







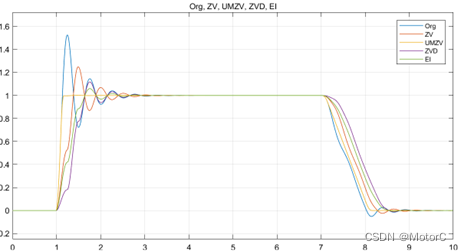
 本文探讨了防摇摆问题,特别是在起重机提升重物时的重心偏移和移动过程中摇摆。介绍了闭环和开环控制系统的优缺点,以及单摆模型在分析摇摆周期中的应用。重点讨论了输入整形方法,如ZV、UM-ZV和ZVD,以及不同加速时间下响应和指令曲线的对比。
本文探讨了防摇摆问题,特别是在起重机提升重物时的重心偏移和移动过程中摇摆。介绍了闭环和开环控制系统的优缺点,以及单摆模型在分析摇摆周期中的应用。重点讨论了输入整形方法,如ZV、UM-ZV和ZVD,以及不同加速时间下响应和指令曲线的对比。
防摇摆
摇摆又分为将重物调离地面时,重心偏移导致的摇摆。第二吊起重物移动过程中的摇摆。
电气防摇摆可以采用开环控制系统或闭环控制系统完成。
闭环控制系统需要增加偏摆角度测量装置,控制精度高,稳定性好,但控制较复杂,成本较高。
开环控制系统不需要测量偏摆角,而是根据已有的测量数值通过控制算法实现对桥机的防摇控制。它一般能减少摇摆度90%,也能起到良好的稳定效果,满足现场需求,且控制难度和成本较闭环系统有所降低。
数学方程:
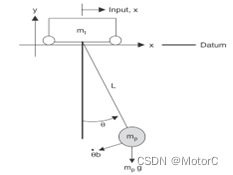
起重载荷的摇摆可以近似看作单摆现象。由单摆周期公式 T=2π*sqrt(L/g ) 可以看出,吊物摆动的周期和重物的质量无关,只跟摆绳的长度有关。绳长越长,摆动周期越大。
防摇摆的原理:
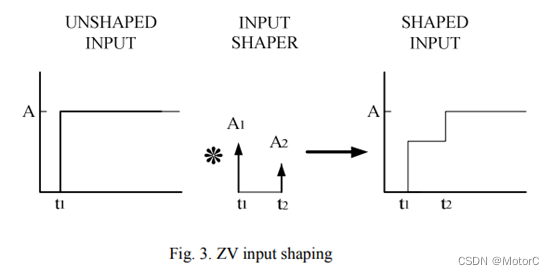
方法1 ZV
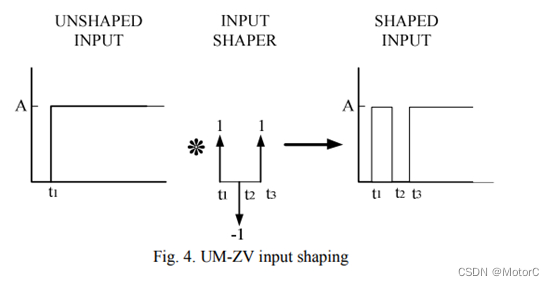
方法2 UM-ZV
方法3 ZVD
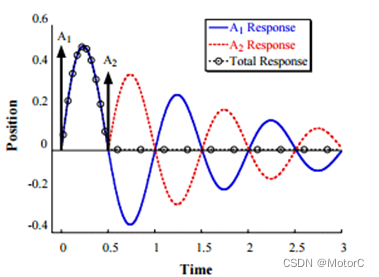
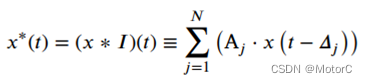
输入整形可以看做一系列特定时刻的脉冲信号与原始指令经过卷积运算后进行叠加
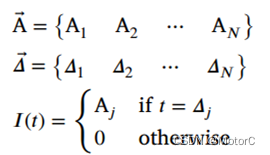
为了保证整形后的输入指令幅值没有变化,要求所有的脉冲信号的幅值之和为1.
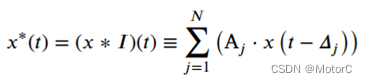
这里以ZVD输入整形器为例,进行指令处理。
方法4 EI
省略
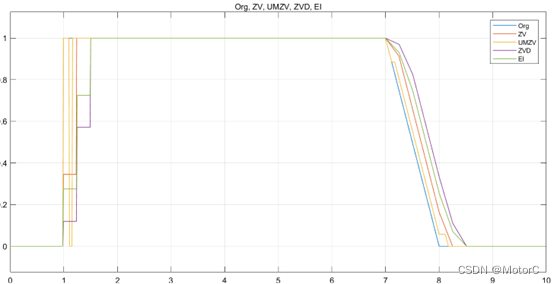
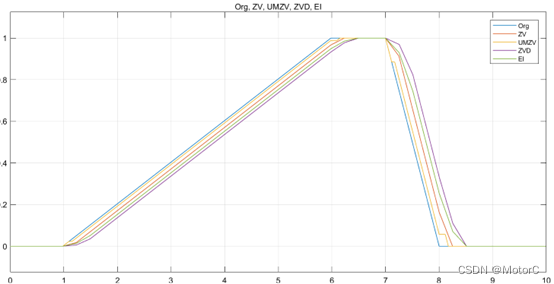
方案总结
短加速时间
响应曲线
指令曲线
长加速时间
响应曲线
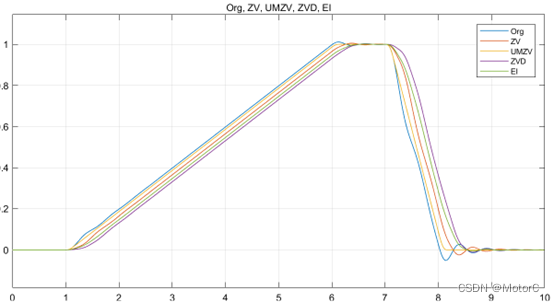
指令曲线

















 607
607

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









