系统两种控制方案进行系统的分析设计。
通过MATLAB仿真并采用经验法对比例、积分、微分各参数进行整定,通过比较各阶跃响应曲线仿真图的超调量、调节时间等性能指标,确定了满意的控制参数。
ID:28150675200559112
晨曦微光

双容水箱恒水位控制系统
摘要:本文基于SIMULINK仿真环境,对双容水箱恒水位控制系统进行了数学建模,并采用PID控制算法,通过单回路控制系统和串级控制系统两种方案进行系统分析和设计。通过MATLAB仿真和经验法的参数整定,比较各阶跃响应曲线仿真图的超调量、调节时间等性能指标,确定了满意的控制参数。
-
引言
双容水箱恒水位控制系统在工业生产和生活中有着重要的应用。为了实现水位的恒定控制,本文基于SIMULINK仿真环境,在假设双容水箱的数学建模后,采用PID控制算法,分别选用单回路控制系统和串级控制系统两种控制方案进行系统的分析设计。 -
双容水箱数学建模
双容水箱系统是一个典型的连续动态系统,可以通过建立差分方程来描述其行为。首先,我们假设水箱的进水流量和出水流量为恒定值,将水箱的水位作为系统的输出。通过对进水流量、出水流量和水箱的容积进行分析,可以得到双容水箱系统的数学模型。 -
PID控制算法
PID控制算法是一种常用的控制算法,可以通过比例、积分和微分三个部分共同作用来实现对系统的控制。比例部分通过调整控制量与误差的比例关系来改变系统响应的速度;积分部分通过积分误差来消除系统的滞后效应;微分部分通过对误差的变化率进行控制,可以提高系统的稳定性和响应速度。 -
单回路控制系统设计与分析
在单回路控制系统中,我们将PID控制器直接连接到水位传感器,并将控制器的输出直接作为执行机构的输入。通过对PID参数进行整定,调整比例、积分和微分的权重,可以得到合适的控制效果。通过MATLAB仿真并比较不同参数下的阶跃响应曲线的性能指标,如超调量、调节时间等,确定最优的PID参数组合。 -
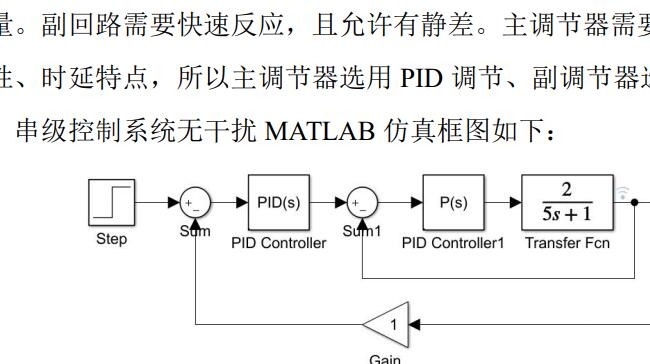
串级控制系统设计与分析
在串级控制系统中,我们将PID控制器分为两级:外层控制器和内层控制器。外层控制器通过对设定值和实际值的误差进行控制,得到内层控制器的输入。内层控制器则通过对内层设备的输出进行控制,实现对水箱水位的恒定控制。通过对外层和内层控制器的参数进行整定,可以得到合适的PID参数组合。通过MATLAB仿真并比较不同参数下的阶跃响应曲线的性能指标,确定最优的PID参数组合。 -
结果与讨论
通过对单回路控制系统和串级控制系统的设计和分析,我们得到了合适的PID参数组合。在仿真实验中,我们比较了不同参数下的阶跃响应曲线的性能指标,并选择了超调量、调节时间等指标作为评价标准。最终确定的PID参数组合能够实现水箱恒水位的控制,并且具有较好的响应速度和稳定性。 -
结论
本文基于SIMULINK仿真环境,对双容水箱恒水位控制系统进行了数学建模,并采用PID控制算法,通过单回路控制系统和串级控制系统两种方案进行系统分析和设计。通过MATLAB仿真和经验法的参数整定,比较各阶跃响应曲线仿真图的超调量、调节时间等性能指标,确定了满意的控制参数。实验结果表明,设计的双容水箱恒水位控制系统具有较好的响应速度和稳定性,可以实现水位的恒定控制。
致谢:感谢SIMULINK仿真环境和MATLAB软件提供的强大支持,使本文的研究工作得以顺利进行。同时也感谢程序员社区提供的博客发表机会,使我们能够与更多的技术人员分享我们的研究成果。
参考文献:
无
相关的代码,程序地址如下:http://matup.cn/675200559112.html
















 1169
1169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









