







初学卡尔曼滤波卡尔曼学完可能会发现好简单啊就是权重的概念,对,没错。但是用它来平滑原数据进行预测,引入高维卡尔曼滤波绝非易事。
x状态矩阵
A即是F 状态转移矩阵
B控制矩阵
u控制向量
P协方差矩阵
Q预测误差
R观测误差
H 转换矩阵
z_观测矩阵
z预测的矩阵
第一步
x = A * x + B * U;也就是X=X0+V0*T+1/2aTe2
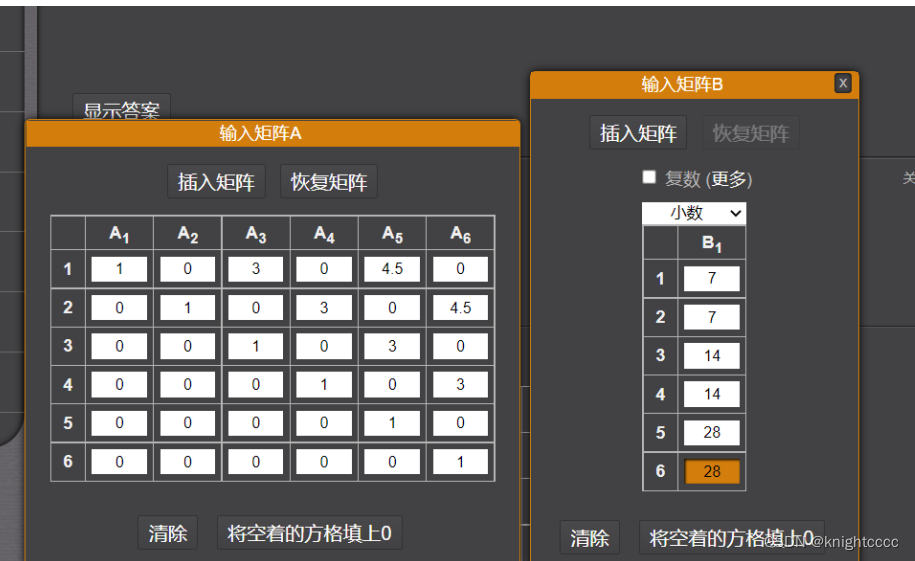

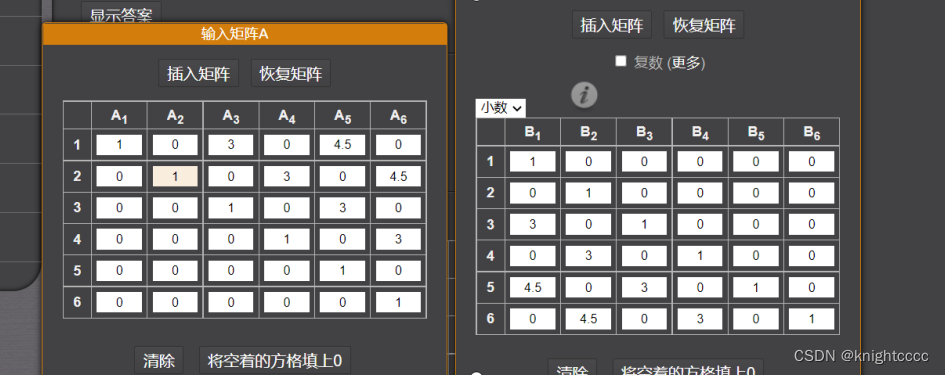
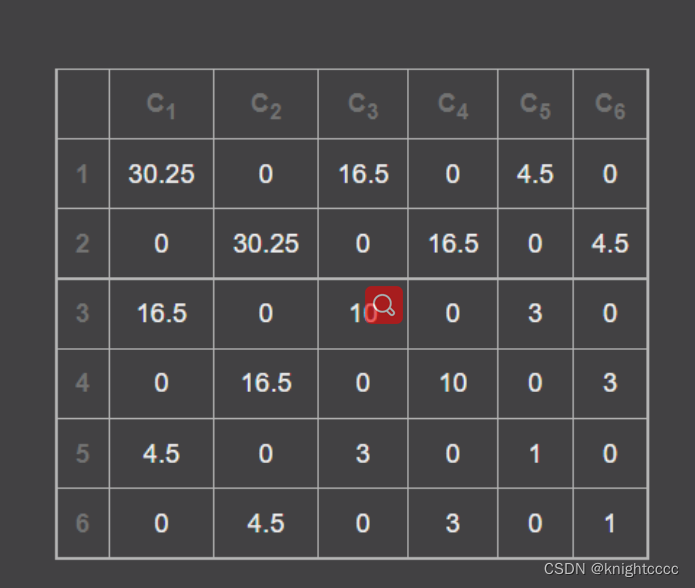
第二步P = A * P * A_T + Q;
第三步 z = H * x;
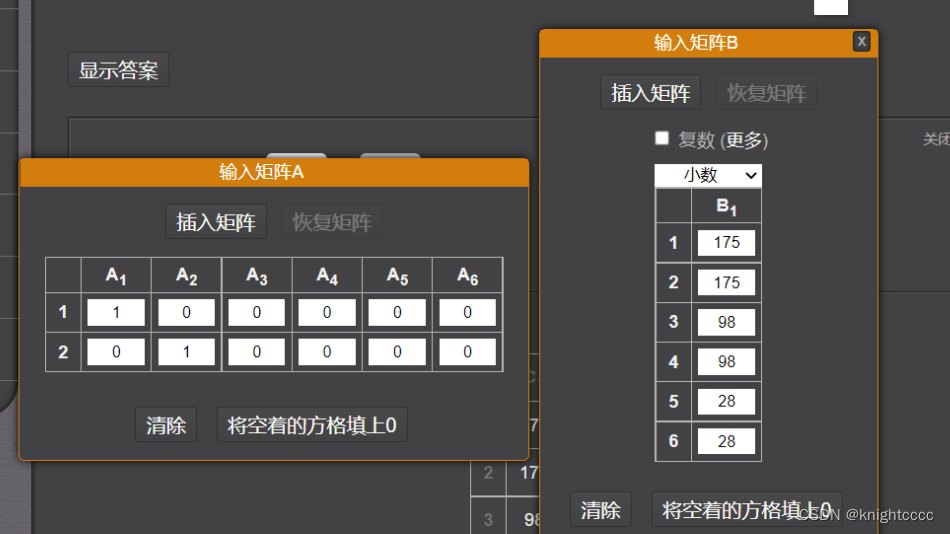
这两个值就是二维预测结果
第四步 o1 = H*P*HT + R_;

第五步Bulf2 = Bulf1.inverse();
矩阵求逆

第六步 K = P*HT*Bulf2
P = P - K*H*P
输入观测值z_
x = x + K*(z_ - z);
自己计算一遍,效果最佳!
















 974
974











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











