







目录
1 摘要
DBC文件是基于文本的、结构化的CAN通信协议定义,采用关键字(如BO_定义报文、SG_定义信号)和属性语法,属于领域特定语言(DSL, Domain-Specific Language的一种。
2 DBC文件属性详细说明
DBC文件是用于描述CAN总线通信的数据库文件,包含节点、消息、信号等定义。以下是DBC文件中主要的关键字和属性语法详细说明以及示例:
2.1 VERSION (版本信息)
在DBC(Database Container)文件中,VERSION 属性是一个可选的元数据字段,主要用于记录文件的版本信息。
定义:DBC文件的版本信息,可选字段
作用:
1.版本标识
用于标注DBC文件的版本号或修订信息,例如:VERSION “1.0” 或 VERSION “2024-03-RevA”。
帮助开发团队区分不同迭代版本的DBC文件,尤其在多人协作或长期项目中。
2. 兼容性管理
当DBC文件被用于不同工具链(如CANoe、CANalyzer、代码生成工具等)时,版本信息可辅助判断文件是否与当前工具兼容。
某些工具可能会根据版本号决定是否支持特定语法或功能。
3. 文档与追溯
作为文件的历史记录,便于追踪修改记录或关联到版本控制系统(如Git)。
在问题排查时,可通过版本信息快速定位变更点。
4. 非功能性字段
VERSION 通常不会影响DBC文件的解析逻辑或实际通信行为,仅为注释性内容。
如果省略该字段,大部分工具仍能正常处理DBC文件。
语法格式:
VERSION "version_string"
示例:
VERSION "2.3"
文本打开如下:
CANdb++格式打开如下:

注意事项:
- 版本格式无严格标准,可由用户自定义(如语义化版本、日期等)。
- 部分工具可能在导出DBC文件时自动添加版本信息(如CANoe会生成类似VERSION ""的空字段)。
2.2 NS_ (命名空间和新符号)
在DBC (Database Container)文件中,NS_属性用于定义命名空间(命名空间)和声明新符号,这是DBC文件格式中的一个重要语法元素。
定义:定义DBC文件中使用的新符号和命名空间
作用:
- 定义命名空间:
NS_用于声明消息、信号和其他元素所属的命名空间
这有助于组织和管理大型CAN网络中的复杂数据结构 - 声明新符号:
它允许在DBC文件中引入新的符号和标识符
这些符号可以用于后续的消息、信号等定义 - 版本控制:
通常出现在DBC文件的开头,作为版本声明的一部分
语法格式:
NS_ :
NS_DESC_
CM_
BA_DEF_
BA_
VAL_
CAT_DEF_
CAT_
FILTER
BA_DEF_DEF_
EV_DATA_
ENVVAR_DATA_
SGTYPE_
SGTYPE_VAL_
BA_DEF_SGTYPE_
BA_SGTYPE_
SIG_TYPE_REF_
VAL_TABLE_
SIG_GROUP_
SIG_VALTYPE_
SIGTYPE_VALTYPE_
BO_TX_BU_
BA_DEF_REL_
BA_REL_
BA_DEF_DEF_REL_
BU_SG_REL_
BU_EV_REL_
BU_BO_REL_
SG_MUL_VAL_
示例:
文本打开如下:
(通常保留默认值)
注意事项:
- NS_声明通常出现在DBC文件的开头部分
- 不同的CAN工具链可能对NS_属性的支持略有不同
- 在编辑DBC文件时,保持NS_部分的完整性很重要,因为它定义了文件的基本结构
2.3 BS_ (波特率定义)
在DBC(Database CAN)文件中,BS_ 是用于定义CAN总线通信基础参数的属性语法,其核心作用是指定CAN网络的波特率(位速率)及相关时序参数。
定义:指定CAN总线的波特率
作用:
- 定义通信速率:指定CAN总线的传输速率(如125 kbps、250 kbps、500 kbps等),确保所有节点使用相同的波特率。
- 时序基准:为CAN帧的位时间(Bit Time)提供参考,影响同步、采样点和错误检测机制。
- 兼容性:部分工具可能依赖BS_生成底层驱动配置(如CAN控制器寄存器值)。
语法格式:
BS_: baudrate [BTR1] [BTR2]
波特率(Baud Rate):单位为kbps(千比特每秒),例如 500 表示500 kbps。
BTR1 和 BTR2:可选参数,用于定义CAN控制器的位时序配置(通常用于较旧的CAN硬件或特殊需求),现代工具可能忽略此参数。
示例:
BS_: 500000
BS_:可不配置
注意事项:
- 必须与硬件一致:DBC中定义的波特率需与实际CAN总线硬件配置(如终端电阻、时钟源)完全匹配,否则会导致通信失败。
- 现代工具的简化:许多工具(如Vector CANoe)可能仅使用BS_中的波特率,而忽略BTR1/BTR2,转而通过硬件配置文件(如.ldf)管理时序。
- J1939等协议:在J1939 DBC中,BS_通常固定为250 kbps,但实际速率可能由上层协议决定。
2.4 BU_ (总线节点定义)
在DBC(Database CAN)文件中,BU_(Bus Node Definition)是一个关键属性,用于定义总线(Bus)上所有存在的节点(ECU节点)。
定义:定义总线上的节点(ECU)
作用:
- 声明总线上的所有节点
- 列出所有可能发送或接收报文的ECU(电子控制单元)
- 关联报文和信号的发送者;在后续的BO_(报文定义)和SG_(信号定义)中,通过Vector__XXX或发送节点名称指定报文的发送者。
例如:
这里BO_ 100 RPM: 8 Engine // 报文ID 100 由 "Engine" 节点发送 SG_ RPM : 0|16@1+ (0.1,0) [0|5000] "rpm" Transmission,DashboardEngine必须在BU_中定义,否则会报错。 - 支持网络管理功能,某些工具链(如CANoe)会利用BU_中的节点列表进行网络管理(休眠/唤醒逻辑)。
- 文档化和可读性,提供总线的全局视图,便于开发者理解网络拓扑。
语法格式:
BU_: node1 node2 node3 ...
BU_ 是关键字,表示总线节点的定义开始。
NodeX 是具体的节点名称(如ECU名称),多个节点用空格分隔。
如果总线没有节点,需保留空列表:BU_:(但实际应用中通常至少有一个节点)。
示例:
BU_: ECU1 ECU2 VCU BMS
文本打开如下:
CANdb++格式打开如下:
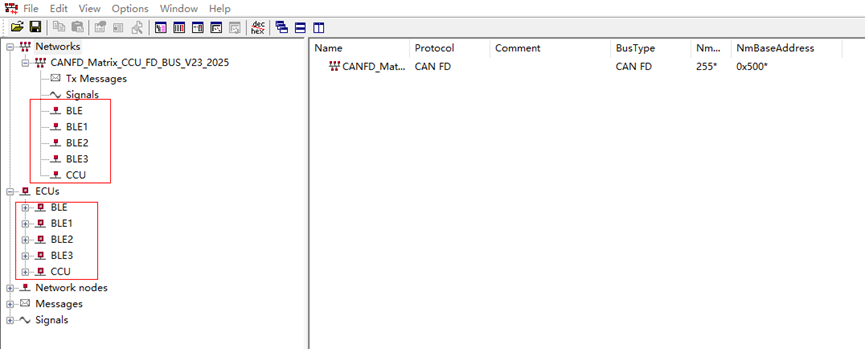
注意事项:
- 节点名称唯一性:每个节点名称必须在
BU_中唯一,且不能与DBC其他关键字冲突。 - 大小写敏感:节点名称区分大小写(例如
Engine≠engine)。 - 依赖关系:若报文/信号中引用了未在
BU_中声明的节点,DBC解析工具可能报错。
2.5 BO_ (报文定义)
在DBC(Database CAN)文件中,BO_(即Message Definition)是用于定义CAN报文(Message)的核心语法结构,其作用是为CAN总线通信中的报文提供详细的描述和配置。
定义:定义CAN消息(报文)
作用:
- 定义报文的基本属性
指定报文的名称、唯一标识符(CAN ID)、长度(字节数)、发送节点(ECU等关键信息。
为信号(Signal)的解析提供框架,所有信号必须归属于某个BO_定义的报文。 - 组织信号(Signals)
报文是信号的容器,通过BO_定义的报文后,后续会用SG_语法定义该报文包含的具体信号(如车速、转速等)。 - 配置通信参数
定义报文的发送行为(如周期发送、事件触发等),虽然DBC本身不直接配置周期时间,但可通过BO_结合工具链(如CANoe)实现。
关联部分:
-
信号定义(
SG_)- 在
BO_下方通过SG_定义该报文包含的信号,例如:SG_ VehicleSpeed : 0|16@1+ (0.01,0) [0|655.35] "km/h" ECU_Engine
- 在
-
节点定义(
BU_)BO_中的<TransmittingNode>需在BU_部分声明,例如:BU_: ECU_Engine ECU_Body
-
属性扩展(可选)
- 可通过
BA_为报文添加额外属性(如周期时间GenMsgCycleTime):BA_ "GenMsgCycleTime" BO_ 100 = 100; // 报文100的发送周期为100ms
- 可通过
语法格式:
BO_ message_id message_name: message_size transmitter
参数:
- message_id:
报文的唯一标识符(十进制或十六进制,如500或0x1F4)。
在标准CAN中为11位(0x0000x7FF),扩展CAN中为29位(0x000000000x1FFFFFFF)。 - message_name:
报文的名称(如EngineStatus),需唯一且描述性强。 - message_size:
报文数据域的长度(字节数,1~8字节,如8表示最大长度)。 - transmitter:
发送该报文的ECU节点名称(如ECU_Engine),需与BU_部分定义的节点名称一致。
示例:
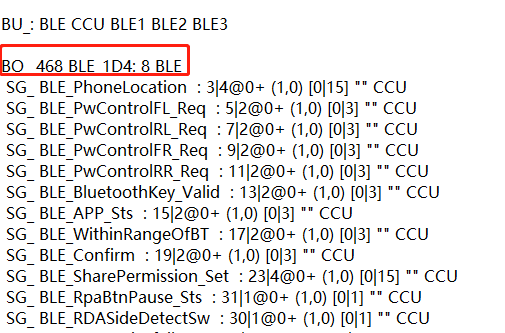
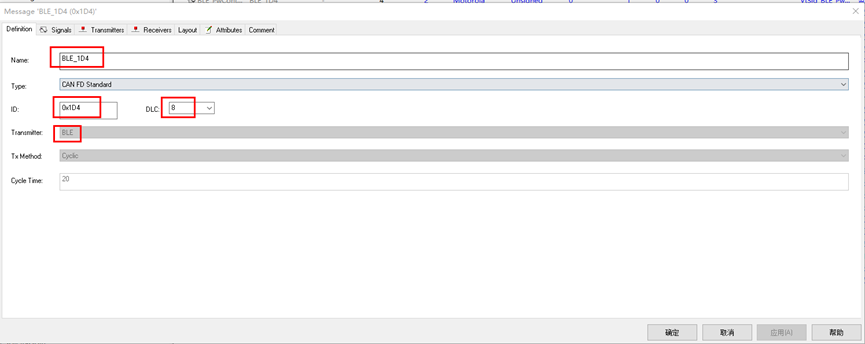
BO_ 468 BLE_1D4: 8 BLE
文本打开如下:
CANdb++格式打开如下:
注意事项:
- CAN ID冲突:同一DBC文件中不能有重复的CAN ID。
- 字节长度:需与实际通信协议一致(如J1939规范可能固定为8字节)。
- 扩展帧:若使用29位CAN ID,需在工具中明确标识(如0x1FFFFFFF)。
2.6. SG_ (信号定义)
在DBC(Database CAN)文件中,SG_(Signal Definition)是用于定义CAN信号的关键属性语法,其作用是为CAN报文中的具体信号提供详细的描述和配置。
定义:定义CAN消息中的信号
作用:
(1) 信号命名与标识
SignalName:唯一标识信号名称(如VehicleSpeed),用于在通信和解析时引用该信号。
(2) 物理值转换
Factor(系数)和Offset(偏移量)
将原始值(Raw Value)转换为物理值(Physical Value):
物理值 = 原始值 × Factor + Offset
示例:原始值1000 × 0.01 + 0 = 10.0 km/h。
(3) 信号布局定义
StartBit:信号在报文数据域中的起始位(如8表示从第8位开始)。
Length:信号占用的位数(如16表示16位信号)。
ByteOrder:字节序
0:Motorola(大端,高位在前)
1:Intel(小端,低位在前)。
(4) 数值范围与单位
[Min|Max]:信号的物理值范围(如[0|655.35])。
Unit:物理单位(如"km/h"),用于工程解读。
(5) 接收节点指定
Receiver1,Receiver2,…:明确哪些ECU(如ECM,Display)需要接收该信号。
(6) 值类型(符号/无符号)
ValueType:
+:无符号信号(只能表示正数)。
-:有符号信号(使用补码表示负数)。
语法格式:
SG_ signal_name : start_bit|signal_length@byte_order value_type (factor,offset) [minimum|maximum] unit receiver1,receiver2,...
参数:
- start_bit: 起始位(0-63)
- signal_length: 信号长度(位数)
- byte_order: 0=大端(Intel),1=小端(Motorola)
- value_type: +表示无符号,-表示有符号
- factor: 缩放因子
- offset: 偏移量
- minimum/maximum: 物理值范围
- unit: 单位
- receivers: 接收节点列表
示例:
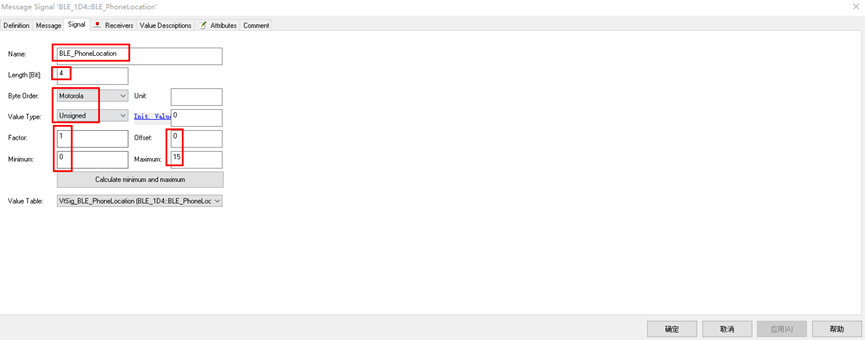
SG_ BLE_PhoneLocation : 3|4@0+ (1,0) [0|15] "" CCU
SG_ BLE_PwControlFL_Req : 5|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_PwControlRL_Req : 7|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_PwControlFR_Req : 9|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_PwControlRR_Req : 11|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_BluetoothKey_Valid : 13|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_APP_Sts : 15|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_WithinRangeOfBT : 17|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_Confirm : 19|2@0+ (1,0) [0|3] "" CCU
SG_ BLE_SharePermission_Set : 23|4@0+ (1,0) [0|15] "" CCU
文本打开如下:
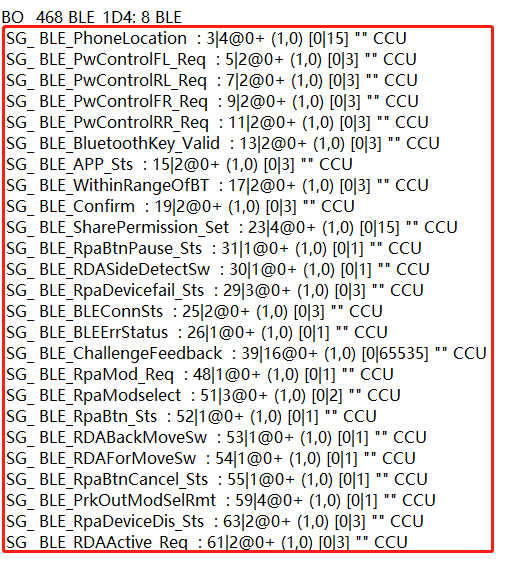
CANdb++格式打开如下:
注意事项:
- 唯一性:同一报文(BO_)内信号名不可重复。
- 对齐规则:Motorola格式需注意信号跨字节时的位序。
- 精度控制:Factor和Offset的浮点数精度可能影响解析结果。
2.7 CM_ (注释)
在DBC (CAN数据库) 文件中,CM_ 是用于添加注释(Comment)的关键字,它允许开发者为DBC文件中的各种元素添加描述性文本。
定义:为节点、消息或信号添加注释
作用:
CM_ 注释的主要作用包括:
- 提高DBC文件的可读性和可维护性
- 记录设计意图和功能描述
- 帮助新团队成员理解CAN通信设计
- 作为文档的一部分,便于后期维护和调试
语法格式:
CM_ 注释有两种主要形式:
-
全局注释(对整个DBC文件的注释):
CM_ "这是一个全局注释,描述整个DBC文件"; -
特定元素注释(对特定对象的注释):
CM_ [对象类型] 对象名称 "注释内容";
支持的注释对象类型:
CM_ 可以用于注释以下DBC元素:
BU_- 节点/ECU (电子控制单元)BO_- 报文 (Message)SG_- 信号 (Signal)VAL_- 信号值描述EV_- 环境变量- 其他自定义属性
示例:
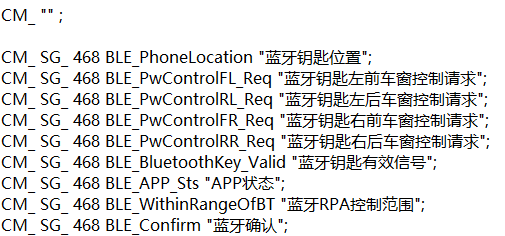
CM_ BU_ ECU1 "Engine Control Unit";
CM_ BO_ 256 "Engine status message";
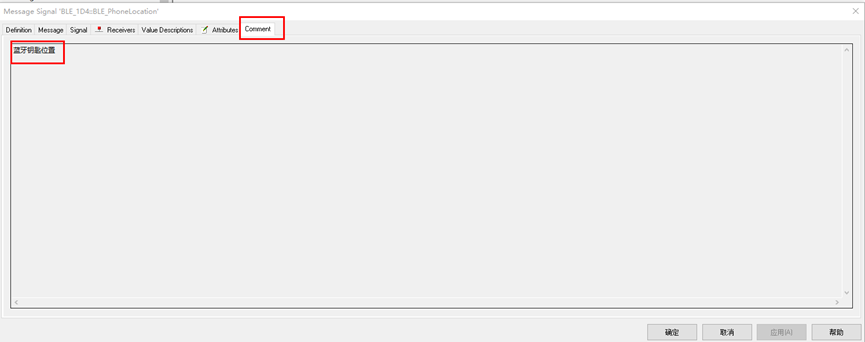
CM_ SG_ 468 BLE_PhoneLocation "蓝牙钥匙位置";
文本打开如下:
CANdb++格式打开如下:
2.8 BA_DEF_ (属性定义)
在DBC(Database Container)文件中,BA_DEF_(Attribute Definition)用于定义属性的名称、数据类型和适用范围,是DBC文件语法中管理自定义属性的核心机制。
定义:定义自定义属性
语法格式:
BA_DEF_ object_type attribute_name attribute_type [Min Max];
object_type可以是:
- BU_ 节点属性
- BO_ 消息属性
- SG_ 信号属性
- EV_ 环境变量属性
- (空) 全局属性
attribute_type可以是:
- INT 整数
- HEX 十六进制
- FLOAT 浮点数
- STRING 字符串
- ENUM 枚举值列表
作用:
- 定义属性的基本结构
- 语法示例:
BA_DEF_ 属性名 值类型 默认值; - 参数说明:
- 属性名:自定义属性的标识(如
"GenMsgCycleTime")。 - 值类型:支持
INT(整数)、FLOAT(浮点数)、STRING(字符串)、ENUM(枚举,如"ENUM \"Option1\",\"Option2\"")等。 - Min Max(可选):属性值的上下最值,即指定了取值范围,字符串类型无此项。
- 属性名:自定义属性的标识(如
- 指定属性的适用范围
BA_DEF_后可通过BO_(报文)、SG_(信号)、EV_(环境变量)等关键字限定属性生效范围:
- 报文级属性(作用于整个报文):
BA_DEF_ BO_ "GenMsgCycleTime" INT 0 1000; - 信号级属性(作用于单个信号):
BA_DEF_ SG_ "SignalType" ENUM "Standard","Extended"; - 全局属性(无前缀,适用于节点、环境变量等):
BA_DEF_ "NodePriority" INT 0 127;
- 与
BA_(属性赋值)配合使用
BA_DEF_仅定义属性模板,实际赋值需通过BA_实现:BA_ "GenMsgCycleTime" BO_ 100 500; # 报文ID=100的周期为500ms BA_ "SignalType" SG_ 100 "EngineRPM" "Extended"; # 指定信号的枚举值
典型应用场景:
- 配置报文周期:定义
GenMsgCycleTime控制报文发送频率。 - 信号单位/精度:通过
Unit(STRING)、Scale(FLOAT)等属性标准化信号解析。 - 版本/注释:添加
"DBVersion"或"Description"等全局元数据。
示例:
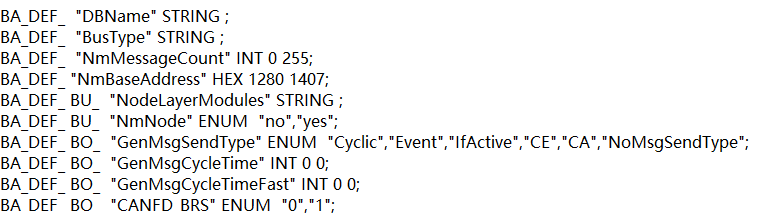
BA_DEF_ "DBName" STRING ;
BA_DEF_ "BusType" STRING ;
BA_DEF_ "NmMessageCount" INT 0 255;
BA_DEF_ "NmBaseAddress" HEX 1280 1407;
BA_DEF_ BU_ "NodeLayerModules" STRING ;
BA_DEF_ BU_ "NmNode" ENUM "no","yes";
BA_DEF_ BO_ "GenMsgSendType" ENUM "Cyclic","Event","IfActive","CE","CA","NoMsgSendType";
BA_DEF_ BO_ "GenMsgCycleTime" INT 0 0;
BA_DEF_ BO_ "GenMsgCycleTimeFast" INT 0 0;
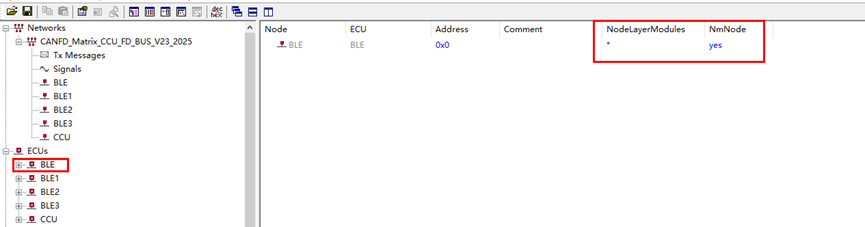
文本打开如下:
CANdb++格式打开如下:
2.9 BA_DEF_DEF (Attribute Default Value) - 属性默认值
BA_DEF_DEF 是 DBC (CAN 数据库) 文件中的一个关键属性语法,它用于定义属性的默认值。
功能说明:
- 设置默认值:为在 BA_DEF 中定义的属性指定默认值
- 适用范围:当某个特定对象(消息、信号、节点等)没有显式设置该属性值时,将使用此默认值
- 统一管理:确保所有未明确赋值的对象属性都有一个基准值
语法格式:
BA_DEF_DEF_ "ATTRIBUTE_NAME" DEFAULT_VALUE;`
示例:
BA_DEF_ "BusType" STRING;
BA_DEF_DEF_ "BusType" "CAN";
这表示"BusType"属性的默认值为"CAN",除非在特定对象上显式覆盖此值。
应用场景:
- 为枚举类型属性设置默认选项
- 为数值型属性设置基准值
- 为布尔型属性设置默认状态
- 为字符串属性设置默认文本
注意事项:
- 必须先使用 BA_DEF 定义属性,然后才能用 BA_DEF_DEF 设置其默认值
- 默认值必须与属性定义中指定的数据类型匹配
- 特定对象上可以通过 BA_ 语法覆盖默认值
以下是关于DBC文件中BA_DEF_DEF(属性默认值)与BA_DEF_(属性定义)的区别对比表格:
| 对比项 | BA_DEF_ (属性定义) | BA_DEF_DEF (属性默认值) |
|---|---|---|
| 作用 | 定义属性的名称、数据类型、适用范围(对象类型) | 为已定义的属性指定默认值 |
| 语法示例 | BA_DEF_ "AttributeName" INT 0 100; | BA_DEF_DEF_ "AttributeName" 50; |
| 参数 | 包含属性名、数据类型、范围/枚举等约束 | 仅包含属性名和默认值(需匹配定义的数据类型) |
| 适用范围 | 全局或特定对象(报文、信号、节点等) | 必须与BA_DEF_中定义的属性名一致 |
| 必要性 | 必须显式定义属性 | 可选(未指定时,属性无默认值) |
| 多对象支持 | 可指定适用于BO_、SG_、BU_等对象类型 | 仅对已定义的属性生效,不区分对象类型 |
| 典型用途 | 创建新属性(如单位、精度、版本号) | 确保属性在未显式赋值时使用默认值 |
补充说明:
-
数据类型匹配
BA_DEF_DEF的默认值必须与BA_DEF_中定义的类型兼容(如INT类型的默认值必须是整数)。 -
层级关系
- 先通过
BA_DEF_定义属性(如:BA_DEF_ SG_ "Voltage" FLOAT 0 12.5;)。 - 再通过
BA_DEF_DEF_设置默认值(如:BA_DEF_DEF_ "Voltage" 5.0;)。
- 先通过
-
实际应用示例
// 定义属性 BA_DEF_ BO_ "CycleTime" INT 0 1000; BA_DEF_ SG_ "Unit" STRING; // 设置默认值 BA_DEF_DEF_ "CycleTime" 100; // 报文默认周期100ms BA_DEF_DEF_ "Unit" "V"; // 信号默认单位"V" -
特殊场景
若属性定义为枚举(如ENUM "On,Off"),则默认值必须是枚举值之一(如BA_DEF_DEF_ "State" "On")。
通过这种设计,DBC文件可以灵活管理属性的默认行为,减少重复配置。
2.10 BA (Attribute) - 属性定义
在DBC(Database Container)文件中,BA(Attribute)是用于定义或修改信号、消息、节点等对象的自定义属性的关键语法。其核心作用是为CAN总线通信中的元素添加元数据,以便在仿真、测试或代码生成等场景中提供额外的控制信息。
语法格式
BA_ "属性名" 对象类型 对象名称 值;
- 属性名:自定义或预定义的属性名称(如
GenMsgSendType,GenSigStartValue等)。 - 对象类型:可以是
BU_(节点)、BO_(消息)、SG_(信号)、EV_(环境变量)等。 - 对象名称:目标对象的名称(如消息名、信号名等)。
- 值:属性的具体值(数值、字符串或枚举)。
作用:
-
定义默认值
例如,为信号设置初始值:BA_ "GenSigStartValue" SG_ Message1.Signal1 0.5; -
控制代码生成
例如,指定消息的发送方式(周期/事件):BA_ "GenMsgSendType" BO_ Message1 "Cyclic"; -
添加工程元数据
例如,为节点添加描述信息:BA_ "SystemNodeDesc" BU_ Node1 "Engine Control Unit"; -
配置工具链行为
例如,设置信号显示颜色(某些工具支持):BA_ "SigColor" SG_ Message1.Signal1 "red";
BA属性的分类:
- 预定义属性:由CANdb++或工具链定义(如
GenMsgCycleTime)。 - 自定义属性:用户自行添加,需先在
BA_DEF_中声明:BA_DEF_ BO_ "MyCustomAttr" INT 0 100; BA_ "MyCustomAttr" BO_ Message1 42;
BA用于定义各种属性,可以应用于整个DBC、消息、信号或节点。常见的BA属性包括:
-
消息级属性:
BA_ "GenMsgCycleTime" BO_ 1000 100;表示ID为1000的消息周期为100ms
-
信号级属性:
BA_ "GenSigStartValue" SG_ 1000 EngineSpeed 65535;设置EngineSpeed信号的初始值
-
节点级属性:
BA_ "NetworkNode" BU_ Engine_ECU 1;定义节点属性
-
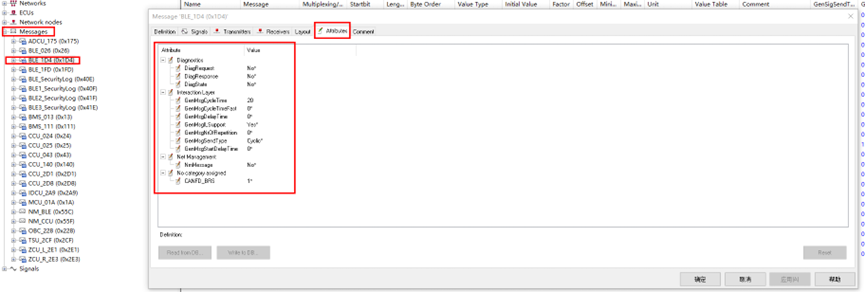
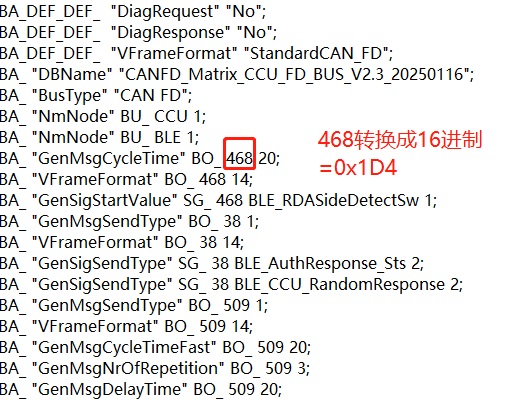
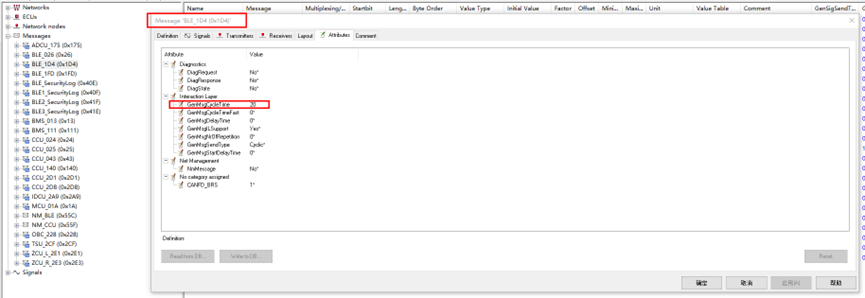
环境变量属性:
BA_ "GenMsgCycleTime" BO_ 468 20; BA_ "VFrameFormat" BO_ 468 14;
示例:
文本打开如下:
CANdb++格式打开如下:
注意事项:
- 作用域:
BA必须引用已存在的对象(消息、信号等)。 - 依赖工具支持:部分属性可能仅适用于特定工具(如Vector CANoe)。
- 版本兼容性:DBC格式版本可能影响属性的可用性。
2.11 VAL_ (信号值描述)
在DBC(CAN数据库)文件中,VAL_属性用于为信号值提供可读的描述性文本。
定义:为信号定义枚举值描述
语法格式:
VAL_ message_id signal_name value1 "description1" value2 "description2" ... ;
示例:
VAL_ 256 EngineState 0 "OFF" 1 "CRANKING" 2 "RUNNING" 3 "FAULT";
文本打开如下:

作用:
- 信号值解释:将原始数值映射为有意义的文本描述
- 提高可读性:使工程师和开发人员更容易理解信号值的含义
- 调试辅助:在分析工具中显示描述而非原始数值
注意事项:
- 描述文本通常用双引号括起来
- 每个值-描述对之间用空格分隔
- 必须以分号(;)结束
- 不是所有信号都需要VAL_描述,主要用于有离散状态的信号
2.12 EV (Environment Variable) - 环境变量
在DBC(Database Container)文件中,EV(Environment Variable) 是用于定义和描述环境变量的语法元素,主要用于在CAN(Controller Area Network)通信或仿真环境中动态配置或传递参数。以下是其核心作用及详细说明:
主要作用:
- 动态参数配置
EV允许在运行时动态修改变量值(如标定参数、模式切换等),而无需重新编译ECU代码或DBC文件。 - 仿真与测试
在CANoe、CANalyzer等工具中,通过EV模拟真实环境下的变量(如温度、车速),激励被测系统(如ECU)。 - 跨节点共享数据
不同ECU或测试节点可通过环境变量交换全局数据(例如故障码、系统状态)。
关键语法属性:
在DBC文件中,EV的定义通常包含以下属性:
EV_ <name> : <type> [<min>|<max>|<unit>|<value>] <initial_value> <access_type> <node_name>;
<name>:变量名称(如EngineTemp)。<type>:数据类型(INT、FLOAT、STRING等)。<min>|<max>|<unit>:可选的范围和单位(如0|150|°C)。<initial_value>:初始值(如25)。<access_type>:访问权限(DUMMY_NODE_VECTOR0表示无权限限制,UNUSED为占位符)。<node_name>:关联的ECU节点(如ECU1)。
典型应用场景:
- 标定参数调整
例如,通过EV_ ThrottlePosition: FLOAT 0 100 % 50 DUMMY_NODE_VECTOR0 ECU1;实时调整油门位置。 - 故障注入测试
定义EV_ FaultCode: INT 0 255 "" 0 DUMMY_NODE_VECTOR0 ECU2;模拟故障码触发ECU反应。 - 多ECU协同
共享EV_ SystemMode: ENUM (OFF,STANDBY,RUN) 0 DUMMY_NODE_VECTOR0 GLOBAL;,同步系统模式。
工具链支持:
- CANoe/CANalyzer:通过CAPL脚本或面板控件读写EV,例如:
// CAPL中设置环境变量值 setEnvironmentVariable("EngineTemp", 85.5); - 自动化测试:集成到Test模块中,动态修改EV值验证ECU逻辑。
- 实时监控:在Trace窗口中跟踪EV的变化趋势。
注意事项:
- 作用域:EV可以是全局(
GLOBAL)或绑定到特定ECU。 - 性能影响:频繁更新高优先级EV可能增加总线负载。
- 与信号(Signal)的区别:EV不直接映射到CAN报文,而是独立于总线通信的变量。
通过合理使用EV,可以显著提升CAN系统开发的灵活性和测试效率。
3 总结
以上是DBC文件主要关键字和属性语法的详细说明和示例。DBC文件通过这些定义完整描述了CAN总线上的通信协议,可以被各种CAN工具解析和使用。希望对大家更好地理解DBC文件有所帮助!


















 4451
4451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











