



📊 PLC自动化设计 | 毕业设计指导 | 工业自动化解决方案
✨ 专业领域:
- PLC程序设计与调试
- 工业自动化控制系统
- HMI人机界面开发
- 工业传感器应用
- 电气控制系统设计
- 工业网络通信
💡 擅长工具:
- 西门子S7系列PLC编程
- 三菱/欧姆龙PLC应用
- 触摸屏界面设计
- 电气CAD制图
- 工业现场总线技术
- 自动化设备调试
📚 主要内容:
- PLC控制系统设计
- 工业自动化方案规划
- 电气原理图绘制
- 控制程序编写与调试
- 毕业论文指导
- 毕业设计题目与程序设计
✅ 具体问题可以私信或查看文章底部二维码
✅ 感恩科研路上每一位志同道合的伙伴!
(1)桥式起重机防摆动力学模型的建立 研究首先建立了桥式起重机的防摆动力学模型。为了简化分析,将大车和小车的运动解耦,假设大车处于静止状态,只考虑小车沿着x轴方向的运行和负载的摆动。通过建立“小车-负载”动力学模型简图,利用拉格朗日方程构建了动力学非线性模型。将起重机系统参数代入状态方程中,通过MATLAB软件分析了模型的稳定性、可控性和可观性,为后续的控制器设计提供了理论基础。
(2)粒子群优化的模糊PID控制器的设计 研究设计了一种粒子群优化的模糊PID控制器。首先介绍了常规PID控制原理和模糊控制理论,然后基于这些理论,设计了模糊控制PID。利用模糊控制不依赖于被控制对象的特点,针对小车被控位移和摆角设计了两个模糊控制器。根据输入和输出变量的论域范围建立了隶属度函数,参照模糊规则表输出增量参数,然后进行解模糊化。为了解决量化、比例因子需人为设定的问题,引入了粒子群算法,设计了粒子群优化模糊PID控制器。通过Simulink建立仿真模型,仿真对比结果显示,优化后的系统性能有明显提升。
(3)桥式起重机防摆系统的整体方案设计 研究根据起重机系统的控制要求,设计了系统的总体方案。介绍了PLC的结构组成,对各PLC型号、大小车和起升机构变频器型号、电动机型号、编码器型号、传感器和触摸屏型号进行了选择。利用倍加福编码尺建立了位置检测系统。根据系统总体方案进行了软件设计,对系统进行硬件组态,编写了相关PLC程序。介绍了主要控制模块程序,利用TIA Portal Win CC设计了触摸屏界面并进行了仿真。
% craneParams: 起重机参数
% loadParams: 负载参数
% 初始化模糊PID控制器
fpidController = initFPIDController(craneParams, loadParams);
% 系统运行仿真
for t = 1:simulationTime
% 获取小车位置和摆角
position = getCranePosition(t);
angle = getLoadAngle(t);
% 计算模糊PID控制器的输出
output = calculateFPIDOutput(fpidController, position, angle);
% 更新小车和负载的状态
updateCraneState(output);
% 记录系统性能指标
recordPerformanceMetrics(t, output);
end
% 可视化系统性能
visualizePerformanceMetrics();
% 定义模糊PID控制器初始化函数
function fpidController = initFPIDController(craneParams, loadParams)
% ... 实现模糊PID控制器初始化逻辑 ...
end
% 定义计算模糊PID输出函数
function output = calculateFPIDOutput(fpidController, position, angle)
% ... 实现模糊PID输出计算逻辑 ...
end
% 定义更新起重机状态函数
function updateCraneState(output)
% ... 实现起重机状态更新逻辑 ...
end
% 定义记录性能指标函数
function recordPerformanceMetrics(t, output)
% ... 实现性能指标记录逻辑 ...
end
% 定义性能指标可视化函数
function visualizePerformanceMetrics()
% ... 实现性能指标可视化逻辑 ...
end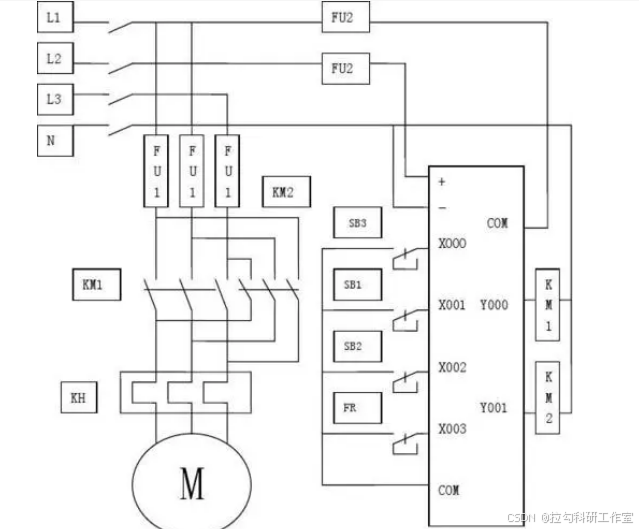

















 1000
1000

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









