






历时一天,因为之前用手机热点,即使换源了下载还是很慢。今天用校园网以后好了很多了(校园网还是挺好用的),期间也踩了点坑,记录一下,也希望能帮到看这篇博客的你。
主要参考了以下博客:
https://blog.csdn.net/weixin_44047777/article/details/103772146
https://blog.csdn.net/qq_36396941/article/details/88903236
步骤大同小异
首先说一下硬件
jetson nano一台,配了个无线网卡+天线(接收无线信号用),64G内存卡,其他就不是很重要了。前提是要刷好系统,刷系统可以参考上面的博客。
一、注意!以下操作权限均为普通用户而非root用户!
1.首先需要执行源备份
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
2.然后执行换源
sudo gedit /etc/apt/sources.list
3.打开sources.list文件,全选删除,然后再粘贴清华源
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial main restricted
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates main restricted
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial universe
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates universe
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial multiverse
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates multiverse
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security main restricted
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security universe
deb [arch=amd64,i386] http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security multiverse
4.按照参考博客要求
系统设置->软件和更新->ubuntu软件,前面四个打勾
系统设置->软件和更新->更新,前面两个打勾
点击关闭,弹出的框选择reload(英文菜单下是这个,总之不点取消的那个就行)
5.加载源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
6.加载密钥(密钥可能会过期,以下密钥是我在2020/8/4测试还可以使用的,如果过期了需要另外查找)
sudo -E apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
7.更新
sudo apt-get update
8.下载ROS(确保网络通畅,每个人安装需要的时间不同)
sudo apt-get install ros-melodic-desktop-full
二、上述步骤完成无误后,进入下一个步骤
1.一次执行以下命令
sudo rosdep init
rosdep update
2.如果提示rosdep命令找不到,则执行
sudo apt install python-rosdep
3.再依次执行
sudo rosdep init
rosdep update
如果还是出错,可以参考博客的解决方案,如果没有错误则直接看设置环境变量部分
首先更换一下源,执行以下步骤
sudo sed -i "s/raw.githubusercontent.com/raw.githubusercontent.serctl.com/g" /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
sudo sed -i "s/raw.githubusercontent.com/raw.githubusercontent.serctl.com/g" /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
sudo sed -i "s/raw.githubusercontent.com/raw.githubusercontent.serctl.com/g" /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py
sudo sed -i "s/raw.githubusercontent.com/raw.githubusercontent.serctl.com/g" /etc/ros/rosdep/sources.list.d/20-default.list
安装依赖(注意,因为我当前使用的用户为普通用户,所以相比博客使用的命令,我需要在前面加上sudo)
sudo apt install -y python-rosinstall python-rosinstall-generator python-wstool build-essential python-rosdep2 vim openconnect openssh-server
再依次执行
sudo rosdep init
rosdep update
三、设置环境变量
1.依次执行
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
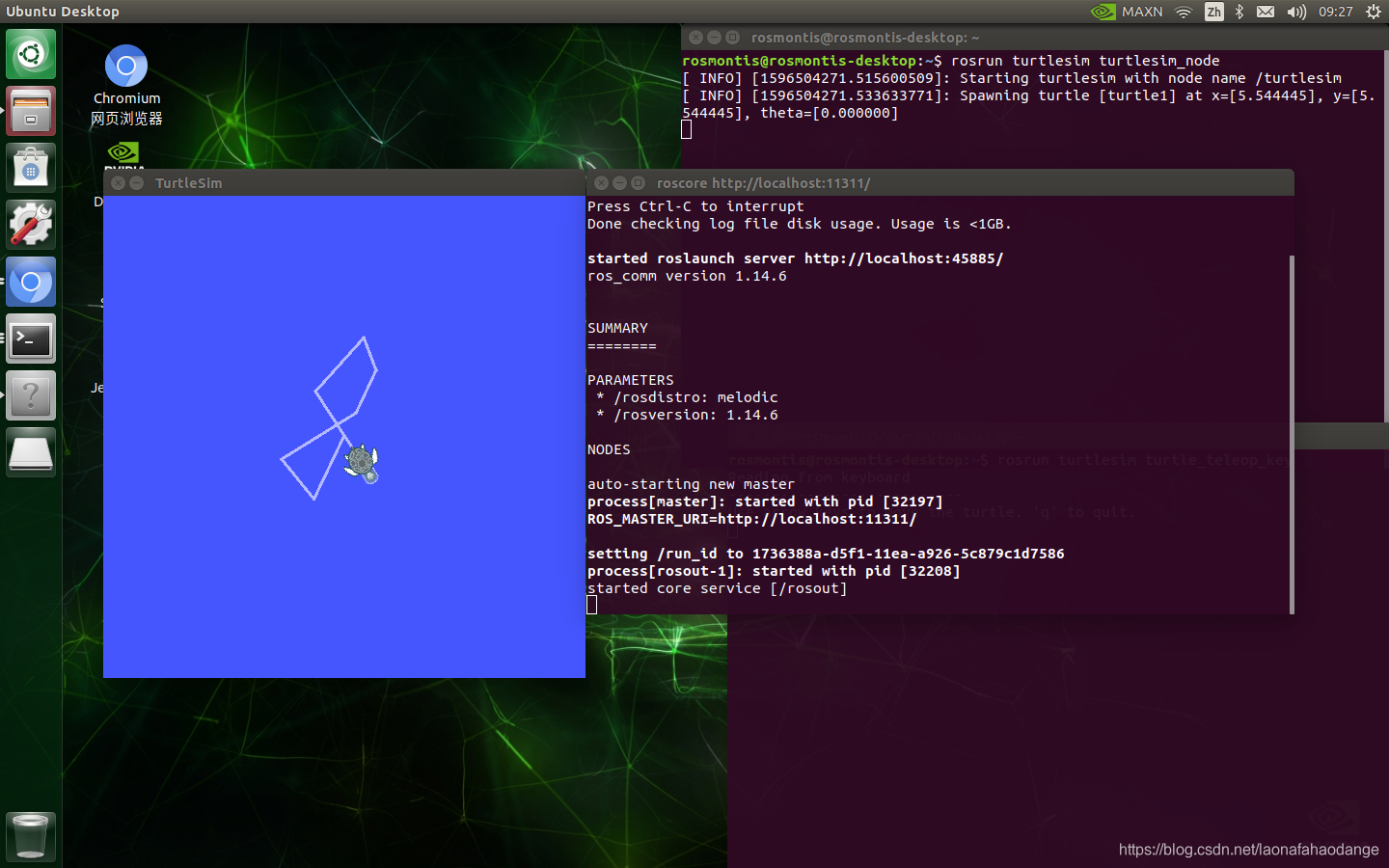
2.测试ROS
分别打开三个终端,分别执行以下语句
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
如果报错或者其它问题,试试执行
sudo gedit /opt/ros/melodic/setup.sh
在文本的最前面加上
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
然后保存,再测试一下ROS
或者
gedit ~/.bashrc
把最底部重复出现的
source /opt/ros/melodic/setup.bash删除掉
以上就是安装过程遇到的坑以及填坑的方法,自己做个总结的同时也希望能帮助到在看这篇博客的你。也感谢前面两篇博客的作者。最后附上一张测试海龟移动的图















 5442
5442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









