








船舶雷达导航系统可以获取海上目标和运动对象的方位角和距离,还可以非常准确地计算出对象的运动状态。此外,在本船与周围运动对象会合时,还可以判断出可能会发生的碰撞警告,并帮助制定出船舶最适当的避让路径,辅助实现更强的避碰策略。
为确保船舶能够安全地航行,使用电子海图系统来显示出电子海图进行导航的选定信息以及用于传播导航的相关传感器信号,来帮助航海人员设计正确的航行路线和便于监视航行路线。电子海图信息系统未来的发展方向就是把AIS导航系统、GPS导航系统、雷达扫描系统、测深系统等用于船舶导航的信息进行高效融合,形成以电子海图为核心的航行信息系统。
由于海水深度较浅或者海底存在一些障碍物,因此会造成很多危险事故。另外,海上航行时远处的危险对象也不能够清楚看见。但可以把电子海图的背景、船舶的位置坐标以及船体周围的对象进行组合,并把电子海图与雷达图像进行图像融合处理,便可以得到所有的组合信息,易实现海上安全航行。电子海图与雷达图像融合之后,不仅可以把来自雷达的大量图像进行数据共享,而且可以实时生成,通过绘制船舶综合航行的态势图把数据显示出来。由于航海人员只需一个显示器就能够观察到船舶周围的所有状况,即便于采取适当的船舶避碰措施,航海人员的工作量便大大减少,非常简单、方便。如果船舶在大雾等恶劣天气下进行近海航行,这无疑给他们带来了福音。
目前国内在电子海图与雷达图像的融合技术研究方面还处于起步阶段,而西方许多发达国家的许多导航系统已经实现了2种图像的融合,因此将融合技术国产化已迫在眉睫。本文基于雷达图像的显示特征和电子海图的显示特性,对电子海图和雷达图像的融合显示技术进行研究。
1.电子海图和雷达图像融合方案
首先,用于获取雷达图像的视频采集卡得到雷达视频信息后存放到图库中以便于接下来的与电子海图融合显示操作。参考点设置为船舶的坐标,参考线设置为地理位置的正北方向,然后对获取的雷达图像数据和电子海图数据进行一系列的分析与处理。在已知的雷达扫描范围下,计算出电子海图的比例尺、显示的范围大小以及电子海图和雷达的融合信息。
由于雷达的显示模式有多种,因此在判断图像范围内的颜色大小值之前,必须设置好当前雷达图像的显示模式。提取了雷达图像中像素阈值矩阵后,就要判断某像素点是否为目标回波,判断的方法是比较像素的阈值与来自雷达的对象图像的颜色阈值系是否相同。一旦电子海图和雷达图像能够完全匹配,便可以将与电子海图对应坐标的像素阈值转变为雷达图像中某个像素的颜色阈值。此外,在融合显示系统实时重绘图像的支持下,电子海图和雷达图像都在不断更新。其中,图像使用双帧进行显示,即把显示任务交给看不见的前缓存,把绘制任务交给看得见的后缓存,当后缓存完成图像的绘制任务后,理解把前缓存和后缓存进行切换,最终实现图像更新看上去非常平滑。值得注意的一点是:由于肉眼有一定的余光滞后性,图像基本没有闪烁现象。
电子海图和雷达图像进行融合显示,所需的基本条件如下:
1)GPS已获取电子海图和雷达图像融合的参考点,即船舶的经度坐标以及纬度坐标
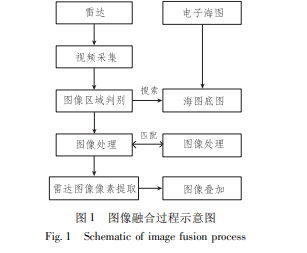
2)把电子海图设置为正上为正北方向的显示模式。雷达图像需要根据电罗经测得的正北方向数据,然后选择显示模式。显示模式不仅提供依据让雷达图像进行角度调整,同时也提供了参考线让电子海图和雷达图像进行融合。电子海图和雷达图像的融合显示过程如图1所示。
2.图像匹配的模型建立
1)确定电子海图的显示范围
由于地球为一个椭圆形的球状体,如果将其放在一个直角坐标系中进行显示,就需要进行投影。墨卡托投影变换的过程比较简单,即使在很小的范围内计算的准确度也非常高,因此将魔卡托算法选为投影变换算法。
大地坐标转换到直角坐标系的变换公式如下:
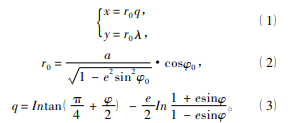
式中:x和y为墨卡托算法的直角坐标;λ为地球坐标系的经度;φ为地球坐标系的纬度值;a为椭圆形地球较长的半径;e为地球的第一偏心率;φ0为基准纬度值;q为等量纬度值;r0为参考纬度圆圈的半径大小。
进行直角坐标投影后可计算出雷达的扫描范围:

式中:λ0和φ0为雷达的经度坐标和纬度坐标;(λmin,φmin)和(λmax,φmax)为雷达扫描的经纬度范围;φ(λ0,φ0)为雷达中心的经度直角坐标和纬度直角坐标;(·)和(·)-1为电子海图转换的魔卡托方程和逆;L为雷达的量程范围。当得到的经纬度方位后,便可以搜索并显示出相应的电子海图。
3.电子海图显示比例尺
只有电子海图和雷达图像的比例尺相同时,二者才能进行融合。当调节雷达的量程时,雷达图像的比例尺也会发生相应的变化。此外,由于电子海图一般都可随意进行缩小或者放大,因此还可以直接把电子海图缩放至最恰当的比例尺,从而实现电子海图和雷达图像的比例尺相匹配。
假设雷达的扫描范围的半径为R,半径的扫描像素为a,点距为b,那么雷达图像的比例尺1/sr可简单表示为:

电子海图的原始比例尺为1/s0,则其缩放比为:

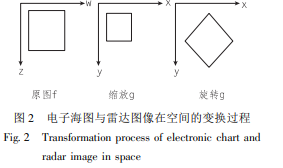
倘若把参考方向设置为船舶的正北方向,把雷达图像进行几何变换之后,就可以与匹配电子海图。运用仿射变换算法,并把电子海图进行缩小或者放大,直角坐标系(w,s)的某幅图像f进行几何变换,便可以得到对应的直角坐标系(x,y)的图像g,电子海图与雷达图像在空间的变换过程如图2所示。
运用映射变换矩阵实现坐标转换:
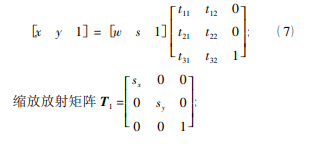
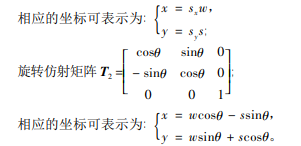
以上仿射变换是实现图像几何变换目标的重要算法,其过程不能出任何差错。
4.电子海图与雷达图像融合的实现
为了实现雷达图像能够与电子海图进行实时融合,选择一个精度比较高的匹配算法非常必要。
电子海图与雷达图像之间获取的传感器不相同,而且获取的时间也不一致,这导致图像的灰度值存在很大的差别,而且雷达在成像的时候还会产生很多噪声,得到的图像特点根本不相同,所以,就要求相应的匹配算法必须是根据环境特点,而且能够允许出现一定的容量错误和具有一定抗干扰性能。经综合考虑,本论文采用的匹配算法为基于距离的豪斯多夫(Hausdorff)算法,它能够改善图像匹配的精度差和速度慢的缺陷,同时可以过滤掉图像的噪声[4]。
把N1×N2维的电子海图N用作基准图,把M1×M2维的雷达图像M用作实时图,二者都是二维系统中通过边缘提取操作后形成的点集,规定dF(N,M)为算法前向的距离,dB(M,N)为算法后向的距离,其表达式如下:

其中‖·‖为所有点集上的距离范数。
如果规定β为空间中的任意点,然后规定Dβ=minm∈Mβ-m,D^β=minn∈N‖β-n‖,则距离可表示为:

因为使用豪斯多夫算法计算距离实际上就是测量一个点集与另一个点集之间匹配度最差的点的距离,所以它很容易被远离中心的漏检点和噪声点影响,但这种缺陷无法避免,只要想要计算图像特点的点集合。为了解决这个问题,本文给出部分使用豪斯多夫算法得到的距离表达式。
假设N1为基准图像N的其中一个特征,M1为实时图像M的其中一个特征段,N1={L1,L2,…,Lk}M1={l1,l2,…,lk},则点集N1与点集M1之间的部分豪斯多夫距离公式可表示为:

用部分豪斯多夫距离进行电子海图和雷达图像匹配过程如图3所示。
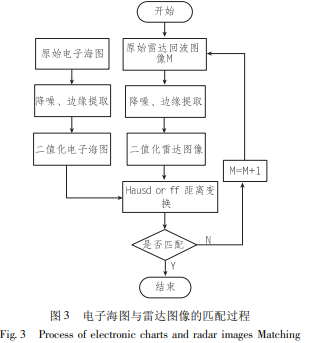
首先对原先的雷达回波图像M和原先的电子海图N分别进行噪声的降低处理,然后进行边缘提取,最后进行二值化处理,便可以得到一个数字图像。而变换处理可以把二值化后的图像变换成另外一幅全新的图像。所有点集与点集的距离都与一个像素的阈值相对应,正常情况主要包含以上2个步骤:
1)将雷达图像按照自左而右、从上至下的顺序进行扫描,同时把距离进行适当的转化,接着对图像按照自右而左、从下至上的顺序进行扫描,同时把反向的距离进行适当的转化便可以获取匹配的图像。
2)二值化图像里的各个特性点与直角坐标距离变换图像的像素值取决匹配度值。如果豪斯多夫的距离值大于某一个闭值的时候,则把此点视为未能成功匹配的点。值得注意的一点是,最后的匹配点集是正反向都能够顺利匹配成功的点集合的交集
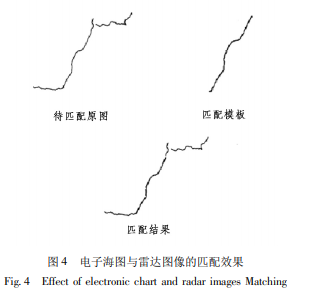
为了以豪斯多夫为核心的融合显示效果,采用的匹配对象是2条随意的轮廓直线,电子海图与雷达图像的匹配效果如图4所以。仿真结果显示,该图像匹配的实时性比较好,抗干扰能力比较强,能够允许出现一定的容量差错,确保了图像匹配能够高效、稳定、高精度地进行。
5.结语
本文对电子海图和雷达图像融合显示的相关理论进行了分析和研究,在查阅相关资料已归纳出电子海图和雷达图像的显示属性的基础上,利用墨卡托投影变换算法,便可以得到电子海图的显示比例尺和显示范围。通过对电子海图和雷达图像的转换达到图像的匹配目标。把电子海图用作融合图像的底层图像,然后把雷达图像融合到电子海图上。研究结果显示,文中的融合显示方案实现了电子海图和雷达图像的高效融合,实现图像信息的匹配,帮助航海人对掌控船体附近的状况。因此,本文讨论的电子海图和雷达图像的叠融合方案可行,但由于试验条件的限制,不能对相关性能进行实验,有关改进措施待以后解决。 参考文章:电子海图、AIS、雷达


















 3164
3164

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











